
Fターム[5H571HD02]の内容
直流電動機の制御 (7,041) | 直流電動機の制御手段 (447) | 供給電圧を制御するもの (441) | チョッパ装置を用いるもの (324)
Fターム[5H571HD02]に分類される特許
1 - 20 / 324
電動パワーステアリング用モータの故障診断装置
圧電素子用駆動回路
モータ駆動装置
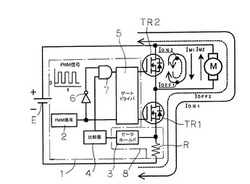
【課題】従来の装置は、回生電流の吸収機能が無い電源装置に使用することができないという問題点があった。
【解決手段】直流電源EとモータMとの間に接続した第1トランジスタTR1と、モータMに対して並列に接続した第2トランジスタTR2と、第1及び第2のトランジスタTR1,TR2をPWM制御する制御手段1を備え、制御手段1が、モータMの電流を検出するモータ電流検出手段8、及びモータ電流検出手段8の検出値とゼロを含むプラス側の電流の閾値とを比較する比較手段4を含むと共に、検出値が閾値以上である場合には第2トランジスタTR2をオンにし且つ検出値が閾値未満である場合には第2トランジスタTR2をオフにする回生対応機能を有する構成としたことで、回生電流による過電圧状態を未然に阻止し、回生電流の吸収機能が無い電源装置にも適用可能にした。
(もっと読む)
モータ駆動制御装置

【課題】例えばシートベルトリトラクタに設けられたモータの回転駆動を制御するモータ駆動制御装置において、スイッチング素子のスイッチング直後に発生する貫通電流に起因する高周波ノイズを低減すると共に、スイッチング素子における発熱を抑制する。
【解決手段】スイッチング素子に流れる電流をモータ21に供給することによってモータ21を回転駆動させるモータ駆動制御装置22は、スイッチング素子307,308のオン抵抗値を可変設定する可変設定手段を備えており、貫通電流が発生するタイミングではオン抵抗値を高く設定し、この貫通電流を抑制して高周波ノイズを低減すると共に、貫通電流が流れ終わった後はオン抵抗値を低く設定し、スイッチング素子307,308における発熱量を抑制する。
(もっと読む)
モータ制御装置及び画像形成システム
【課題】駆動対象の速度を高精度に制御する。
【解決手段】モータ制御ユニットは、エンコーダを用いて計測された駆動対象の速度Vがゼロより大きくなることで、駆動対象10の変位を検知するまでは、操作量Uを漸次増加させ(S140)、駆動対象10の変位を検知した後、駆動対象の加速度Aが高い期間は、操作量Uを漸次減少させる(S160)。そして、駆動対象の加速度Aが所定条件を満足すると(S150でYes)、フィードバック制御を開始し、目標速度Vrと駆動対象10の速度Vとの偏差に基づき、操作量Uを算出する(S190)。この際、目標速度Vrの軌跡は、フィードバック制御開始時点での目標速度Vrが、その時点での駆動対象の速度Vと一致し、この時点での目標速度Vrの一階時間微分である目標加速度Arが、この時点での駆動対象の加速度Aに略一致する軌跡に設定される。
(もっと読む)
モータ制御装置
【課題】加速を迅速に行いつつ、加速後の速度制御を高精度に実行可能とする。
【解決手段】モータの駆動初期においては、モータドライバに上限電圧値V1に対応する電圧指令値U=V1を入力することによって、モータを最大能力で駆動させる。そして、モータの回転速度ωが閾値速度ωchに到達すると、モータドライバに入力する電圧指令値Uを、値V1から漸次減少させる。そして、電圧指令値Uが、予め設定されたフィードバック制御への切替タイミングを規定する電圧指令値Uconvに到達すると、モータ制御をフィードバック制御に切り替える。そして、電圧指令値Uconvについては、標準の電圧指令値Uconv*と、この電圧指令値Uconv*が前提とする逆起電力定数Ke*と、フィードバック制御開始時の目標速度ωcと、モータの動作態様から特定した逆起
電力定数Keとに基づき、値Uconv*−Ke*・ωc+Ke・ωcに設定する。
(もっと読む)
電気機械の制御
【課題】電気機械の制御を提供する。
【解決手段】本発明による電気機械を制御する方法は、複数のパワーマップを格納する段階を有する。複数のパワーマップの各々は、異なる作動速度範囲にわたって異なる電力で電気機械を駆動するための制御値を含んでいる。本発明による方法は、さらに、入力信号に応答してパワーマップを選択する段階と、選択されたパワーマップの制御値によって定められた時間に、前記電気機械の巻線を励起する段階と、を有する。好ましくは、各パワーマップは、異なる電圧に対する異なる制御値を格納するルックアップテーブルを含む。
(もっと読む)
モータ駆動装置
【課題】モータを適正に動作させることができ、かつ、電流検出用抵抗による電力損失を小さくできるモータ駆動装置を提供する。
【解決手段】モータ駆動装置1は、直流電源Vccに接続されている制御回路部10と、電流検出経路50を構成する電流検出用抵抗R1及びインダクタL0と、比較器20とを備え、制御回路部10からモータ2に駆動電力を供給する。電流検出用抵抗R1は制御回路部10に接続されており、インダクタL0は電流検出用抵抗R1と直流電源Vccの負電極との間に接続されている。電流検出経路50は、モータ2の駆動電力に応じた検出電圧を検出する。検出電圧と基準電圧との比較結果が比較器20から制御回路部10に出力され、それに応じてモータ2が制御される。電流検出経路50として電流検出用抵抗R1のみが設けられている場合と比較して、インダクタL0の直流分の抵抗値だけ電流検出用抵抗R1の抵抗値を小さくできる。
(もっと読む)
直流モーター制御装置、電動日射遮蔽装置及び直流モーター制御方法
【課題】AC/DCコンバーターで直流モーターに直流電圧を供給し、そのAC/DCコンバーターの出力電圧に基づいて動作するDC/DCコンバーターでマイコンに直流電圧を供給する直流モーター制御装置において、消費電力を低減しながら、安定した直流電圧を生成し得る直流モーター制御装置を提供する。
【解決手段】待機モード時に、マイコン9から出力される電圧切替信号Xに基づいて、AC/DCコンバーター1からDC/DCコンバーター15に供給する第一の直流電圧Vdc2を低下させる電圧調整部3,4,8と、待機モード時に、マイコン9から出力される制御信号DV1に基づいて、第一の直流電圧Vdc2のモーター駆動回路7への供給を遮断するスイッチ12とを備えた。
(もっと読む)
モータ駆動装置
【課題】モータのロック保護状態が解除された場合の再起動時においても、簡易的かつ安価な回路構成でモータのソストスタート制御が可能なモータ駆動装置を提供する。
【解決手段】モータ駆動装置1は、モータ2を駆動する駆動電流Icの向きを制御する制御回路部10と、駆動電流Icを検出する電流検出回路3と、モータ2の回転数を定常回転数まで増加させる起動時に、駆動電流Icの増加速度を電流検出回路3と協働して抑制する電流制限調整回路20と、モータ2の回転が抑制されたロック状態にモータ2がなった場合に、電流制限調整回路20をリセットするソフトスタート補助回路30とを備えている。制御回路部10は、モータ2がロック状態になった場合に、駆動電流Icを減少させることによりモータ2をロック保護状態にし、モータ2のロック保護状態が解除された場合の再起動時に、ソフトスタート補助回路30は駆動電流Icの増加速度を電流制限調整回路20に抑制させる。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】演算用モータ抵抗値の算出精度を向上させることができるモータ制御装置及び電動パワーステアリング装置を提供する。
【解決手段】モータ12を制御するECU11は、モータ12に流れる電流検出値Ieを検出する電流値検出部31と、モータ12に印加される端子間電圧Vtを取得する入力電圧設定部37と、電流検出値Ie及び端子間電圧Vtに対してフィルタ処理を施すフィルタ部40と、モータ12で発生する誘起電圧Eを算出する誘起電圧推定部43と、デューティ比微分値ΔDを算出する変化量算出部41と、フィルタ後電圧値Vtfをフィルタ後電流値Iefで除算してモータ12の今回の抵抗算出値Re(n)を求める抵抗算出部72と、誘起電圧Eが基準値以下であると共に、デューティ比微分値ΔDが基準変化量以下である場合に、今回の抵抗算出値Re(n)に基づき今回の演算用モータ抵抗値R(n)を設定する抵抗設定部73と、を備える。
(もっと読む)
電動機制御装置
【課題】電動機の制御停止中に外力によって電動機が回転した場合に、電動機で発生した誘起電圧により駆動回路が破壊されるのを防止する。
【解決手段】電動機制御装置1は、モータ21を駆動する駆動回路10と、バッテリ3と駆動回路10との間に設けられ、ONすることによりバッテリ3から駆動回路10へ電流を供給し、OFFすることにより該電流を遮断するリレー7と、モータ21の回転数を検出する回転数検出部6と、駆動回路10を動作させて、モータ21を制御する制御部4とを備える。制御部4は、モータ21の制御停止中に、回転数検出部6により検出したモータ21の回転数が所定値以上である場合に、リレー7の接点7bをONする。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】ブラシ付きのモータに対する電流の目標値の大きさに関係なく該モータで発生する誘起電圧を算出できると共に、該誘起電圧の算出精度を向上させることができるモータ制御装置及び電動パワーステアリング装置を提供する。
【解決手段】モータ12を制御するECU11は、モータ12に対する電流目標値Itを設定する電流目標値設定部30と、電圧センサ23からの検出信号に基づき電圧検出値Vdを検出する電圧検出部50と、バッテリ24の電源電圧Vpsに基づき電圧推定値Veを算出する電圧算出部51と、電流目標値Itが「0(零)」以外の値に設定される場合には電圧推定値Veに基づいた端子間電圧Vtを用いてモータ12で発生する誘起電圧Eを算出する一方、電流目標値Itが「0(零)」に設定される場合には電圧検出値Vdに基づいた端子間電圧Vtを用いて誘起電圧Eを算出する誘起電圧オブザーバ38と、を備えている。
(もっと読む)
モータ制御装置
【課題】エンコーダ等のセンサを用いることなく、イニシャライズ時の突き当て荷重を効果的に低減することが可能なモータ制御装置を提供することを目的とする。
【解決手段】エアコンのエアミックスダンパ(以下「ダンパ」)を直流モータで駆動するシステムにおいて、直流モータは、一対のブラシ間のインピーダンスが回転に伴って周期的に変化する構成である。また、一対のブラシ間には交流電圧が重畳して印加されるよう構成されている。そこで、直流モータの電流から交流成分を検出し、その振幅変化に基づいて回転パルスSpを生成する。イニシャライズ開始後、ダンパがユニット端面に突き当たると(時刻t1)、回転パルスSpの周期は突き当たる前の周期(18msec)から上昇していく。そこで、周期閾値を例えば24msecに設定し、回転パルスSpの周期が周期閾値を超えたら、ダンパのユニット突き当てを判断してモータにブレーキをかける。
(もっと読む)
Hブリッジ駆動回路
【課題】PWM制御では、高周波のノイズが発生する場合があり、必要に応じてPWMモードを回避する。
【解決手段】直列接続された上側トランジスタQP1、QP2と下側トランジスタQN1、QN2からなるアームを2つ有し、両アームにおける上側および下側トランジスタの接続点を一対の出力端として、ここに接続されるコイルに順方向および逆方向の電流を供給するHブリッジ駆動回路であって、ハイインピーダンス回路10−1、10−2の出力により、出力トランジスタQP1,QP2をオンオフするPWMモードと、オペアンプOPの出力により、出力端OUT1、OUT2の電圧を制御する定電圧モードを有し、切り換え信号STBBによってこれを切り換える。
(もっと読む)
直流モータ回転制御装置
【課題】モータの逆起電圧を用いて回転制御する際に、従来のモータドライバーを利用して印加電圧を制御できるモータ回転制御装置を提供すること。
【解決手段】ブリッジ回路1、モータ駆動回路2、差電圧検出回路3及び電圧制御回路4を備える。ブリッジ回路1は三辺に各々抵抗を有し、一辺に直流モータを有する。モータ駆動回路2は、直流モータMと第1抵抗Rsの直列接続に直流電圧を印加する。差電圧検出回路3は、直流モータと第1抵抗の接続点VM、第2抵抗と第3抵抗の接続点E1の差電圧Ebを検出する。電圧制御回路の基準電圧指令部41は目標回転数Nmで定まる基準電圧Vctlを出力する。電圧減算部42は基準電圧から差電圧の絶対値を差し引く。この電圧に基づくPWM信号を発生して、モータ駆動回路2がこのPWM信号のデューティ比に応じた直流電圧Vccをブリッジ回路1に供給する。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】モータパルスに基づいてモータの回転速度や回転方向を制御するモータにおいて、パルスの分解能を上げモータ速度や反転位置の制御精度を向上させる。
【解決手段】ワイパ駆動制御装置は、ホールIC17a,17bと接続されたCPU22を有する。CPU22には、ホールICからブレードの絶対位置信号、ホールIC17a,17bからA相パルス信号Sp1,B相パルス信号Sp2が入力される。CPU22には、パルス信号Sp1に基づいてモータ回転数を算出するモータ回転数検出部41と、モータ回転数の高低を判定する回転数判定部43、モータ回転数に応じて制御に使用する信号を選択する信号選択部44を有する。信号選択部44は、高回転領域ではパルス信号のうち一方のみがモータ回転数検出部41に入力されるように規制し、モータ回転数検出部41は、一方のパルス信号のみを用いてモータ回転数を算出する。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータの電気的抵抗が精度良く推定することが可能となる電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置は、電動モータ20の電気的抵抗の推定値に基づいて同電動モータ20の回転速度を算出する。そして、舵角センサ54の出力が舵角一定条件を満たすとき、かつ、電動モータ20の誘起電圧が誘起電圧一定条件を満たすとき、電動モータ20の電気的抵抗の推定値を推定して更新する。
(もっと読む)
電動パワーステアリング装置
【課題】 ブラシ付モータ20のブラシの位置ずれを検出する。
【解決手段】 位置ずれ検出部80は、モータ実電流Imとモータ端子間電圧Vmと回転角速度ωとに基づいて、モータ20の逆起電圧定数Keを計算し、そのデータ(Ke,Im)をサンプリングする(S31〜S34)。そして、電流方向別にモータ実電流Imに対する逆起電圧定数Keの特性を表す近似式を計算し(S35)、プラス方向のモータ実電流Imに対する逆起電圧定数Keの近似式の1次係数A1と、マイナス方向のモータ実電流Imに対する逆起電圧定数Keの近似式の1次係数A2のとの偏差ΔAが判定基準値Arefを超える場合に、ブラシの位置ずれが生じていると判定する(S39)。
(もっと読む)
モータ駆動制御装置及びモータ駆動制御方法
【課題】所定ビットのパルス幅変調によってファンモータを制御する場合において、該所定ビットを超えた分解能によってファンモータを制御する、ことを目的とする。
【解決手段】モータ駆動制御装置10は、回転数検出部20によってファンモータ14の回転数を検出し、制御値算出部30によって検出値とファンモータ14の回転数の目標値との偏差に基づいたファンモータ14に対する制御値を、8ビットの定倍で算出する。そして、モータ駆動制御装置10は、除算部32によって、算出した制御値を定倍の値で除算し、商と余りを算出し、パルス出力部34によって、商に応じたデューティー値のパルスを第1パルスとし、余りに応じたデューティー値のパルスを第2パルスとし、第1パルスと第2パルスとの数を余りに基づいて変化させた、該第1パルスと該第2パルスとの組み合わせを1組として出力する。
(もっと読む)
1 - 20 / 324
[ Back to top ]