
Fターム[5H560XA10]の内容
無整流子電動機の制御 (40,007) | 制御方式 (6,312) | ループゲイン/リミッタ値の変更 (106)
Fターム[5H560XA10]に分類される特許
1 - 20 / 106
駆動装置及びそれを備えた画像形成装置
【課題】画像品質を向上させることができる駆動装置及びそれを備えた画像形成装置を提供する。
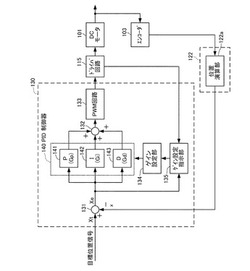
【解決手段】駆動装置は、位置・速度追従制御器130を備え、位置・速度追従制御器130は、PID制御器140と、減算器131と、PWM回路133と、ゲイン設定部134と、ゲイン設定指示部135と、を備え、ゲイン設定指示部135は、DCモータ101がホールド状態になった時刻以降において、位置偏差が予め定められた閾値以下、かつ、一定時間経過後に、ゲイン設定部134にホールド時ゲインを設定させ、スルーアップ制御が開始された場合に、ゲイン設定部134に駆動時ゲインを設定させる構成を有する。
(もっと読む)
電動パワーステアリング装置

【課題】電動モータのトルクが伝達されるラックが可変比ラックである電動パワーステアリング装置において、操舵状況に応じた適切な操舵補助を実現できる電動パワーステアリング装置を提供する。
【解決手段】q軸電流指示値生成部は、現在のラック軸位置におけるアシスト側ラックゲインGaを求める。次に、q軸電流指示値生成部は、操舵トルクとアシスト側ラックゲインGaがラックゲイン基準値Gaoである場合のq軸電流指示値(基準q軸電流指示値Iqo*)との関係を記憶したマップを用いて、操舵トルクTに応じた基準q軸電流指示値Iqo*を求める。次に、q軸電流指示値生成部は、基準q軸電流指示値Iqo*を、アシスト側ラックゲインGaに対応したq軸電流指示値Iq*に変換する。
(もっと読む)
モータ制御装置およびモータ制御方法
【課題】パルス幅変調制御方式によるPWM制御モードと、矩形波制御方式によるワンパルス制御モードとを有するモータ制御装置において、パルス幅変調制御方式と矩形波制御方式とを通じて適切に電流オフセットを抑制できるようにする。
【解決手段】低周波成分抽出部151は、インバータ168がモータMに供給する電流のうち低周波成分を抽出する。また、ゲイン設定部140は、低周波成分抽出部151が抽出した低周波成分に作用させるゲインを、PWM制御モードにおけるゲインが、ワンパルス制御モードにおけるゲインよりも小さくなるように設定する。そして、オフセット補正部165は、低周波成分抽出部151が抽出した低周波成分に、ゲイン設定部140が設定したゲインを作用させて得られるオフセット補正指令値に基づいて、インバータ168がモータMに供給する電流のオフセットを低減させるオフセット補正を行う。
(もっと読む)
ブラシレスモータの駆動装置
【課題】ブラシレスモータの脱調を抑制する。
【解決手段】複数の巻線を備えたブラシレスモータの各相に対するパルス電圧の通電モードを切り替えることで、ブラシレスモータを回転駆動するブラシレスモータの駆動装置は、非通電相の電圧(誘起電圧)と電圧閾値とに基づいて通電モードを順次切り替える(S36〜S40)。また、ブラシレスモータの駆動装置は、パルス電圧の印加直後に現われる誘起電圧の振れを検出しないように、PWM制御のデューティ比の下限値を設定すると共に(S33)、誘起電圧が低下しないように、通電モードの切り替えタイミングにおける誘起電圧変化と電圧閾値に基づいてデューティ比の上限値を設定する(S34)。そして、デューティ比をその上限値及び下限値で画定される範囲内に規制することで、ブラシレスモータの脱調を抑制する。
(もっと読む)
駆動装置及びそれを備えた画像形成装置
【課題】ホールド制御時に発生するモータ振れを従来のものよりも短時間で抑制することができる駆動装置及びそれを備えた画像形成装置を提供する。
【解決手段】駆動装置は、位置・速度追従制御器130を備え、位置・速度追従制御器130は、PID制御器140と、減算器131と、PWM回路133と、ゲイン設定部134と、ゲイン設定指示部135と、位置偏差補正部136と、を備え、ゲイン設定指示部135は、減算器131が出力する位置偏差が予め定められた±eパルス相当であり、かつ、その位置偏差がホールド状態になったホールド時から予め定められたt時間継続した場合は、ゲイン設定部134に、位置偏差をキャンセルするために予め実験により取得されたホールド時ゲインを設定させる構成を有する。
(もっと読む)
ブラシレスモータの駆動装置
【課題】ブラシレスモータにおける脱調の発生を抑制する。
【解決手段】3相ブラシレスモータの2相に通電する通電モードを非通電相に誘起される誘起電圧に基づいて切り替えるブラシレスモータの駆動装置において、目標回転速度に応じたPWM信号のデューティ比である目標デューティ比Dtが誘起電圧を検出可能なデューティ比の下限である検出限界値Dlim未満となった場合に、PWM信号の周期に応じて誘起電圧を検出するための検出タイミング(1/N)を設定し(S349)、検出タイミングにおけるPWM信号のデューティ比である検出時デューティ比D1をDlimに制限する(S350)。また、連続する検出タイミング間において、Dlimに制限された検出時デューティ比D1と、誘起電圧を検出しないときの非検出時デューティ比D2〜DNと、を加算平均した平均デューティ比がDtに近づくようにD2〜DNを設定する(S351)。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】高い静粛性を確保しつつ、より安定的にレゾルバレス制御を実行することのできるモータ制御装置を提供すること。
【解決手段】F/B制御部47は、F/Bゲイン可変制御部80が演算するフィードバックゲインを用いて、トルク偏差Δτに基づくトルクフィードバック制御を実行することにより第1変化成分dθτを演算する。また、F/Bゲイン可変制御部80は、第1変化成分dθτを加算角θaとする「第1の演算モード」、及び第1変化成分dθτを推定モータ回転角速度ωm_eにより補正した値を加算角θaとする「第2の演算モード」の各演算モードに応じて、二種類の異なるフィードバックゲインK1,K2を演算する。そして、第1の演算モードに用いるフィードバックゲインK1は、第2の演算モードに用いるフィードバックゲインK2との比較において、より応答性が高くなるように設定される。
(もっと読む)
3相回転機の制御装置
【課題】 2組の巻線組を有する3相回転機の駆動を制御する制御装置において、相電流検出値のみを用いて、インバータまたは巻線組の故障を検出する。
【解決手段】 第1系統インバータ601および第2系統インバータ602は、それぞれ3相モータ80を構成する2組の巻線組801、802に、振幅が互いに同一で、位相が互いに30°ずれる交流電流を供給する。電流検出器701、702は、インバータ601、602から巻線組801、802に通電される相電流を検出する。故障判定手段751、752は、互いに他系統の3相電流検出値に基づいて、自系統の相電流推定値を算出し、電流検出値と比較する。これにより、ECU101は、電流検出器701、702からの情報である相電流検出値のみを用いて、インバータ601、602または巻線組801、802の故障を検出することができる。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】非干渉化制御を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置および電動パワーステアリング装置を提供する。
【解決手段】モータ(1)の回転角度を微分してモータ回転角速度を演算するモータ回転角速度演算手段(60)と、そのモータ回転角速度を信号処理するローパスフィルタ(63)を有する。そして、モータの回転角度と、ローパスフィルタのゲインの関係を示すマップ(61)から演算された値により、ローパスフィルタ(63)のゲインを変更するローパスフィルタゲイン変更手段(80)を有する。そして、ゲインが変更されたローパスフィルタ(63)に基づいて出力されるモータ回転角速度に基づき、モータの逆起電力により発生する電流を相殺するように、モータに電流を流す非干渉制御を実行する。
(もっと読む)
電動車両
【課題】電動機の回転軸の回転角を検出するセンサに角度ズレが生じていても、電動機の予期しない回生制動を回避して、二次電池の過充電をより確実に抑止する。
【解決手段】d軸にマイナス方向の電流Idを流すと共にq軸に電流が流れないように電流指令Id*,Iq*を設定してモータを制御する際には、制御に用いる回転角センサからの回転角θをモータの正転時には逆転方向に補正し、モータの逆転時には正転方向に補正することにより、回転角θを回生から力行に向かう方向に補正する。これにより、回転角センサにオフセット誤差が含まれていても、補正した回転角θに基づいてモータMG2を制御することにより、q軸にモータMG2の回転方向とは逆方向の電流が流れない、即ち回生トルクが出力されないようにすることができる。この結果、モータが予期せずに回生するのを防止でき、二次電池の過充電を抑止することができる。
(もっと読む)
電動パワーステアリング装置
【課題】3相電動モータで1相に異常が発生したときに、操舵フィーリングを悪化させることなく、残りの2相を用いてモータ駆動を継続できる電動パワーステアリング装置を提供する。
【解決手段】異常検出手段で各相コイルのうちの1相の駆動系統に通電異常を検出したとき、異常時モータ指令値算出手段34で、操舵補助電流指令値Irefに基づいて残りの2相のコイルを使用する異常時相電流指令値を算出し、その異常時相電流指令値に基づいて3相電動モータ12を駆動する。その際、操舵トルク及び前記3相電動モータ12で発生する操舵補助トルクの和と外力との釣合い時に、前記異常時相電流指令値を低下させる電流指令値補正手段を備えている。
(もっと読む)
インバータ制御装置および車両
【課題】矩形波制御から過変調制御に切り替えた後のモータのトルク変動を抑制する。
【解決手段】過変調制御によってインバータを制御するときに、d軸,q軸の電流Id,Iqと電流指令Id*,Iq*との差分と比例項,積分項の制御ゲインと積分項の積分区間とを用いた電流フィードバック制御によってd軸,q軸の電圧指令Vd*,Vq*を設定してインバータを制御するものにおいて、矩形波過変調切替時に、矩形波過変調切替によるモータのトルク変動が大きくなりやすい変動想定状態のときには(S110,S120)、変動想定状態でないときに比して比例項,積分項のゲインを大きくすると共に積分項の積分区間を短くする(S140)。
(もっと読む)
モータ制御装置
【課題】非干渉化制御を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】モータ(1)の回転角度を微分してモータ回転角速度を演算するモータ回転角速度演算手段(60)と、そのモータ回転角速度を信号処理するローパスフィルタ(65)を有する。そして、モータ回転角速度を更に微分してモータ回転角加速度を演算するモータ回転角加速度演算手段(61)と、モータ回転角加速度演算手段(61)により演算された値により、ローパスフィルタ(65)のゲインを変更するローパスフィルタゲイン変更手段(80)を有する。そして、ゲインが変更されたローパスフィルタ(65)に基づいて出力されるモータ回転角速度に基づき、モータの速度起電力により発生する電流を相殺するように、モータ電圧指令値を定める非干渉制御を実行する。
(もっと読む)
ロボット及び移動体
【課題】供給電圧の変更に柔軟に対応可能なモータ制御技術を提供する。
【解決手段】駆動制御回路(200)は、電磁コイルに供給電圧VSUPを断続的に供給するためのドライバ回路(250)と、ドライバ回路(250)に供給するスイッチング信号を生成するスイッチング信号生成回路(240)と、供給電圧指令値Yaをスイッチング信号生成回路(240)に供給する電圧設定部(270)とを備える。スイッチング信号生成回路(240)は、供給電圧指令値Yaに応じてスイッチング信号DRVA1,DRVA2のパルス幅を調整することによって、電磁コイルに印加される実効電圧を調整する。
(もっと読む)
モータ制御装置
【課題】電圧指令値の制限を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】PI演算値を演算するためのPI制御部と、モータの非干渉化制御のための非干渉化制御量を演算するための非干渉化制御量演算部と、PI制御手段により演算されたPI演算値と、非干渉化制御量演算部により演算された非干渉化制御量とを加算する加算部と、加算部の加算結果を制限し、制限した制御量をモータ電圧指令値として出力するリミッタと、モータの回転角速度と所定のゲインマップに基づき、目標電流ゲインを演算するゲイン演算部とを備え、ゲイン演算部によって演算された目標電流ゲインをdq軸目標電流に乗じて、モータのdq軸目標電流を制限する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】モータ制御の安定性を損なうことなく、効果的にモータ電流を抑制することのできるモータ制御装置を提供すること。
【解決手段】電流指令値制限部74は、電流指令上限値演算部73が演算する電流指令上限値Ilim以下にγ軸電流指令値を制限する。また、電流指令上限値演算部73に設けられた切替制御部75は、演算周期毎のモータ回転角変化量に相当する加算角の基礎成分、即ちトルク偏差Δτに基づく第1変化成分dθτ、及びモータの回転により生ずる誘起電圧(誘起電圧二乗和Esq_αβ)に基づいて、モータの制御状態が安定的であるか否かを判定する。そして、切替制御部75は、その制御状態が不安定であると判定した場合には、上記電流指令上限値Ilimを、当該制御状態が安定的である場合の値(Ilim_a)よりも高い値(Ilim_b)に変更すべき旨を決定する。
(もっと読む)
モータ駆動制御装置
【課題】モータを起動させる際、風等の影響を受けてモータが正方向または逆方向のどちらかに回転している状態にあっても、モータを確実に起動させることができるモータ駆動制御装置の提供。
【解決手段】回転方向検知部2は、モータ51起動直前の回転方向を検知する。駆動電圧調整部5は、回転方向検知部2により検知されたモータ51起動直前における回転方向に応じて、モータ51起動時の駆動電圧SU1,SV1,SW1が、モータ51が無回転の状態で起動する場合にモータ51に出力される所定駆動電圧と異なるように調整する。特に、駆動電圧調整部5は、モータの起動直前の回転方向に応じて、モータ51の回転数を制御するための制御パラメータを、モータ51が無回転の状態で起動する時に用いられる所定制御パラメータと異なるように調節し、調節された制御パラメータに基づいてモータ起動時の駆動電圧を更に調整することで、モータ起動時の駆動電圧が所定駆動電圧と異なるように調整する。
(もっと読む)
モータ制御装置、これを用いた圧縮機駆動装置及びこれを用いた冷凍機器
【課題】位置フィードバック運転モード中に必要トルクが急激かつ大きく変化した場合に発生する速度変動を抑制し、必要トルクの変化に対して一様な安定性を持つ制御構成を提供することを目的とする。
【解決手段】モータのトルクに係る電気量を演算する演算手段と、電流指令値を入力とする電流制御器と、前記電流制御器の出力を入力とする電圧指令値作成器と、前記電圧指令値作成器の出力に従って永久磁石モータに電圧を印加する電力変換回路とを備えたモータ制御装置において、位置フィードバック運転モード中にモータのトルクが変化あるいは安定するタイミングをトリガとし、そのトリガに合わせて、変化後のトルクに比例する値を基に、前記演算手段と前記電流制御器のうち少なくとも1つに係る電気量を設定する。
(もっと読む)
電動機駆動装置
【課題】推定開始時の回転子磁束位置誤差がπ/2または3π/2の近傍にある場合でも、推定時間が延びることなく回転子磁束位置を正確に推定する。
【解決手段】実施形態によれば、回転子磁束位置を推定するためにD軸電圧指令に高周波電圧を印加する。回転子磁束位置推定手段は、電流検出手段により得られるQ軸高周波電流またはD軸およびQ軸高周波電流を用いて回転子磁束位置誤差を求め、その値を正負により符号化した回転子磁束位置誤差符号に基づいて回転子磁束位置誤差が0となるように第1の収束演算を実行し、その後、回転子磁束位置誤差を入力とするPI補償演算により回転子磁束位置誤差が0となるように第2の収束演算を実行する。
(もっと読む)
制御定数の決定方法及び電動機制御装置
【課題】矩形波制御のトルクリップルへの対応を考慮するとともに、電動機のトルクフィードバック制御系の安定性及び応答性を考慮した、制御定数の決定方法を提供する。
【解決手段】トルクフィードバック制御器は、トルク指令値に対する、ローパスフィルタの処理を行った電動機の出力トルクのトルク偏差を算出し、比例積分制御を行って電圧位相を算出する制御器であり、電圧位相の変化に対する出力トルクの傾きであるトルク位相傾きを電動機の伝達関数と決定するステップと、一巡伝達関数のゲイン余裕及び位相余裕が確保されるような積分ゲインの第一の決定条件を導出するステップと、閉ループ伝達関数の応答性が、所定の応答性以上に速くなるような積分ゲインの第二の決定条件を導出するステップと、積分ゲインを、第一の決定条件及び第二の決定条件の双方を満たすように決定するステップと、を備える。
(もっと読む)
1 - 20 / 106
[ Back to top ]