
Fターム[5H560HC00]の内容
無整流子電動機の制御 (40,007) | 正逆転 (61)
Fターム[5H560HC00]の下位に属するFターム
電源極性の切換 (5)
位置検出手段の入力極性切換 (6)
正逆転用位置検出手段の切換 (3)
通電相順を変えるもの (22)
その他 (3)
Fターム[5H560HC00]に分類される特許
1 - 20 / 22
ブラシレスモータおよびこれを備える車両
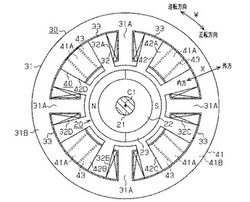
【課題】ロータの回転が不安定になることが抑制される構成を備え、そのうえでコストの低減に貢献することのできるブラシレスモータおよびこれを備える車両を提供する。
【解決手段】モータは、第1U相コイル32Aおよび第2U相コイル32Bと、第1V相コイル32Cおよび第2V相コイル32Dを有する2相の第1コイル32と、第1U相コイル42Aおよび第2U相コイル42Bと、第1V相コイル42Cおよび第2V相コイル42Dとを有する2相の第2コイル42とを有している。そして、各U相コイル32A,32Bおよび各V相コイル32C,32Dの周方向Wの位置と、各U相コイル42A,42Bおよび各V相コイル42C,42Dの周方向Wの位置とが互いに異なる。
(もっと読む)
ファンモータ駆動装置およびそれを用いた冷却装置

【課題】冷却ファンに付着した埃を除去する。
【解決手段】複数のコンパレータCMPU〜CMPWはそれぞれ、複数のコイルLU〜LWごとに設けられ、対応するコイルの一端に生ずる逆起電力VU〜VWを、複数のコイルの中点電圧VCOMと比較し、比較結果を示す逆起電力検出信号BEMFU〜BEMFWを生成する。駆動信号合成回路14は、複数のコンパレータCMPU〜CMPWの出力にもとづいて、(i)ファンモータ6の駆動開始後の所定の反転期間の間、ファンモータ6を通常運転時とは反対方向に回転させ、(ii)その後、ブレーキ期間の間、ファンモータ6にブレーキをかけ、(iii)続く通常駆動期間において、ファンモータ6を通常運転時の方向に回転させるための駆動制御信号S4を生成する。駆動回路16は、駆動制御信号S4にもとづきファンモータ6を駆動する。
(もっと読む)
電動機の駆動制御方法
【課題】モータに所定以上の負荷が作用したまま負荷保持動作に移行している間、各相コイルの発熱温度を均一化するように駆動制御する電動機の駆動制御方法を提供する。
【解決手段】制御回路7はモータコイル3に通電状態で、かつモータ負荷が所定負荷以上で負荷保持状態に移行し、当該負荷保持状態に移行している間、任意のロータ回転位置から所定電気角±((180/n)°;nは相数)だけ正逆回転する動作を繰り返す。
(もっと読む)
ブラシレスモータの駆動装置及びブラシレスモータを適用した電動車両
【課題】ブラシレスモータのセンサレス駆動方式において、始動前における回転状態を検知して適切な始動方式を決定し、逆回転状態を検知した場合の的確な逆転制動制御を実現し、逆回転状態から制動停止状態を検出してスムーズな正回転加速に引き継ぐ手段を提供する。
【解決手段】直接転流タイミングを与える位置における逆起電圧を検出して転流制御する手法をもとに、始動前のロータの回転状態を検出してそれぞれ最適の始動方式を決定すると共に、逆回転の低速時の逆起電圧を有意に増幅してロータの逆転制動から停止に至るロータ位置の測定感度を上げる手段によって、逆回転から制動、停止、さらに正回転にいたる連続した転流制御を実現する。
(もっと読む)
モータ制御装置並びにこれを備えた氷破砕機,給水機及び冷蔵庫
【課題】ブレーキ動作の信頼性を向上し、高速回転しているモータを短時間で停止させることを目的とする。
【解決手段】電圧信号によってインバータのアームの動作/停止が切り替わるモータドライバICと、該モータドライバICに前記電圧信号を入力し且つ正転/逆転設定信号によってモータの正転/逆転設定を切り替える制御回路と、を有し、前記モータドライバICは前記モータの回転数に応じて前記電圧信号の電圧値を増減させて該モータを停止させることを特徴とする。
(もっと読む)
カメラ及びモータ制御装置
【課題】カメラ内の可動部を駆動するモータを、さらに低速回転させることにより更なる静音化及び停止精度の向上が可能なモータ制御装置駆動装置、及びそれを備えるカメラを提供する。
【解決手段】本発明のカメラは、可動部(20)を駆動するモータ(34)に対して、第1の周期で第1の期間行うデューティ制御を、前記第1の周期よりも長い第2の周期で繰り返して行うモータ制御装置(50)を備えること、を特徴とする。
(もっと読む)
電動モーターの駆動制御回路及びそれを備える装置
【課題】電動モーターから回生可能な電力の回収効率を向上させる技術を提供する。
【解決手段】電動モーターの駆動制御回路は、駆動信号生成部と、電流センサーと、回生制御部とを備える。回生制御部は、電動モーターの逆駆動時において、電流センサーにより測定されたコイル電流値VAが閾値Vref以下の間に回生を実行する。
(もっと読む)
電動機器
【課題】正回転、逆回転ともに最適な進角で転流制御可能であって、且つ急激な負荷変動にも対応可能な電動機器を提供する。
【解決手段】電動機器Aは、モータ1と、モータ1の回転方向を切り替えるための切替スイッチ6と、切替スイッチ6からの切替信号に応じて正転信号または逆転信号を出力する制御回路3と、制御回路3からの正転信号または逆転信号に応じてモータ1を正転または逆転させる駆動回路2と、モータ1のロータ位置を検出し、検出したロータ位置に対応するセンサ信号を制御回路3に出力するロータ位置検出センサ5とを備える。制御回路3は、センサ信号に応じてモータ1の各コイルへの転流パターンを決定するとともに、決定した転流パターンで進角制御を行うのであるが、センサ信号が入力された後、このセンサ信号に対応する転流までの間に次のセンサ信号が入力された場合、進角を0°にするとともに次のセンサ信号に対応する転流を実行する。
(もっと読む)
電動パワーステアリング装置
【課題】 3相モータの1相が通電不良となり2相通電駆動する場合に、エネルギーロスおよびトルク変動を抑えつつモータを良好に回転させる。
【解決手段】 2相通電指令部107は、電動モータ20への通電不良が1相だけ発生しているときに、通電不良が発生していない2相を使って電気角θeの変化に対して変動しない操舵アシストトルクを発生するための理論上の2相通電用電流演算式と、電動モータ20の上限電流を規定する最大電流と、2相通電用電流演算式における電気角θeを進める進角量θaとに基づいて、2相通電用の指令電流を演算する。進角量設定部110は、指令電流の通電方向が反転する直前位置における電動モータ20の運動エネルギーに応じて進角量θaを設定する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】電動パワーステアリング装置の大型化に伴い、モータ電流が大電流化するなどアナログ検出値が増大しても、AD変換回路の分解能を変更することなく、アナログ値を精度良くデジタル値に変換して電動パワーステアリング装置を正確に制御し、ハンドル操作の違和感を感じさせない電動パワーステアリング装置の制御装置を提供する。
【解決手段】AD変換回路に入力するアナログ値をAD変換回路が精度良く変換できる値にシフトさせ、アナログ値からデジタル値に精度良く変換した後で、シフトした値を元に戻すことによりアナログ入力値を広い範囲に亘り精度良く変換できる。
(もっと読む)
単相ブラシレスDCモータの駆動回路
【課題】正回転時にも逆回転時にも確実な起動を行うことができる単相ブラシレスDCモータの駆動回路を提供する。
【解決手段】磁気センサ7は、ティース4a、4b間の中央である進角0度近傍に配置され、磁気センサ8は、磁気センサ7の位置よりモータ正回転方向に所定の進角を有する。正回転の起動時には、選択回路12は、磁気センサ8の磁極位置検出信号を選択して出力し、制御回路14は、マグネットロータ2の磁極に対してティース4a,4bが斥力を生むモータコイル6の通電方向となるようにスイッチング回路13を制御して起動させる。逆回転の起動時には、選択回路12は、磁気センサ7の位置検出信号を選択して出力し、制御回路14は、マグネットロータ2の磁極に対してティース4a,4bが引力を生むモータコイル6の通電方向となるようにスイッチング回路13を制御して起動する。
(もっと読む)
電動装置
【課題】電動装置が備える1つの軸に、複数のロータを設け、その複数のロータに被駆動部材を連結させることのできる技術を提供することを目的とする。
【解決手段】電動装置700は、電磁コイル12A,12Bと位置センサ40A,40Bとを有する複数のステータ10と、複数のステータ30に固定された軸部64と、永久磁石32を有し、軸部の周囲を回転する複数のロータ30と、を備える。複数のロータ30には、電動装置で駆動される被駆動部材70,71が連結されている。
(もっと読む)
産業機械の制御装置
【課題】インバータが制御可能な最大電圧や電流を考慮でき、また、高効率に運転でき、機械の作業能力をより高めることができるサーボモータ駆動方式の産業機械の制御装置を提供すること。
【解決手段】交流モータ1と、交流モータ1を駆動するインバータ14と、交流モータ1が駆動する機械の作業時のエネルギーを確保する電気的エネルギー蓄積装置13と、交流モータ1を制御するための制御装置を持つ産業機械の制御装置であって、インバータ14の直流側の直流電圧と、交流モータの1トルク指令またはトルク指令相当信号と、交流モータ1の回転速度に応じて交流モータ1を駆動する無効電流を零または負に制御する。
(もっと読む)
モータ制御装置
【課題】 手作業での位置センサの調整などを行うことなく、位置センサの出力に基づいてモータを精度よく制御できるようにする。
【解決手段】 位置センサの出力に基づいてモータを制御する第1の制御手段と、位置センサの出力に依らずにモータの電気角E0を算出し、この電気角E0を用いてモータを制御する第2の制御手段と、第2の制御手段によりモータが制御される際に、位置センサの出力からモータの電気角E1を算出し、この電気角E1と第2の制御手段により算出される電気角E0との角度差Dから補正値を求める設定手段とを備える。
第2の制御手段は、モータを中速域ないし高速域の回転速度で回転するよう制御し、第1の制御手段は、位置センサの出力から算出したモータの電気角E1を設定手段により求められた補正値を用いて補正し、補正された電気角に基づいてモータを制御する。
(もっと読む)
モータ制御装置
【課題】安価な構成の回転子位置検出器を使用して、モータの回転数が変化している場合でも高精度に回転位置を推定するとともに回転位置の誤差補正をして高精度に同期モータの制御を行なうことができるモータ制御装置を提供すること。
【解決手段】加算器23は、回転子位置検出器11cからの間欠的に出力される先と次の各位置情報θhicの間の同期モータMの回転速度を推定実速度ωと推定して速度制御部19と変換部24から加算器27を介して電流制御部20に出力する。従って、同期モータMが所定の回動角と次の回動角の間を回動中にも、実際のモータの回転速度と見なせる推定実速度ωによって速度制御部19と電流制御部20は演算を行い電圧指令値Vcが算出できる。その結果、モータ制御装置11は、同期モータMの回転位置が先と次の各位置情報θhic間であっても、モータの実速度と見なせる推定実速度ωにより精度の高いモータ制御が行える。
(もっと読む)
モータ駆動装置およびモータ駆動方法
【課題】逆回転ブレーキ制御時にモータコイルに通電する電流波形の位相を遅らせて、逆回転ブレーキ制御時のモータの騒音,振動を低減する。
【解決手段】位置検出部2はセンサ1からのロータ位置検出信号が入力され、モータ9の誘起電圧の位相と一致した位置検出信号P0を生成して、位相制御部10に入力する。位相制御部10は入力の位置検出信号P0から位相を所定量だけシフトした位相信号P1を生成し、回転方向切替信号FRに応じて出力する。通電制御部3は、位相制御部10からの出力を受け、モータコイルの各相に対する電流を通電するタイミングを決定する通電切替信号(モータ駆動信号)を生成し、モータ駆動部4は通電切替信号に応じてモータ9へ電流を供給する。逆回転ブレーキ制御時には位相信号P1を用いてモータコイルの通電位相を遅らせて、モータ9の誘起電圧の影響で生じる電流波形のひずみを抑え、騒音,振動を低減する。
(もっと読む)
ブラシレスモータ用制御装置
【課題】3相間のアンバランスの影響を低減すると共にモータの周波数特性を改善してモータ性能を向上できるブラシレスモータ用制御装置を提供する。
【解決手段】U相電流Iu 、V相電流Iv 、W相電流Iw 、ロータ回転位置に対応するd軸電流Id とq軸電流Iq のフィードバック演算である積分演算により求めたd軸目標電圧Vd * とq軸目標電圧Vq * に対応する第1のU相目標電圧Vu1* 、第1のV相目標電圧Vv1* 、第1のW相目標電圧Vw1* を演算する。各相電流Iu 、Iv 、Iw のフィードバック演算である比例演算によって第2のU相目標電圧Vu2* 、第2のV相目標電圧Vv2* 、第2のW相目標電圧Vw2* を演算する。第1と第2のU相目標電圧の和に対応するU相目標電圧Vu * 、第1と第2のV相目標電圧の和に対応するV相目標電圧Vv * 、第1と第2のW相目標電圧の和に対応するW相目標電圧Vw * を各コイルに印加することでモータ1を駆動する。
(もっと読む)
電動パワーステアリング装置
【課題】操舵補助用のブラシレスモータの最適なロータ位置推定アルゴリズムを選択することができる電動パワーステアリング装置の提供。
【解決手段】操舵補助用のブラシレスモータに高周波電圧(又は高周波電流)を注入し、その応答電流(又は応答電圧)に基づき、ブラシレスモータのロータ位置を推定する第1推定手段(S8)と、検出した相電圧及び相電流に基づき、ロータ位置を推定する第2推定手段(S6)と、トルクセンサが検出した操舵トルク(S2)が、閾値以上であるか否かを判定する判定手段(S4)とを備え、判定手段が閾値以上でないと判定したときは、第1推定手段(S8)が推定したロータ位置に、判定手段が閾値以上であると判定したときは、第2推定手段(S6)が推定したロータ位置に基づき、ブラシレスモータを駆動する構成である。
(もっと読む)
電動工具
【課題】ブラシモータに代えてブラシレスモータを使用することにより、長期間にわたり安定した機能を発揮するとともに、メンテナンスに負荷のかからない電動工具を提供すること。
【解決手段】モータ4の正逆回転を一回以上繰り返して作業部5を動作させる電動工具Aにおいて、上記モータ4をブラシレスモータで構成し、該モータ4はロータ15の位置を検出するセンサHを、ロータ15の正回転方向でステータ歯部16同士の中間より電気角で30°±θ°進角するように配置し、上記モータ4の回転を制御する制御部20は上記センサHの検出結果に基づいて、モータ4の駆動信号を制御するとともに上記ロータ15の正逆何れの回転においても上記ロータ15とセンサHの検出信号との関係が同等になるように上記センサHの検出信号を選択した。
(もっと読む)
モータの制御装置
【課題】位置センサから出力されるパルス信号を計数したカウンタ値が、モータの実際の回転角に対応した値からずれている場合に、そのずれの原因が位置センサの故障によるものなのか否かを判定することができるモータの制御装置を提供する。
【解決手段】位置センサからのパルス信号のエッジを計数したカウンタ値がモータの実際の回転角に対応する値からずれているとき、その対応する値に対するカウンタ値のずれ量についてその積算値である積算ずれ量ΔPaを所定周期毎に算出する。そして、その積算ずれ量ΔPaの変化速度ΔPsを算出し(S310)、算出された変化速度ΔPsが故障判定値A以上である場合には(S320:YES)、位置センサに故障ありと判定する(S330)。一方、変化速度ΔPsが故障判定値A未満である場合には(S320:NO)、位置センサに故障なしと判定する(S340)。
(もっと読む)
1 - 20 / 22
[ Back to top ]