
Fターム[5H580AA08]の内容
ステッピングモータの制御 (5,935) | 用途 (642) | 自動車電装品 (60)
Fターム[5H580AA08]に分類される特許
1 - 20 / 60
ステッピングモータ制御装置
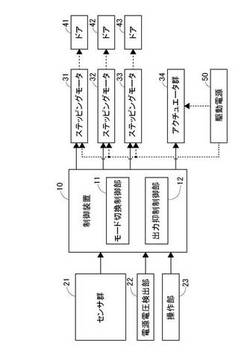
【課題】実効電力を減少させつつ、ユーザに違和感の少ないアクチュエータ機能を実現するステッピングモータ制御装置を提供すること。
【解決手段】ステッピングモータ31〜33の駆動を制御する制御装置10と、制御装置10に含まれ、電源電圧検出部22が検出する電源電圧に基づいて、ステッピングモータ31〜33の駆動モードを、低トルク高速駆動させる通常モードと高トルク低速駆動させる低電圧モードとに切り換えるモード切換制御部11と、モード切換制御部11に含まれ、電源保護条件の成立時には、ステッピングモータ31〜33を同時に複数駆動させる場合、駆動モードを低電圧モードとするとともに、低電圧モードによる低周波の出力信号の少なくとも一部をPWM波形の出力信号とする出力抑制処理を実行する出力抑制制御部12と、を備えていることを特徴とするステッピングモータ制御装置とした。
(もっと読む)
ステッピングモータ装置

【課題】初期化動作中に電源瞬断が複数回発生しても、完全に脱調をリセットできるステッピングモータ装置を提供する。
【解決手段】マイコン4が、瞬断から復帰して電源投入されたとき角度θ(指針の現位置)+α°だけ指針を復帰方向に回転させる。また、マイコン4は、2回目の瞬断から復帰して電源投入されたとき、フルスケール角度だけ指針を復帰方向に回転させる。
(もっと読む)
モータ制御装置
【課題】モータ側の出力軸とレンジ切換機構のマニュアル軸との嵌合連結部に遊びが存在するシステムにおいて、レンジ切換機構の制御精度を確保できるようにする。
【解決手段】予め設定された遊び量(製造ばらつき上限品における嵌合連結部の遊び量θBmax)の1/2に相当する回転角度量(θBmax/2)を補正値として設定し、目標レンジにシフトする際に、目標レンジに対応する目標出力軸回転角θ3tg を設定して、出力軸14aが目標出力軸回転角θ3tg よりも補正値(θBmax/2)だけ余分に回転されるように目標出力軸回転角θ3tg を補正して仮想目標出力軸回転角θ2tg を設定し、出力軸14aの回転角をこの仮想目標出力軸回転角θ2tg に制御する。これにより、ローラ27の駆動停止位置の制御誤差を遊び量最大値θBmaxの1/2以下に抑えることができると共に、遊び量を学習する処理を行う必要がなく、制御回路の演算負荷を軽減することができる。
(もっと読む)
ステッピングモータの制御方法および制御装置
【課題】ロータが初期位置に移動する際の騒音を抑制可能なステッピングモータの制御方法および制御装置を提供する。
【解決手段】制御装置10は、制御回路30および駆動回路40を備えている。制御回路30はCPU31、電流測定部32およびメモリ33を備えており、駆動回路40はモータ駆動部41および電流センシング部42を備えている。ステッピングモータ20の起動時、デューティ比が徐々に大きくなるPWM信号を駆動電圧としてコイルに印加する。よって、ホールド電流は線形に徐々に増加し、急激には増加しない。そのため、ロータが初期位置まで高速で移動することによる振動音あるいは衝撃音等の騒音を抑制できる。
(もっと読む)
モータ制御装置及び脱調状態検出方法
【課題】ステッピングモータの脱調状態の検出精度を改善する。
【解決手段】モータ制御装置10において、制御部は、それぞれ異なる位相のコイル電流が流れる少なくとも2相のコイルと、各相のコイルに流れるコイル電流の位相を周期的に切り替えることで回転するロータと、を有するステッピングモータ20のコイルのそれぞれにパルス幅変調されたパルス電圧を印加する。逆起電圧測定部126は、いずれか1つの相のコイルに流れるコイル電流の向きが切り替わる際に一時的に該コイルへのパルス電圧の印加を停止する停止期間を設けて、該停止期間中に該コイルに誘起される逆起電圧を測定する。脱調状態検出部は、測定された逆起電圧が所定の脱調状態判定基準を充足した場合にステッピングモータ20の脱調状態を検出する。電圧制御部は、停止期間中に、逆起電圧を測定するコイル以外の全てのコイルを固定電圧に設定する。
(もっと読む)
ステッピングモータ装置
【課題】A相、B相コイルとA/Dコンバータとの間のインタフェース部品の削減及び配線上の部品レイアウトや配線レイアウトの自由度向上を図ったステッピングモータ装置を安価に提供する。
【解決手段】マイコンが、検出位相θ2、θ3においてA相コイルの+端子、B相コイルの−端子にグランド電圧を供給すると共にA相コイルの−端子、B相コイルの+端子を開放し、検出位相θ1、θ4においてB相コイルの−端子、A相コイルの+端子に誘導電圧より高い電源電圧を供給すると共にB相コイルの+端子、A相コイルの−端子を開放する。そして、A/Dコンバータには、A相コイルの両端のうち−端子が接続され、B相コイルの両端のうち+端子のみが接続されている。
(もっと読む)
車両用表示システム及びモータ制御装置
【課題】回転子が次の励磁安定点へ移動する途中に表示位置調整用スイッチ及び車両のイグニッションスイッチの少なくともいずれか一方がオフ操作された場合であれ、画像の表示位置に一瞬のずれが生じることを低減することのできる車両用表示システム及びこのシステムに用いられるモータ制御装置を提供する。
【解決手段】ステップモータ12及びモータ制御装置13は、電力を常時供給するバッテリ電源Bに接続されており、モータ制御装置13は、ステップモータ12の回転子の次の励磁安定点へ移動する途中に表示位置調整用SW14及び車両のIGSW5の少なくともいずれか一方がオフ操作されても、ステップモータ12の回転子が次の励磁安定点に達するまで駆動制御する。
(もっと読む)
ステッパモータの停止制御方法
【課題】2相励磁方式のステッパモータにおいて、停止直前に通電していた固定子の巻線と異なる巻線に通電して2相を励磁して回転子を停止する場合に、通電する巻線を変更すると、その変更の際にどの巻線にも通電されない期間が生じるために、回転子を停止させるまでに時間がかかった。
【解決手段】2相を同時に励磁して回転子を回転させ、停止位置に対応する1相を励磁して回転子の停止を行うステッパモータの停止制御方法において、ステッパモータへの停止信号を検知した時点で励磁している2相の励磁を所定期間維持し、その後は、停止のための1相以外の1相の励磁を停止する。
(もっと読む)
メータシステム
【課題】システムを統合しつつも、車両状態値の不正確な指示が発生すること及びユーザが違和感を感じることを低減することのできるメータシステムを提供する。
【解決手段】制御ユニット60は、インジケータ51を点滅させるとともにその点滅に連動してブザー53を吹鳴させるために、フラッシャ半導体スイッチ52及びブザー半導体スイッチ54のオンオフを切替制御している場合には、強制帰零方式のZPD処理を実行する一方、これら半導体スイッチ52及び54のオンオフを切替制御していない場合には、電圧検知方式のZPD処理を実行する。
(もっと読む)
メータシステム
【課題】システムを統合しつつも、車両状態値の不正確な指示が発生すること及びユーザに違和感を与えることを低減することのできるメータシステムを提供する。
【解決手段】メータシステム1では、界磁巻線32及び33と半導体スイッチ52及び54とが同一の基板40上に配置されており、同一の制御ユニット60によって、ZPD処理と半導体スイッチ52及び54の双方のオンオフ切替制御とが実行される。また、制御ユニット60は、高必要性実行条件が成立した場合には、(フラッシャ駆動条件の成立・不成立にかかわらず)ZPD処理を実行する一方、確認的実行条件及びフラッシャ駆動条件が同時に成立していると判断された場合には、半導体スイッチ52及び54のオンオフを切替制御し、これら半導体スイッチ52及び54のオンオフを切替制御している間、ZPD処理を実行しない。
(もっと読む)
車両用指示計器の初期設定方法
【課題】車両用指示計器の正確な初期設定方法を提供すること。
【解決手段】ステップモータMを強制脱調させるために、駆動信号を制御ユニット50に制御させることにより指針20を帰零方向Xへ回転駆動する帰零処理(S101,S102)と、ステップモータMから指針20に至る回転駆動系70に帰零処理中のステップモータMの強制脱調により発生する物理現象を検出し、当該検出時における駆動信号の電気角を脱調電気角θpsとして抽出する脱調検出処理(S102,S103)と、脱調検出処理により抽出された脱調電気角θpsを基準として帰零方向Xとは反対の離零方向Yへ位相が180度ずれた電気角を、制御ユニット50のメモリ52に記憶させる零点θ0として初期設定する零点設定処理(S104,S105)と、を含む。
(もっと読む)
ターボチャージャーの可変ノズル制御装置
【課題】モータの出力軸が機械的ストッパに突き当てられモータの動作が停止したことを速やかに判定する。
【解決手段】可変ノズルを持つターボチャージャーを備えたエンジンの駆動を制御するエンジン制御装置からの制御信号に基づいてモータの回転軸の回転角度を制御することによりターボチャージャーが備える可変ノズルのベーンの開度を制御する電子制御アクチュエータを備えたターボチャージャーの可変ノズル制御装置であって、回転軸の回転角度を検出する角度センサと、所定時間後に、一定速度で回転しているモータの回転軸の回転角度が到達しているべき回転角度を算出する到達予定位置演算手段と、所定時間後に、角度センサの出力値と、到達予定位置演算手段により算出した到達しているべき回転角度の値を比較して、一致していなければ、回転軸が機械的ストッパに突き当たり停止していると判定する判定手段とを備えた。
(もっと読む)
車両用指示計器
【課題】指針回転の正確制御のための車両用指示計器の提供。
【解決手段】ステップモータMに連動して帰零方向Xへ回転する指針20は、零値を指示する零位置から帰零方向Xの所定範囲内のストッパ位置にてストッパ機構Sにより停止させられる。制御ユニット50は、ストッパ位置に対応の電気角の零点θ0と、それから90度ずつ位相のずれた電気角とである検出点θd毎に、ステップモータMの界磁巻線32,33での誘起電圧を検出する。そして、制御ユニット50は、界磁巻線32,33へ印加する駆動信号を制御して指針20を帰零方向Xへ回転させる帰零制御において、零点θ0での設定値超過の誘起電圧と、零点θ0の次の検出点θdでの設定値以下の誘起電圧とを検出する異常検出時に、当該駆動信号を零点θ0まで制御することにより指針20の回転方向を帰零方向Xから反転させる反転制御へ切換える。
(もっと読む)
車両用指示計器
【課題】指針回転の正確制御のための車両用指示計器の提供。
【解決手段】ステップモータMの回転が減速歯車機構Gにより減速伝達されることで帰零方向Xへ回転駆動される指針20は、零値を指示する零位置から帰零方向Xの所定範囲内となるストッパ位置にて、ストッパ機構Sにより停止させられる。制御ユニット50は、ストッパ位置に対応する電気角の零点θ0を含む検出点θd毎にステップモータMの界磁巻線32,33における誘起電圧を検出し、その検出電圧に基づき零点θ0を更新設定する。そして、制御ユニット50は、界磁巻線32,33へ印加する駆動信号の待機点θwからの制御により指針20を帰零方向Xへ回転させる帰零制御に先立ち、駆動信号の折返点θrまでの制御により離零方向Yへ回転駆動した指針20を、駆動信号の待機点θwまでの制御により帰零方向Xへ折返して待機させる折返制御を実施する。
(もっと読む)
車両用指示計器
【課題】消費電力の浪費を軽減する車両用指示計器を提供すること。
【解決手段】燃料残量を回転位置に応じて指示する指針12と、電気角に応じた交流の駆動信号が界磁巻線へ入力されることにより指針12を回転駆動するステップモータ13と、ステップモータ13の界磁巻線へ出力する各駆動信号を制御する計器制御ユニット20とを備えた車両用指示計器1において、計器制御ユニット20は、指針12の回転位置を変化させる変化条件の成立判定を下した場合に、各駆動信号の出力レベルを所定の通常レベルに調整して各駆動信号の電気角を変化させる一方、指針12の回転位置を保持する保持条件の成立判定を下した場合に、各駆動信号の出力レベルを通常レベルよりも抑えた抑制レベルに調整して各駆動信号の電気角を保持する。
(もっと読む)
電気ステッピングモータの作動状態を検出する方法
電気ステッピングモータは、磁気的なロータ及びロータを回転させるための少なくとも2つの電磁的な駆動コイルを備える。電気ステッピングモータの例えばストール状態のような作動状態を検出する方法は、少なくとも1つの電磁的な駆動コイルにおける接続ピン(P,M)の1つを駆動コイルの非作動状態中に高インピーダンス抵抗(R1,R2)を介して所定の電圧源に接続するステップと、非作動状態中の駆動コイルに誘導された電圧を検出して、検出された電圧をデジタル信号に変換するステップと、デジタル信号をデジタル処理で解析し、デジタル信号の正及び負の成分を含む信号波形の評価によって、ロータの作動状態を導出するステップと、を備える。  (もっと読む)
(もっと読む)
電動アクチュエータシステム
【課題】イニシャライズに要する時間を短縮可能とする電動アクチュエータシステムを提供することにある。
【解決手段】回転基準位置が予め定められた回転範囲の間の原点位置に位置合わせされた条件で、回転基準位置を回転範囲の間の所望の位置に制御する位置制御と、回転基準位置が原点位置からズレた時に、電動モータ110を最初に所定方向に回転させて、回転基準位置を原点位置に合わせるイニシャライズ制御とが制御手段120によって実行される電動アクチュエータシステムにおいて、原点位置から、所定方向とは逆方向に予め定められた所定量だけ離れたイニシャライズ準備位置を設け、制御手段120は、イニシャライズ制御を実行する前に、回転基準位置をイニシャライズ準備位置に移動させるイニシャライズ前処理制御を実行する。
(もっと読む)
動力伝達装置
【課題】 駆動部材が破損する虞のない動力伝達装置を提供する。
【解決手段】 制御部70からの指令信号に基づいて駆動するステッピングモータ(駆動部材)61aと、このステッピングモータ61aの駆動に伴い回転駆動されるリードスクリュー部61cと、このリードスクリュー部61cの回転によりリードスクリュー部61cの軸方向Xに沿い移動し、被動力伝達部42eに動力を伝達する動力伝達部65とを有し、制御部70は、動力伝達部65が軸方向Xに沿い移動していない場合、ステッピングモータ61aへの指令信号の出力を停止する制御を行う。
(もっと読む)
ステッピングモータ制御装置、アクチュエータ装置、及び車両用ヘッドランプ装置
【課題】モータ作動の円滑化を図ることができるステッピングモータ制御装置を提供する。
【解決手段】ECUの制御周期毎に設定されるモータ作動時間T1がその制御周期未満となる場合、モータ作動のための作動パルスを二分割し、二分割した作動パルス組間に保持励磁のための保持励磁パルスを挿入した指令パルス信号が構成され、その指令パルス信号に基づいてステッピングモータが制御される。すると、作動ステップ数が小さいと、モータ停止時間Tsを一段と長くする原因となる無励磁状態(T3)となり得るが、二分割した作動パルスにてモータ作動を分割しその作動毎に保持励磁動作が行われることで、モータが無励磁となることが低減される。
(もっと読む)
ステッピングモータ制御装置およびステッピングモータの駆動制御方法
【課題】演算制御部からの目標角度信号の出力が、あらかじめ設定された送信周期よりも遅れてなされた場合の脱調防止を図ることができるステッピングモータ制御装置を提供すること。
【解決手段】モータ駆動制御回路2が、目標角度と現在の回動角度との差から、駆動軸3aを目標角度まで回動させるのに必要な目標回動角度を演算する目標回動角度演算処理、回動指示周期の範囲内に単位駆動周期ごとに駆動信号を設定回数出力して駆動軸3aを目標回動角度だけ回動させるのに必要な単位回動角度を演算する単位回動角度演算処理、駆動軸3aを単位回動角度回動させる駆動信号を、単位駆動周期で出力する駆動信号出力処理、回動指示周期の最後の駆動信号出力後に、次の目標角度信号が入力されない場合に、駆動軸3aを、減速させた後に停止させる減速停止処理、を実行するステッピングモータ制御装置とした。
(もっと読む)
1 - 20 / 60
[ Back to top ]