
Fターム[5H560TT06]の内容
無整流子電動機の制御 (40,007) | 回路要素 (3,527) | 遅延回路 (28)
Fターム[5H560TT06]に分類される特許
1 - 20 / 28
単相ブラシレスモータ制御装置
【課題】単相コイルで構成されるモータにおいても、追加部品を必要とせず、駆動回路や電源回路などの耐圧破壊を防ぐ過電圧保護回路を備えた単相ブラシレスモータ制御装置を提供する。
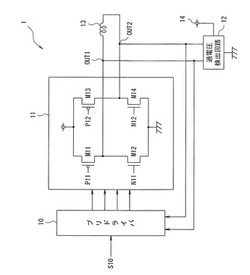
【解決手段】モータコイル13を駆動するドライバ回路11と、ロータの位置を検出した信号と、ドライバ回路11の出力とに基づいて、ドライバ回路11を構成するドライバ回路用スイッチング素子M11〜M14の制御信号を生成するプリドライバ10と、ドライバ回路11の出力の電位が電源電圧から予め設定されたしきい値以上の電位に上昇したとき、回生経路を形成する過電圧検出回路12と、回生経路を構成する回生経路用スイッチング素子とを備える。
(もっと読む)
PWM信号出力回路

【課題】モータに流れる電流が急激に変化することを抑制しつつ静かにモータを回転させることができるPWM信号出力回路を提供する。
【解決手段】第1のデューティ比のPWM信号を出力する第1出力部と、モータの回転速度に応じた周期を有するとともに論理レベルが交互に変化する速度信号の論理レベルが変化すると、速度信号の論理レベルが変化してから速度信号の論理レベルが次に変化するまでの間に、モータのモータコイルに流れる電流を増加させた後に減少させるべくデューティ比が第2のデューティ比に向かって上昇した後に第2のデューティ比から低下するPWM信号を出力する第2出力部と、速度信号の論理レベルが変化してから速度信号の論理レベルが次に変化するまでの間に、デューティ比が入力信号のデューティ比に向かって上昇した後に入力信号のデューティ比から低下するPWM信号を出力する第3出力部と、を備える。
(もっと読む)
単相ブラシレスモータの駆動回路
【課題】 ホール素子などの位置検出素子を用いないで単相ブラシレスモータを駆動することで、モータの小型化や低コスト化を実現する。
【解決手段】 単相ブラシレスモータの駆動コイルに第1の駆動電流、および前記第1の駆動電流と反対方向の第2の駆動電流をいずれも供給しない非通電期間を挟んで、前記駆動コイルに前記第1の駆動電流と前記第2の駆動電流とを交互に供給するための駆動信号を生成する駆動信号生成回路と、前記駆動信号に応じて前記駆動コイルに前記第1または第2の駆動電流を供給する出力回路と、前記非通電期間に、前記駆動コイルに発生する誘起電圧のゼロクロスを検出するゼロクロス検出回路と、を有し、前記駆動信号生成回路は、前記出力回路が前記駆動コイルに前記第1または第2の駆動電流を供給する通電期間の開始から、前記ゼロクロス検出回路が前記ゼロクロスを検出するまでの駆動周期に基づいて、次の通電期間の長さを決定する。
(もっと読む)
モータの回転制御装置及び方法、並びにそれを用いた画像形成装置
【課題】 瞬間的にクロックが入力されなかった場合でも回転を維持できるPLL制御を用いたモータの回転制御装置及び方法、並びにそれを用いた画像形成装置を提供する。
【解決手段】 PLL制御部12がクロックCKと位置検出信号Stとの差を偏差信号Seとして出力し、コントロール部202が偏差信号と位相検出信号Sfとから駆動信号Smを出力する、モータの回転制御装置において、コントロール部は、偏差信号が入力された場合、駆動信号を遅延させた遅延駆動信号Smdを出力し、遅延駆動信号の出力を開始してから所定時間が経過した後、駆動信号を遅延させずに出力し、モータの使用回転速度は最低回転速度の2倍以上であり、遅延時間は使用回転速度に対応するクロック周期の2倍以上の整数倍であり、所定時間は遅延時間以下である。これにより、瞬間的にクロックが入力されなかった場合でもモータの回転を維持することできる。
(もっと読む)
モータ駆動装置およびそれを用いた冷却装置、多相センサレスモータの状態の判定方法
【課題】センサレスモータの起動時において、その状態を正確に判定可能な検出回路を提供する。
【解決手段】複数のコンパレータCMPU〜CMPWは、それぞれが複数のコイルLU〜LWごとに設けられ、対応するコイルの一端に生ずる逆起電力VU〜VWを、中点電圧VCOMと比較し、比較結果を示す検出信号BEMFU〜BEMFWを生成する。遅延回路62U〜62Wは、複数のコンパレータCMPU〜CMPWそれぞれから出力される検出信号BEMFU〜BEMFWを所定時間τ、遅延させる。判定部70は、遅延前の検出信号BEMFU〜Wおよび遅延後の検出信号BEMFDU〜Wを、所定の期待値パターンEXP1、EXP2と比較する。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差(負荷角θL)に応じたアシストトルクが発生する。一方、検出操舵トルクTを指示操舵トルクT*に近づけるように、PI制御部23によって、加算角αが生成される。加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。加算角αは、必要時に、加算角変更部25によって変更される。加算角変更部25には、モータ負荷演算部27を介して検出操舵角の絶対値が与えられる。検出操舵角の絶対値が所定値以上になると、加算角αが零に変更される。
(もっと読む)
インバータ制御装置と電動圧縮機および家庭用電気機器
【課題】PWM信号がオフ期間中における位置検知のタイミングを補正し転流時間の遅れを低減することにより、ブラシレスDCモータが脱調停止するのを防止し信頼性の高いインバータ制御装置を提供するものである。
【解決手段】PWM信号のオン期間中における位置検知回路部206が出力する位置検知信号に基づいて、PWM信号のオフ期間中におけるロータ203bの位置検知を推定することにより、PWM信号のオフ期間中におけるロータ203bの位置検知の誤差を低減することができるという作用を有する。
(もっと読む)
モータ駆動回路
【課題】フェール時に短絡用スイッチング素子を保護して確実にフェール動作を行うことが可能なモータ駆動回路を提供することである。
【解決手段】上記した目的を達成するため、本発明の課題解決手段は、フェール時にリレー6を開くとともに短絡用スイッチング素子8を閉動作させるモータ駆動回路Cにおいて、フェール時に、リレー6の開動作に遅延させて短絡用スイッチング素子8を閉動作させるとともに、少なくともリレー6が開動作してから短絡用スイッチング素子8を閉動作するまでは各アーム1,2,3のスイッチング素子11,12,13,14,15,16の駆動を継続することを特徴とする。
(もっと読む)
モータ用駆動制御装置、モータシステム、並びに、モータ内蔵ローラシステム
【課題】モータやモータ内蔵ローラに対して回転速度が増大する方向に外力が作用しても回転速度を精度良く調整でき、逆起電力の発生を防止可能なモータ用駆動制御装置、並びに、当該モータ用駆動制御装置を備えたモータ内蔵ローラシステムの提供を課題とした。
【解決手段】制御装置10は、モータ2の回転子15の回転速度と設定速度とを速度比較部37で比較する。回転子15の回転速度が設定速度を基準として設定された基準速度よりも速い場合は、遅延パルス生成部32において、モータパルス認識部30からモータパルス信号とクロック信号生成部31で生成されたクロック信号とに基づき、モータパルス信号に対して位相が遅れた遅延パルス信号が発信される。モータ駆動部33は、遅延パルス信号に基づき、モータ2への通電を制御する。
(もっと読む)
モータ駆動回路、ファンモータ、電子機器、及びノート型パーソナルコンピュータ
【課題】モータコイルを間欠駆動する際のスイッチング間隔を短くすることを可能にする。
【解決手段】モータ駆動回路は、接続点の電圧がモータコイルの一端に印加される駆動電圧となる、直列に接続された第1及び第2トランジスタと、駆動電圧を、モータコイルの駆動を制御するための第1及び第2制御電圧の差に応じた電圧とすべく、第1及び第2トランジスタを制御するオペアンプと、モータコイルを間欠駆動するためのパルス信号が一方の論理レベルの場合、オペアンプの制御にかかわらず、モータコイルが駆動されない状態とすべく第1及び第2トランジスタを駆動し、パルス信号が他方の論理レベルの場合、オペアンプの制御に基づいて第1及び第2トランジスタを駆動するスイッチ回路と、パルス信号が一方の論理レベルから他方の論理レベルに変化すると、オペアンプの制御にかかわらず、パルス信号が他方の論理レベルである時間より短い所定時間、駆動電圧を上昇させるべく第1及び第2トランジスタを駆動する駆動補助回路とを備える。
(もっと読む)
モータ速度制御回路
【課題】回転速度のムラを抑制させるための専用の信号を入力させる必要のないモータ速度制御回路を提供する。
【解決手段】モータ速度制御回路は、モータの回転速度がコンデンサの充電電圧に応じた速度となるよう、充電電圧に基づいた駆動信号を出力する駆動信号出力回路と、モータの目標回転速度の上昇に応じて短くなる周期及び目標回転速度に応じたデューティ比を有する基準信号の周期と、回転速度の上昇に応じて短くなる周期を有する速度信号の周期とに基づき、回転速度を目標回転速度に一致させるべく、コンデンサを充電可能な第1レベルまたはコンデンサを放電可能な第2レベルの制御信号を、目標回転速度と回転速度との速度差及び基準信号の周期に応じた期間出力する速度制御回路と、基準信号のデューティ比に基づいて、目標回転速度が低くなると速度制御回路から出力される制御信号の第1レベルと第2レベルとのレベル差が小さくなるよう、レベル差を変更するレベル変更回路と、を備える。
(もっと読む)
電動機制御装置及び制御方法
【課題】 高価なマイクロコンピュータを必要とせず、電流応答性を向上した電流制御系を備えた電動機制御装置を提供する。
【解決手段】 出力電流をキャリア信号と同期したタイミングでサンプリングして検出する第1のサンプル・ホールド器と、指令電流と出力電流が一致するように制御する電流制御器と、電流制御器の出力を用いて演算された電圧指令をキャリア信号と比較してPWMパルスに変換するPWMパルス発生器と、指令電流をキャリア信号と同期したタイミングでサンプリングする第2のサンプル・ホールド器と、第2のサンプル・ホールド器の出力に基づいて電圧補償量を演算する電圧補償器と、電圧補償器の出力を電圧指令に加算して新たな電圧指令とする加算器を備える。
(もっと読む)
同期モータ制御装置とその制御方法
【課題】電流検出部へノイズが混入したり、電圧出力分解能が低くても、高精度な位置決めが可能で停止時の振動を抑制できる同期モータ制御装置とその制御方法を提供する。
【解決手段】同期モータに流れる電流を検出する電流検出部(9)と、前記電流を磁束方向のd軸電流と磁束と直行するq軸電流とに分解して電流を制御する電流制御部(14)と、同期モータの回転位置を検出する位置検出部(9)と、同期モータの回転速度を検出する回転速度検出部(12)とを備えた同期モータの制御装置において、前記回転速度とトルク指令に応じて前記d軸電流の大きさを調整するd軸電流調整部(15)を備えた。
(もっと読む)
モータ制御装置及びこれを用いた電動パワーステアリング制御装置
【課題】正常な電流検出回路の相電流を用いて、異常が生じた電流検出回路に対応する相電流を推定し、操舵補助制御の継続を図る。
【解決手段】正常時の電流検出回路20u、20vの相電流検出値Iua、Ivaからw相の相電流を推定し、相電流検出値Iua、Ivaと相電流推定値Iwbとを用いて操舵補助制御を行う。例えばv相の電流検出回路20vが異常のときは、サンプリングホールド回路27で遅延処理してモータ回転角θと同期させたu相の遅延相電流検出値Iua′と、モータ回転角θと、u相及びv相の位相差とから、v相の仮想相電流Ivfを推定する。u相の遅延相電流検出値Iua′が零のときは、サンプリングホールド回路27で遅延処理したv相の遅延相電流指令値Iv*′を仮想相電流Ivfとする。そして、u相の相電流検出値Iua′と仮想相電流Ivfとからw相の相電流推定値Iwbを算出する。
(もっと読む)
センサレス・ブラシレスモータの駆動制御方法及びその装置
【課題】低騒音、低振動で迅速な起動を可能とする。
【解決手段】フィルタ回路40a〜40cの位相特性にしたがって固定子巻線52a〜52cの励磁切り換えが行われる起動のためのセンサレス運転(図5のステップS122〜S130の処理)が行われ、ロータ53の回転が安定状態となったと判定されると(図5のステップS128参照)、通常運転状態としてのセンサレス運転(図5のステップS132〜S140の処理)が行われるようになっており、ここでは、フィルタ回路40a〜40cの出力位相に対して位相補償が行われ、位相補償後の位相が90度となるようにして励磁切り換えが行われるものとなっている。
(もっと読む)
電動機制御装置およびそれを備えた車両
【課題】電動機の静粛性を向上可能な電動機制御装置およびそれを備えた車両を提供する。
【解決手段】電流指令生成部102は、交流モータM1から発生するノイズ(振動および騒音)を低減可能な電流指令(低ノイズ電流指令)が交流モータM1のトルク毎に予め決定されたマップを用いて、交流モータM1のトルク指令TRに基づいてd軸電流指令Id*およびq軸電流指令Iq*を生成する。そして、その生成されたd軸電流指令Id*およびq軸電流指令Iq*に基づいて、インバータ20を駆動するための信号PWIが生成される。
(もっと読む)
モータ駆動用半導体装置とそれを有するモータ及びモータ駆動装置並びに空調機
【課題】マイコン等の制御用半導体装置を用い、正弦波駆動方式によるモータのトルクリップルの低減を行うときの、信頼性低下を防ぐ。
【解決手段】本発明のモータ駆動用半導体装置は、3相モータを駆動する6個のスイッチング素子と、前記3相モータのコイルの3端子それぞれへ出力電圧を印加する3個の出力端子と、前記6個のスイッチング素子を駆動する駆動回路と、前記6個のスイッチング素子それぞれをオン/オフ制御する6個の制御信号を入力する6個の制御信号入力端子とを備え、少なくとも1つの半導体チップをワンパッケージに樹脂封止したモータ駆動用半導体装置であり、前記6個の制御信号に対しデッドタイムを生成するデッドタイム生成機能を備えていることを特徴とする。
(もっと読む)
モータ駆動回路および方法ならびにそれを用いたディスク装置
【課題】非駆動期間の長さやタイミングを、モータの回転状態に応じて適応的に設定する。
【解決手段】逆起検出回路20は、モータ110の少なくとも1つのコイルに発生する逆起電圧Vuを、コイルの中点電圧Vcomと比較してゼロクロス点を検出し、逆起検出信号BEMF_EDGEを出力する。スイッチング制御回路30は、逆起検出信号BEMF_EDGEにもとづき、複数のスイッチング回路10のスイッチング状態を制御し、モータ110のコイルに流れる電流を調節する。ウィンドウ生成回路40は、逆起検出回路20によるゼロクロス点の検出に先立ち、逆起検出信号の周期Tp1に所定の係数を乗じた期間、所定レベルとなるウィンドウ信号WINDOWを出力する。スイッチング制御回路30は、ウィンドウ信号WINDOWが、所定レベルである期間、スイッチング回路10のスイッチングを停止し、ハイインピーダンス状態となる非駆動期間とする。
(もっと読む)
PMモータのための、切替ノードをベースとするセンサレスモータ制御
【課題】 モータの1つの相に結合されており、かつ、電源と接地点との間に接続されているインバータステージ内を流れる電流の符号を間接的に測定する回路を提供する。
【解決手段】 モータの相を、電源と接地点とに二者択一的に接続するために、インバータステージに結合されているゲートドライバ回路であって、電流符号検出回路を有するゲートドライバ回路を備えており、電流符号検出回路は、インバータステージのスイッチの転換を制御するために、インバータステージを流れる電流の符号、または逆起電力の符号を読み込む。
(もっと読む)
ブラシレスモータの駆動制御方法及びその装置
【課題】比較的安価に回転変動に対して応答性の良い回転制御を実現する。
【解決手段】
計数開始時が所定時間αづつずれた5つのタイマカウンタ1〜5により、所定時間Tsの計数を繰り返し行う一方(S112、S122、S133、S142、S152)、位置検出回路103の出力信号を基に零クロス点の検出を行うと共に、タイマカウンタ1〜5の所定の計数時間Ts内における零クロス点の検出回数の計数を繰り返し行い、タイマカウンタ1〜5による所定時間Tsの計数完了の度毎に、所定時間Ts内における零クロス点の検出回数を基に、駆動パルス信号の切り換えタイミングが演算、算出されるようになっている(S118、S128、S138、S148、S158)。
(もっと読む)
1 - 20 / 28
[ Back to top ]