
Fターム[5H560UA10]の内容
無整流子電動機の制御 (40,007) | 電子整流子機構の最終制御素子 (2,026) | 限定のないスイッチング素子 (72)
Fターム[5H560UA10]に分類される特許
1 - 20 / 72
モータ駆動制御装置及び方法
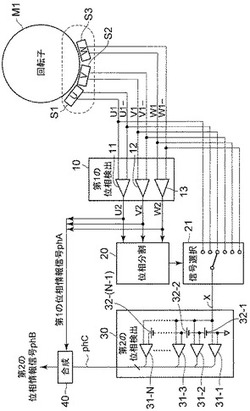
【課題】高価な光学式エンコーダを用いることなくモータ転流駆動用の磁気センサを利用しより多くの位相検出を行う。
【解決手段】複数相のコイルを有するモータの回転子の回転位置に応じた信号レベルを有する複数のセンサ信号に基づいて位相情報信号を発生してモータを駆動制御するモータ駆動制御装置において、センサ信号を所定の複数のしきい値レベルと比較して位相を検出し、当該検出した位相を示す位相情報信号を出力し、検出された位相を所定の複数の位相区間に分け、所定の複数の位相区間において複数のセンサ信号又はそれに対応する複数の信号の中から一つを選択し、分割された複数の位相区間において選択されたセンサ信号又はそれに対応する信号の信号レベルが回転子の所定の位相に応じた所定のしきい値レベルに到達したことを検出することにより、当該検出した位相を示す位相情報信号を出力する。
(もっと読む)
ブラシレスDCモータの回転子位置検出方法とその装置

【課題】 3つのホールセンサの信号出力とパルス交番信号の、合計4つの信号の値から、2相エンコーダの出力に相当する信号を生成することによって、モータ回転子の回転方向を判別することができるブラシレスDCモータの回転子位置検出方法とその装置を提供する。
【解決手段】 3つのホールセンサ2U,2V,2W信号の現在値と、その1つ前の値とから、前記回転子の回転方向を判別し、前記3つのホールセンサ2U,2V,2Wのうち、いずれか1つの立ち上がりエッジまたは、立ち下がりエッジを基準位置とし、かつ、この基準位置として立ち上がりエッジを選択するか、あるいは、立ち下がりエッジを選択するかは、前記回転子の回転方向によって決定して、前記基準位置を通過する度に交番する交番信号を生成し、前記3つのホールセンサ2U,2V,2Wの信号と、前記交番信号とから、2相エンコーダ出力相当のパルス信号を生成し、このパルス信号によって前記回転子位置を検出する方法。
(もっと読む)
ブロアモータ駆動装置
【課題】ブロアモータ側に付いている制御装置の基準クロックである動作クロックの精度が低いブロアモータ制御装置でも、実回転速度の検出誤差を抑制し、バラツキの少ない回転動作を可能とする。
【解決手段】上位システムからPWM信号デューティ比を用いて、目標回転速度を与えられるブロアモータ駆動装置であり、PWM信号の周期誤差を算出し、位置検出センサから算出されたロータ回転速度を、周期誤差に基づき乗算補正し速度制御を実施する。
(もっと読む)
制御装置
【課題】トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に対する追従性能を向上させるとともに、矩形波制御が実行される場合に、制御系が不安定になることを抑制できる交流回転電機の制御装置が求められる。
【解決手段】電圧制御部は、第一変調率域ではパルス幅変調制御を実行し、第二変調率域では矩形波制御を実行し、電流フィードバック制御部は、トルク指令に周期的なトルク振動が含まれる場合に、振動周波数の周期関数の特性を有する高調波モデルにより二相電圧指令を算出し、トルク電流演算部は、第一変調率域において変調率が増加するに従ってトルク振動の振幅を減少させ、第二変調率域でトルク振動の振幅をゼロとするように、トルク指令に含まれる前記トルク振動の制限を実行する制御装置。
(もっと読む)
制御装置
【課題】トルク指令に周期的なトルク振動が含まれる場合であっても、電流指令に対する追従性能を向上させるとともに、矩形波制御の実行が開始される場合に、矩形波の出力電圧波形の位相が急変することを防止できる交流回転電機の制御装置が求められる。
【解決手段】電流フィードバック制御部は、トルク振動の周波数の周期関数の特性を有する高調波モデルを用いた演算の出力値に少なくとも基づいて二相電圧指令を算出し、矩形波制御の実行が開始された場合は、トルク振動の周期に応じて設定された期間内でゼロとなるように、高調波モデルを用いた演算の出力値を徐々に変化させる減衰処理を実行する制御装置。
(もっと読む)
インバータ装置
【課題】 指令速度や負荷にかかわらず、モータのロックを的確に検出できる信頼性にすぐれたインバータ装置を提供する。
【解決手段】 モータの起動の開始から予め定めた一定時間内で、かつ推定回転速度が予め定めた一定値に達しないうちに、モータ電流が予め定めた設定値以上に上昇したとき、モータがロックしていると判定する。
(もっと読む)
ブラシレスモータ起動装置および起動方法
【課題】ロータ停止位置判定の誤差を少なくすることのできるブラシレスモータ起動装置および起動方法を提供する。
【解決手段】実施形態のブラシレスモータ起動装置1は、誘導電圧検出回路11が、ブラシレスモータ101の界磁コイルLU、LV、LWの中性点CN1に発生する界磁コイルの誘導電圧と、界磁コイルLU、LV、LWに並列に接続された抵抗RU、RV、RWの共通接続点である仮想中性点CN2に発生する仮想中性点電圧と、の差電圧に比例する電流を生成する。ブラシレスモータ起動装置1は、積分回路12が、1対の通電相に順方向および逆方向の電流を流したときに誘導電圧検出回路から出力される電流を、それぞれ一定期間、積分する。ブラシレスモータ起動装置1は、極性判定回路13が、積分回路12の積分値の極性を判定する。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】その目的は、モータ回転角速度を判定条件に加えることなく、精度良く通電不良を検出することのできるモータ制御装置及び車両用操舵装置を提供する。
【解決手段】通電不良検出部71は、相電流値が所定電流値以下であり、且つ電源電圧Vpsが所定電圧値以上である場合に、連続してDUTY指令値が所定電流値に対応する所定範囲の上限値以上であるという第1の判定条件、及び連続してDUTY指令値が下限値以下であるという第2の判定条件を満たすか否かを判定する。そして、通電不良検出部71は、第1の判定条件を満たす状態が継続する時間である第1の継続時間と、第2の判定条件を満たす状態が継続する時間である第2の継続時間とをそれぞれ計測し、第1又は第2の継続時間が、高速回転時におけるモータ21の回転周期に基づく判定時間を超えた場合に、通電不良が発生したと判定するようにした。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】トルク変動の発生を抑えつつ、加算角に含まれるモータ回転角速度の推定誤差を補正して、安定的にレゾルバレス制御を実行することのできるモータ制御装置を提供すること。
【解決手段】加算角調整演算部は、トルク偏差Δτに基づき第1変化成分が演算される方向に応じて、推定モータ回転角速度(ωm_e)に対応する第1の閾値dθlim1、及び当該第1の閾値dθlim1よりも推定モータ回転角速度(ωm_e)から離れた値を有した第2の閾値dθlim2を設定する。そして、これら二つの閾値(dθlim1,dθlim2)により規定される制限範囲内に加算角θaを制限する。更に、加算角調整演算部は、制御角と実回転角との乖離を示す負荷角を推定する。そして、その負荷角が安定領域外にある場合には、上記第1の閾値dθlim1を、推定モータ回転角速度(ωm_e)から、その想定される推定誤差の最大値に対応する所定値N2離れた値に変更する。
(もっと読む)
モータ駆動装置、および、それを用いたバルブタイミング調整装置
【課題】目標回転数の微小な変動に対してモータ回転数が過敏に変動するのを抑制可能なモータ駆動装置、および、それを用いたバルブタイミング調整装置を提供する。
【解決手段】目標回転数電圧信号生成部71では、目標回転数に係る目標回転数周波数信号を電圧に変換した目標回転数電圧信号を生成する。実回転数電圧信号生成部81では、実回転数に係る実回転数周波数信号を電圧に変換した実回転数電圧信号を生成する。フィードバック制御部91では、目標回転数電圧信号、および、実回転数電圧信号に基づき、実回転数が目標回転数と一致するようにモータ10への通電を制御する。また、目標回転数電圧信号の生成に係る時定数τ1は、実回転数電圧信号の生成に係る時定数τ2よりも大きい。これにより、目標回転数の微小な変動に対してモータ10の回転数が過敏に変動するのを抑制することができる。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】モータ制御の安定性を好適に維持しつつ、効果的にモータ電流を抑制することのできるモータ制御装置を提供すること。
【解決手段】低減時間調整部は、「負の値」を有するγ軸電流増減値を積算制御部に出力してγ軸電流指令値Iγ**(Iγ*)の低減を許可した時点から、所定時間t_thの経過をもって、新たなγ軸電流増減値の積算によるγ軸電流指令値Iγ**の低減を許可する。そして、低減時間調整部は、γ軸電流指令値Iγ**に基づいて、当該γ軸電流指令値Iγ**の低減調整処理に用いる上記の所定時間t_thを変更する。
(もっと読む)
電気機械装置、移動体、ロボット及び電気機械装置の温度測定法
【課題】電磁コイルの近傍に別個の温度取得手段を取り付けることなく、電気機械装置や電磁コイルの温度を測定する。
【解決手段】電気機械装置10であって、永久磁石200と、電磁コイル100Aと、前記永久磁石の電気角を検知するためのセンサー300と、前記センサーからの信号に基づいて前記電磁コイルをPWM駆動する制御部(240、400)と、前記電気機械装置の温度測定時に前記電磁コイルと直列に接続される抵抗器715と、を備え、前記制御部は、前記駆動部が前記PWM駆動において前記電磁コイルに駆動電圧を印加しない期間において、前記電気抵抗の両端の電圧を測定し、前記電圧を用いて前記電磁コイルの電気抵抗を取得し、前記電磁コイルの電気抵抗を用いて前記電磁コイルの温度を取得する。
(もっと読む)
電動パワーステアリング装置
【課題】モータに負荷トルクが印加された状態でモータ電流が極小化する状況を回避して、モータ制御の安定性を好適に維持することのできる電動パワーステアリング装置を提供すること。
【解決手段】電流指令値演算部61は、演算周期毎に、目標操舵トルクτ*と実際の操舵トルク(τ)との間のトルク偏差Δτに基づいてγ軸電流増減値ηを演算するγ軸電流増減値演算部71と、当該γ軸電流増減値ηを積算する積算制御部72とを備える。そして、電流指令値演算部61は、そのγ軸電流増減値ηの積算値をγ軸電流指令値Iγ*とする。また、電流指令値演算部61は、γ軸電流増減値ηを補正する増減値調整演算部73を備えるとともに、同増減値調整演算部73は、車両が直進状態にあるか否かを判定する。そして、増減値調整演算部73は、車両が非直進状態にあると判定した場合には、γ軸電流増減値ηを「0」に補正して積算制御部72に出力する。
(もっと読む)
直流ブラシレスモータの回転方向同定方法及び同定装置
【課題】結線管理を不要にして誤結線を解消可能とした直流ブラシレスモータの回転方向同定方法及び同定装置を提供する。
【解決手段】駆動装置から電圧が印加されるステータコイルと、永久磁石を有するロータと、を供えた多相直流ブラシレスモータの回転方向同定方法及び同定装置において、ロータを外部から一方向に回転させたときにステータコイルに発生する逆起電力の順序を駆動装置10内のCPU11が検出し、そのときのロータの回転方向を、CPU11が正転方向として同定する
(もっと読む)
モータ制御装置
【課題】バッテリなど一定電力を供給する車両のシステムにおいて、モータに過大な電流供給があった場合、モータ電流指令値に制限をかけるとモータ電流の制限に遅れが発生し、電流制御の応答性に課題があった。
【解決手段】モータ1に与える電流指令値とモータ電流とに基づいてモータを駆動するためのモータ電圧指令値を算出するモータ電圧指令値演算手段12と、モータに供給する電源電圧を検出する電源電圧検出手段7と、電源電圧とモータ回転速度から、U相、V相、W相の各相モータ電圧指令値を制限する相電圧指令制限値を算出するモータ電圧指令制限値算出手段13と、相電圧指令制限値によって、モータ電圧指令値を制限するモータ電圧指令値制限手段14とを備え、モータ電圧指令値に制限をかけることにより電流制御の応答性を早めた。
(もっと読む)
パワーステアリング装置
【課題】アイドルストップ機能を有する自動車に搭載されるパワーステアリング装置において、電動モータが発電状態となったときに発生する起電力から電動モータ駆動用のインバータを保護しつつ、アイドルストップ中の消費電力を低減する。
【解決手段】アイドルストップ中であるか否かを判定するアイドルストップ状態判定手段(ステップS106,107)と、上記電動モータが発電状態にあるか否かを判定する発電状態判定手段(ステップS102)と、を設け、アイドルストップ状態判定手段がアイドルストップ中でないと判定している場合、少なくとも上記電動モータが発電状態にあると上記発電状態判定手段が判定しているときに弱め界磁制御を行う一方、上記アイドルストップ状態判定手段がエンジンの自動停止中であると判定している場合には弱め界磁制御を停止する。
(もっと読む)
電動機駆動装置
【課題】推定開始時の回転子磁束位置誤差がπ/2または3π/2の近傍にある場合でも、推定時間が延びることなく回転子磁束位置を正確に推定する。
【解決手段】実施形態によれば、回転子磁束位置を推定するためにD軸電圧指令に高周波電圧を印加する。回転子磁束位置推定手段は、電流検出手段により得られるQ軸高周波電流またはD軸およびQ軸高周波電流を用いて回転子磁束位置誤差を求め、その値を正負により符号化した回転子磁束位置誤差符号に基づいて回転子磁束位置誤差が0となるように第1の収束演算を実行し、その後、回転子磁束位置誤差を入力とするPI補償演算により回転子磁束位置誤差が0となるように第2の収束演算を実行する。
(もっと読む)
ブラシレスモータの制御装置
【課題】モータの停止中に回転子が微動した場合やノイズ等が発生した場合でも、モータ駆動信号生成が誤動作するのを防止できるブラシレスモータの制御装置を提供することにある。
【解決手段】センサ信号処理回路14は、ホールIC24U,24V,24Wにより検出されたブラシレスモータ20の3相の磁極位置検出信号HU,HV,HWの内、2つの磁極位置検出信号を入力信号とし、該2つの入力信号がそれぞれH,Lを繰り返すときには、第1の出力信号sigAは、そのH,Lの繰り返しに応じて、H,Lを繰り返す信号を出力し、第2の出力信号sigBは、H又はLの一定レベルを出力し、第1の入力信号がH,Lを繰り返すが、第2の入力信号はH又はLの一定レベルのときは、第1及び第2の出力信号は、H又はLの一定レベルを出力する。
(もっと読む)
ブラシレスモータを運転する方法
モータ制御装置
【課題】 スイッチング動作を変化させることなく、リンギングノイズ影響を回避した電流検出ができるモータ制御装置を提供する。
【解決手段】 電流制御装置は、上アームスイッチ16と下アームスイッチ17のうちデューティ比が大きい側のアームスイッチがオンしているオン区間において相電流センサ73によりブラシレスモータ50のモータライン18に流れる電流値を検出または推定する3相-2相変換部74を備える。
(もっと読む)
1 - 20 / 72
[ Back to top ]