
Fターム[5H680FF30]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 製造、制御、電源、保護 (2,336) | 制御 (1,111) | フィードバック制御 (236)
Fターム[5H680FF30]に分類される特許
221 - 236 / 236
駆動源の制御方法および制御装置

【課題】 駆動源の駆動速度の急激な変化を抑制する。
【解決手段】 第1の変化率で前記駆動源を加速駆動する第1のステップと、該第1のステップの後、前記第1の変化率よりも小さい第2の変化率で前記駆動源を加速駆動する第2のステップと、該第2のステップの後、前記駆動源を所定の速度で駆動する第3のステップとを有する。
(もっと読む)
圧電アクチュエータの駆動装置、圧電アクチュエータの駆動方法、電子機器、圧電アクチュエータの駆動装置の制御プログラムおよび記憶媒体

【課題】 圧電アクチュエータの駆動周波数が、高調波による共振状態でロックすることを防止し、フィルタ用の外付け部品を設ける必要も無く回路の小型化も容易な圧電アクチュエータの駆動装置を提供すること。
【解決手段】 駆動装置50は、振動体910の振動状態を検出する位相差−DC変換回路53、比較回路54と、振動体が高調波で共振していることを検出して高調波検出信号を出力する高調波検出回路52と、振動体の圧電素子へ供給する駆動信号の周波数を制御する積分回路55、可変周波数発振器56、駆動回路57とを備える。積分回路55、可変周波数発振器56、駆動回路57は、高調波検出信号が出力されていない時は比較回路54の出力に基づいて前記駆動信号の周波数を制御し、高調波検出信号が出力されている間は、比較回路54の出力に基づく駆動周波数の制御を実行せず、駆動信号の周波数を変化し続ける。
(もっと読む)
圧電駆動装置
【課題】 圧電アクチュエータの動作不良状態や動作不能状態といった異常状態から容易に且つ確実に脱出する。
【解決手段】 圧電アクチュエータのロッド部21に対するスライダ部22の移動速度が所定の速度より小さいか否かを駆動速度判定部14によって判別し、駆動速度判定部14により当該移動速度が所定の速度より小さいと判別された場合に、駆動周波数設定部12に、圧電アクチュエータに対する駆動周波数として該圧電アクチュエータの共振周波数(f3)又は共振周波数近傍の周波数を設定し、駆動周波数設定部12に設定した共振周波数又は共振周波数近傍の周波数に基づいて駆動部により圧電アクチュエータを駆動する。
(もっと読む)
超音波アクチュエータ装置及び超音波アクチュエータ駆動方法
【課題】超音波アクチュエータの共振点を正確に検出することができるとともに、効率が良い駆動が可能な超音波アクチュエータ駆動装置及び超音波アクチュエータ駆動方法を提供する。
【解決手段】本発明の超音波アクチュエータ駆動装置1は、制御部2、駆動部3、第1及び第2振動情報検出部4、6、超音波振動子5Aを有する超音波アクチュエータ5とを備え、前記制御部2は、前記超音波振動子5Aに縦振動と屈曲振動のうちいずれか一方の振動を発生させた状態における前記第1及び第2振動情報検出部4、6から振動情報から前記超音波振動子5Aの共振周波数を検出し、この共振周波数に基づいて発振部7により発生する交流信号の周波数を設定すると共に、前記超音波振動子5Aに縦振動と屈曲振動を同時に発生させるように、駆動部9により超音波振動子5Aに印加される2相の駆動信号の位相差を設定する。
(もっと読む)
モータ制御回路及びその制御方法
【課題】超音波モータの温度に応じて駆動周波数を制御する際に、温度測定のためにモータと一体に設けられたコンデンサの容量を、複雑な回路を新たに追加することなく測定し、この測定結果に基いてモータを適切に制御することである。
【解決手段】このモータ制御回路は、圧電体を積層した振動子13に設けられた電極に所定周波数の駆動信号を印加し、上記圧電体を振動させてこの振動から駆動力を得る超音波モータ12を駆動するためのものである。上記電極から振動子13への電荷の充電動作若しくは電荷の放電動作が、L−μCom25の制御によりPLL回路26、プリドライバ回路29、ブリッジ回路30によって行われる。コンデンサ容量測定回路27では、該充電動作若しくは放電動作に要する時間に基いて上記圧電体の静電容量が求められ、この静電容量に応じてL−μCom25及び不揮発性メモリ28により、駆動信号の周波数が決定される。
(もっと読む)
超音波アクチュエータ装置及び超音波アクチュエータ駆動方法
【課題】簡単な構成で超音波アクチュエータ内の駆動機構への負担を減らし、正確な停止位置を得ることができる精度の良い駆動制御が可能な超音波アクチュエータ駆動装置及びアクチュエータ駆動方法を提供する。
【解決手段】本発明の超音波アクチュエータ駆動装置1は、制御部2、駆動部3、第1及び第2振動情報検出部4、6、超音波振動子5A及び被駆動体5Bを有する超音波アクチュエータ5とを備え、前記制御部2は、前記被駆動体5Bを起動又は停止するにあたり、前記超音波振動子5Aの振動状態(例えば屈曲振動モード、楕円振動モード、無給電モードの3つの振動モード)を切り替えることによって、前記被駆動体5Bに対する駆動力を徐々に変化させるように制御する。
(もっと読む)
アクチュエータの駆動装置、アクチュエータを用いた機器および画像形成装置
【課題】 簡単な構成で速度及び位置の定常誤差を共にゼロにすることができるアクチュエータの駆動装置を提供する。
【解決手段】 アクチュエータの駆動状態を検出する検出手段7と、検出手段から得られた駆動状態と所定の状態との差を演算する演算手段1と、演算手段から得られた値を積分する第1の積分手段2と、第1の積分手段から得られた値を積分する第2の積分手段3と、第1の積分手段から出力される値と第2の積分手段から出力される値とを加算する加算手段37とを有し、加算手段から出力される値に応じてアクチュエータに供給するエネルギー量を調定する。
(もっと読む)
振動アクチュエータ
【課題】構造が簡単で、小型の製品に組み込みやすく、しかも駆動効率の高い振動アクチュエータを提供すること。
【解決手段】ステータ部10の圧電素子12と加圧部30の加圧板31との間に、緩衝部として、可撓性、気密性のある材料により、リング状であり、その全周にわたって中空に形成されたエアクッション40を設け、ステータ部10の弾性体11の振動に追従して振動する質量を小さくした。これによって、振動エネルギーが吸収される量を小さくなり、振動アクチュエータの駆動効率を向上させることを実現した。
(もっと読む)
超音波モータの駆動回路およびアクチュエータ
【課題】簡易な構成で、超音波モータの駆動を容易かつ確実に制御することができ、駆動効率が高く、かつ制御分解能の高い超音波モータの駆動回路およびアクチュエータを提供する。
【解決手段】駆動回路5は、圧電素子を備える超音波モータ2を駆動する駆動回路であって、パルス生成手段と、単位期間設定手段と、パルス信号の単位期間内のパルス数を調節するパルス数調節手段と、前記調節されたパルス信号に対応するように、交流電圧を前記圧電素子に印加するとともに、前記交流電圧を前記圧電素子に印加している時間帯と重複しない時間帯において、前記パルス生成手段により生成されたパルス信号に対応するように、振幅の小さい交流電圧を前記圧電素子に印加し、前記超音波モータ2を駆動する駆動手段とを有し、前記単位期間内のパルス数を調節することにより、前記超音波モータ2の駆動を制御する。
(もっと読む)
超音波モータの駆動回路およびアクチュエータ
【課題】簡易な構成で、超音波モータの駆動を容易かつ確実に制御することができ、駆動効率の高い超音波モータの駆動回路およびアクチュエータを提供する。
【解決手段】超音波モータ2の駆動回路5は、交流電圧の印加により伸縮する圧電素子と、被駆動体に対して当接する接触部とを有する振動体を備える超音波モータを駆動する駆動回路であって、パルス信号を周期的に生成するパルス生成手段と、単位期間を周期的に設定する単位期間設定手段と、前記パルス信号の周期を保持しつつ、該パルス信号の前記単位期間内のパルス数を調節するパルス数調節手段と、前記調節されたパルス信号に対応する交流電圧を前記圧電素子に印加して前記超音波モータ2を駆動する駆動手段とを有し、前記パルス数調節手段によって前記単位期間内のパルス数を調節することにより、前記超音波モータ2の駆動を制御する。
(もっと読む)
リニア超音波圧電モータ
本発明は、プレート状の長方形の共振板と摩擦接触状態にあって、摩擦面は上記共振板の長手方向の狭い側面の少なくとも一方によって具現される移動エレメントと、上記共振板の長手方向の広い側面に配置される、音響振動を生成するための電極とを備えるリニア超音波圧電モータに関する。本発明によれば、音響振動を生成するための発生器は上記共振板を対称的に横断する平面に対して非対称に配置され、かつ励振されると非対称空間定在波を発生させる対向する2つの電極を備える。 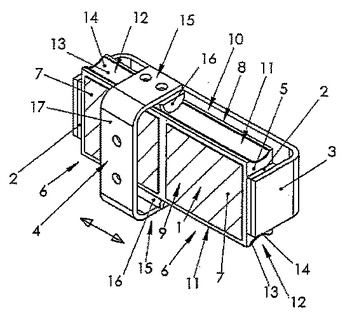 (もっと読む)
(もっと読む)
圧電アクチュエータ
【課題】配線時や駆動時における、配線のはがれ、接触不良および電極の溶解を防止でき、かつ、安定的に駆動することができる圧電アクチュエータを提供すること。
【解決手段】補強板21および圧電素子22を有し、圧電素子22に交流電圧を印加することにより駆動されて振動する振動体2と、補強板21に設けられ、振動体2の振動により被駆動体Rに接触して被駆動体Rに駆動力を伝達する接触部3と、圧電素子22の表面に設けられ、圧電素子22に交流電圧を印加する駆動電極12、13と、圧電素子22の表面に設けられ、振動体2の振動時にて圧電素子22に誘起される電圧を検出する検出電極11、14とを備えた圧電アクチュエータ1であって、駆動電極12、13および検出電極11、14は、それぞれ、その一部に、残部より厚みの厚い導通部51〜54、61、62を有することを特徴とする。
(もっと読む)
ステージのドリフト制御装置
【課題】超音波モータによってステージを一次元方向に動かす場合に、ステージ停止後のステージのドリフトを抑える。
【解決手段】1次元方向に動くステージ2に接触可能な接触部材3又はそれに連結された基材9aを一つの電極として、前記一次元方向の前又は後の位置に他の固定電極13,14を対向させて2つのコンデンサを形成し、前記2つのコンデンサに交流電圧を印加して、当該コンデンサの静電容量の変化に基づく信号を取り出し、この変化信号に基づいて、所定の停止位置にステージ2を停止させるように制御する。
(もっと読む)
少なくとも1つの圧電アクチュエータを備えた回路
制御回路(3)が駆動指令(S*)を与えた場合、駆動回路(1)は、圧電アクチュエータ(Pi)に対して駆動信号(S)を出力し、この駆動信号(S)により、圧電アクチュエータ(Pi)が、0位置から駆動位置に移行し、制御回路(3)が補正指令(I1*、I2*)をプリセットした場合、補正回路(2)は、圧電アクチュエータ(Pi)に対して補正信号(I1、I2)を出力し、圧電アクチュエータ(Pi)が、0位置から補正位置に移行し、駆動指令(S*)のプリセットと、補正指令(I1*、I2*)のプリセットとが、互いに関してロックしあう(verriegelt)ように、制御回路(3)が構成されている。  (もっと読む)
(もっと読む)
圧電アクチュエータ駆動装置、電子機器、その駆動方法、その駆動制御プログラム、そのプログラムを記録した記録媒体
制御回路131は、電源電圧の低下速度が基準低下速度よりも速い場合、すなわち駆動効率が悪く電力消費量が多い駆動周波数で駆動している場合や、何らかの要因によって圧電アクチュエータAが起動できない場合には、所定駆動周波数に戻してから駆動周波数変更を再実行させる。従って、起動失敗を検出するまでの時間が長期化することなく、電源電圧の低下速度に基づいて起動失敗等が即座に判断でき、この判断に要する時間が短縮化されるので、異常の検知から駆動信号の最適化までの処理を迅速に実行することができるとともに、電力消費量を低減して省電力化が実現できる。 (もっと読む)
圧電アクチュエータ駆動装置、電子機器、その駆動方法、その駆動制御プログラム、そのプログラムを記録した記録媒体
電源と、圧電アクチュエータAと、この圧電アクチュエータの駆動を制御する駆動制御装置100とを備えた電子機器において、駆動制御装置100は、駆動信号SDRを振動体12の圧電素子に供給する駆動回路111と、振動体12の振動状態を表す位相差を検出する位相差検出手段120と、振動状態の目標となる目標位相差を補正する比較電圧設定回路133と、位相差と目標位相差とを比較する駆動周波数設定手段140とを備え、比較結果に基づいて位相差が目標位相差に近づくように駆動信号SDRの駆動周波数を変更させことで、駆動電圧に依存せず、高効率な圧電アクチュエータAの駆動が実現できる。 (もっと読む)
221 - 236 / 236
[ Back to top ]