
Fターム[5H680FF30]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 製造、制御、電源、保護 (2,336) | 制御 (1,111) | フィードバック制御 (236)
Fターム[5H680FF30]に分類される特許
21 - 40 / 236
振動型アクチュエータの制御装置
【課題】振動体の振幅を検出せず、急激な負荷変動に対しても印加電圧の周波数が振動体の共振周波数を超えない制御で、安定した駆動が可能な振動型アクチュエータの制御装置を提供する。
【解決手段】振動体に励起される振動波で移動体を相対移動させる振動型アクチュエータの制御装置であって、振動体に印加する交流電圧の周波数を指令する指令手段と、指令手段の指令に基づき、振動体に印加する交流電圧を生成する交流電圧生成手段5と、交流電圧における周波数、振幅、位相のうちの一つ以上のパラメータに、所定の変動を与える変動付与手段と、変動付与手段が出力する変動を入力とし、振動体の振動に応じて変化する物理量を出力とする、一つ以上の所定周波数での周波数応答特性を求める周波数応答特性計測手段12と、を備え、共振周波数推定手段13から出力された共振周波数の推定値に応じて、交流電圧生成手段5が出力する交流電圧の周波数範囲を決定する。
(もっと読む)
振動型アクチュエータの制御装置

【課題】摩擦力の変化、環境変動、個体差による周波数応答特性の変化に追随して、印加電圧の周波数を高精度に制御することができる振動型アクチュエータの制御装置を提供する。
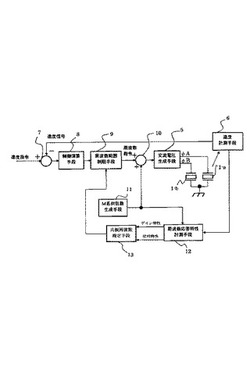
【解決手段】振動型アクチュエータの制御装置は、振動体に加振力を印加するための交流電圧における周波数、振幅、位相のうちの少なくとも一つのパラメータを設定可能な交流電圧生成手段8と、振動体の振動に起因するいくつかの物理量を計測する計測手段9と、交流電圧における少なくとも一つのパラメータに、所定の変動を与える変動付与手段と、変動に応じた第1の信号と、計測された物理量に応じた第2の信号と、の間における少なくとも一つの所定周波数による周波数応答特性を求める周波数応答特性計測手段10と、周波数応答特性に応じて交流電圧の周波数を制御する周波数制御手段と、を有する。
(もっと読む)
振動型アクチュエータの制御装置
【課題】 従来は回転速度検出において、光学式のエンコーダ等を用いずに速度検出を行う場合、移動体の形状を変える必要があった。
【解決手段】 振動型アクチュエータの振動検出用電極から検出されるS相信号に、振動体の複数の突起部の数に対応する周波数の振幅変動が生じることを利用して、回転速度情報を検出する。
(もっと読む)
ピエゾアクチュエータ駆動装置
【課題】共振周波数から外れた周期でアクチュエータが駆動される期間をより短くすることが可能なピエゾアクチュエータの駆動技術を提供すること。
【解決手段】ピエゾアクチュエータ駆動装置1は、ピエゾアクチュエータ2を動作させるための第1信号を出力する駆動信号出力部10,13と、第1信号よりも相対的に振幅の小さい第2信号を、第1信号の前段又は後段の少なくとも一方に付加する信号付加部11,12と、第2信号の周波数とピエゾアクチュエータの共振周波数との差異に応じたレベルの第3信号を駆動信号出力部へフィードバックする共振周波数検出部14と、を備える。駆動信号出力部は、第3信号のレベルに対応して第1信号の周波数の設定値を増減させる。
(もっと読む)
振動型駆動装置の制御装置および振動型駆動装置の出力特性検出方法
【課題】振動子の製作工程や形状により生じた出力特性のバラツキを、振動子が振動型駆動装置として取り付けられた状態で検出することが可能となる振動型駆動装置の制御装置を提供する。
【解決手段】制御手段による制御のもとで、
複数の振動子のうちの出力特性を検出する検出対象の振動子に対し、被駆動体との接触面と垂直な方向に駆動部を変位させる第1の振動モードの振動と、被駆動体との接触面と平行な方向に駆動部を変位させる第2の振動モードの振動と、を励起させることにより駆動部に楕円運動を生じさせる交流電圧を駆動信号生成手段により印加する一方、
検出対象の振動子以外の振動子には、第1の振動モードの振動を励起する交流電圧のみを駆動信号生成手段により印加し、出力特性検出手段によって、検出対象の振動子の出力特性を検出する。
(もっと読む)
振動発生装置、その駆動方法、異物除去装置および光学装置
【課題】従来のものに比べ、より一層の駆動効率の向上を図ることが可能となる振動発生装置を提供する。
【解決手段】圧電材料で形成された圧電体を電極で挟持して構成された圧電素子と、
前記圧電素子が接合された振動体と、
前記圧電素子に交番電圧を印加する電源と、
を備え、前記電源による前記圧電素子への交番電圧の印加によって、前記振動体に振動を発生させる振動発生装置であって、
前記圧電素子は、交番電圧印加に伴なって共振周波数が高周波側に変化する圧電体によって構成され、
前記電源の印加による交番電圧の周波数を制御する制御部を備え、
前記制御部は、前記圧電素子へ印加された交番電圧の周波数を制御することにより、前記圧電素子が有する共振周波数の変化範囲を包含する周波数範囲において、該圧電素子の共振周波数を低周波数側から高周波数側に逐次変化させる。
(もっと読む)
圧電アクチュエータ駆動回路、及びそれを備えた圧電アクチュエータ装置
【課題】高いエネルギー効率を得ることができる圧電アクチュエータ駆動回路を提供する。
【解決手段】本発明は、圧電アクチュエータ駆動回路(3)であって、駆動素子(4a)を振動的に変形させる駆動素子駆動回路(8)と、従動素子制御回路(10)と、を有し、従動素子制御回路は、電圧源(22)と、第1の端子が従動素子(4b)に接続されたコイル(28)と、このコイルの第2の端子と電圧源とを接続し、コイルの第2の端子から電圧源の方向にのみ電流を流す一方向導通素子(24)と、コイルの第2の端子とアース電位との間に接続され、制御信号により導通状態と非導通状態に切り換えられるスイッチング素子(26)と、このスイッチング素子を所定のタイミングで非導通状態とすることにより、コイルの第2の端子から電圧源に電力を回生させる制御信号を発生する制御信号生成回路(32,33)と、を有することを特徴としている。
(もっと読む)
振動型モータの制御方法および振動型モータの駆動装置
【課題】温度変化や駆動負荷の変化による電流の増加に対して電流の供給量を越えないようにすると共に、その供給量の制限内で大きい出力を出せるように、周波数及びパルス幅が制御可能な振動型モータの制御方法を提供する。
【解決手段】楕円運動を生成するための駆動信号を発生させる駆動信号発生手段と、駆動信号を前記電源の電圧でスイッチングし、駆動信号のパルス幅を変更するスイッチング手段と、スイッチング手段を介して電気−機械エネルギー変換素子に流れる電流を検出する電流検出手段と、被駆動体の位置および速度を検出する検出手段と、各手段の制御を司ると共に、被駆動体の速度を設定する制御部と、を備え、制御部は、目標速度に対し、電流検出手段による検出電流が所定のリミット値を越えない範囲内で最大限の出力特性が出せるように、駆動信号の周波数とパルス幅を制御する。
(もっと読む)
モータ装置、回転子の駆動方法及びロボット装置
【課題】高トルクを発生させること。
【解決手段】回転子と、当該回転子の外周の少なくとも一部に掛けられた伝達部と、当該伝達部に接続され、制御信号が供給されることで伝達部を駆動する駆動部と、当該駆動部に所定電圧及び所定周波数の第一制御信号を供給することで、回転子と伝達部との間を回転力伝達状態として伝達部を一定距離移動させると共に回転力伝達状態を解消した状態で伝達部を所定の位置に戻すように駆動部を駆動させる第一駆動モード、及び、駆動部に対して所定電圧及び所定周波数のうち少なくとも一方が第一制御信号よりも高い第二制御信号を供給することで、第一駆動モードよりも発熱量が多くなるように駆動部を駆動させる第二駆動モード、を切り替えて駆動部に行わせる制御部とを備える。
(もっと読む)
複数の振動子を用いた振動型アクチュエータの制御装置並びに調整方法、振動型アクチュエータ、及びそれを用いたレンズユニット並びに光学機器
【課題】 1つの被駆動体を複数の振動子で駆動する振動型アクチュエータにおいて、振動子を組み込んだ後でも個々の振動子の特性を調整することを可能にする。
【解決手段】 複数の振動子のうち1つ以上の振動子を駆動させその他の振動子を定在波駆動させた状態で被駆動体の速度を取得することにより各々の振動子における交流信号の周波数に対する被駆動体の速度の特性を取得し、取得した特性に基づいて各々の振動子に供給する交流信号の振幅と周波数と各々の振動子に供給する2つの交流信号の位相差のうち少なくとも1つを調整することで複数の振動子間の特性のずれを低減する。
(もっと読む)
振動型アクチュエータの制御装置及び制御方法
【課題】 ロータの回転方向を切り替える際、ロータの速度変動や可聴音が生じる可能性があった。
【解決手段】 本発明の振動型アクチュエータの制御装置は、第1の交流電圧を振動体に印加することによって前記振動体の接触部に生成する第1の楕円運動と、第2の交流電圧を前記振動体に印加することによって前記接触部に生成する、前記第1の楕円運動とは異なる向きに回転する第2の楕円運動と、の合成によって、前記振動体と前記振動体の接触部に接触する移動体とを相対移動させる。そして、前記第1の交流電圧と前記第2の交流電圧とを前記振動体に印加する電圧供給手段を有し、前記電圧供給手段は、前記相対移動の速度指令に応じて前記第1の楕円運動の振幅と前記第2の楕円運動の振幅との差を変化させるように、前記第1の交流電圧の振幅と前記第2の交流電圧の振幅とを夫々変化させることを特徴とする。
(もっと読む)
アクチュエータの駆動装置ならびにそれを用いる平行移動機構、干渉計および分光器
【課題】被駆動部材となる可動部とそれを駆動する駆動部とを備えて成るアクチュエータをPLL回路で駆動し、機械共振駆動を行わせる駆動装置において、短時間でかつ確実な位相引き込み動作を可能にし、さらに回路規模の増大やコストアップを抑える。
【解決手段】PLL回路のループフィルタ部14aを、位相比較器13の位相比較信号Vpdを平滑化してVCO11へ制御電圧Vcとして与えるLPFとしての機能を実現する積分回路21に、基準電圧源22とリセット手段としての短絡スイッチ23とを設ける。したがって、前記制御電圧Vcは、積分動作に伴い、基準電圧Vrefから共振周波数の目標電圧付近に滑らかに移行するので、オーバーシュートやリンギングの発生がなく、短時間でかつ確実な位相引き込み動作(位相ロックイン)を行うことができる。また、PLLループの外部に、制御信号を掃引するための特別な構成を設ける必要もない。
(もっと読む)
振動型アクチュエータの制御回路
【課題】 従来のPID補償器を用いた制御系では、弾性体に設けられた突起の影響により、振動型アクチュエータの駆動中に突起の数に応じた周期的な速度変動を十分に抑制することができなかった。
【解決手段】 振動型アクチュエータの制御回路において、速度又は位置をフィードバック制御する繰返し補償器を備え、繰返し周期を、突起と移動体の接触領域分布に基づく速度偏差の空間周波数に設定する。
(もっと読む)
対象物の位置検出装置、光学構造、携帯端末、及び、対象物の位置検出方法
【課題】電子機器の小型化、薄型化、省コスト化に対応するとともに、レンズの位置制御が効率的に行える光学構造を提供する。
【解決手段】カメラ装置10の光学構造は、圧電素子18に第2電気信号を入力し、この第2電気信号に基づいて圧電素子18にて第2振動信号を発生させる。また、光学系制御部20は、圧電素子18に出力した第2電気信号と、第2振動信号がレンズマウント14aで反射した第3振動信号である反射波信号40aが圧電素子18で変換された第3電気信号と、に基づいて、圧電素子18に対するレンズ14の位置を検出する。この検出位置に基づき、圧電素子18からの第1振動信号によって、レンズ14がフォーカス位置に移動され、オートフォーカス制御が実行される。
(もっと読む)
アクチュエーター及びアクチュエーターの駆動方法
【課題】センサーを内蔵するアクチュエーターにおいて駆動電極の影響を受けにくいセンサーを提供する。
【解決手段】電解質膜と、上記電解質膜の互いに対向する面にそれぞれ配置されて該電解質膜に電位差を与える第1及び第2の駆動電極層と、上記電解質膜上に形成されて該電解質膜の表面に発生する電圧を検出するセンサー電極層と、指令信号と上記センサー電極層の出力とに基づいて上記第1及び第2の駆動電極層に駆動電圧を供給する駆動制御回路と、を備え、上記駆動制御回路は、時間軸上において上記駆動電圧の供給期間と上記電圧の検出期間とを分離したことを特徴とする。
(もっと読む)
位置決め装置および位置決め方法
【課題】効率よく安定的な位置決め制御を可能にする位置決め装置および位置決め方法を提供する。
【解決手段】制御量に基づく超音波モータの駆動により対象物の位置決めを行う位置決め装置100であって、動作する対象物が始動する直後、または停止する直前の一連のサイクルのうち少なくとも1つのサイクルにおける制御量を記憶する制御量記憶部110と、記憶された制御量に基づきオフセットを設定するオフセット設定部115と、動作する対象物の目的位置に基づき1サイクル毎に算出位置を指示する指示部120と、動作する対象物の現在位置を検出する位置検出部130と、検出された現在位置および指示された算出位置に基づき制御量を算出する算出部140と、算出された制御量に設定されたオフセットを重畳して超音波モータを駆動し、対象物を動作する駆動部160とを備える。
(もっと読む)
超音波モータの駆動回路および駆動方法
【課題】対象物を低速で滑らかに動作することができ、より細かな動作を可能にする超音波モータの駆動回路および駆動方法を提供する。
【解決手段】対象物を動作するための超音波モータの駆動回路160であって、入力された制御電圧が基準電圧より小さいか否かを判定する判定部132と、入力された制御電圧が基準電圧より小さい場合には、制御電圧に応じたパルス幅を算出するパルス幅演算部133と、算出されたパルス幅で、対象物の安定的動作が可能な安定領域内の駆動電圧をパルス幅分出力する駆動部140とを備え、出力されたパルス幅分の駆動電圧により超音波モータを駆動する。制御電圧が基準電圧より小さい場合には制御電圧に応じたパルス幅分の駆動電圧を出力することで、対象物を動作する。その結果、対象物を低速で滑らかに動作することができ、より細かな動作を可能にする。
(もっと読む)
超音波モータ
【課題】全体構成を簡略化することができ、かつ、配線の数を減らすことのできる超音波モータを提供する。
【解決手段】中心軸に垂直な断面が矩形状の長さ比率を有する振動子と、振動子の楕円振動発生面に接して振動子の楕円振動発生面と直交する中心軸を回転軸として回転駆動されるロータと、を少なくとも備えた超音波モータであって、振動子の回転軸方向に伸縮する縦1次共振振動と、回転軸をねじれ軸とするねじれ共振振動と、を合成することにより、楕円振動を形成してなり、振動子の回転軸方向に伸縮する縦1次共振振動と、回転軸をねじれ軸とするねじれ共振振動と、の共振周波数がほぼ一致するように、振動子の矩形状の長さ比率を設定し、振動検出電極層を備える。
(もっと読む)
圧電アクチュエーターの制御装置、圧電アクチュエーター装置及び印刷装置
【課題】 圧電アクチュエーターの高出力での駆動を安定して行うことができる圧電アク
チュエーターの制御装置を提供する。
【解決手段】 検出用電極95,96を介して変位検出部330が検出したアクチュエー
ター部10の駆動に伴う変位及び記憶部340が記憶している変位に基づき位相調整回路
312を介して縦振動用の第1の駆動信号に対する屈曲振動用の駆動信号の一つである第
2の駆動信号の位相を位相調整回路312を介して制御する駆動位相制御部320を有し
、この駆動位相制御部320は、前記第1の駆動信号に対する第2の駆動信号の位相差を
表す所定の初期位相を中心として第1の駆動信号に対する第2の駆動信号の位相を所定の
振り幅で変化させ、これに伴い検出信号が最小となる位相に前記振り幅の中心位相をシフ
トさせるとともにかかる操作を繰り返し前記中心位相が前記変位の最小値に追従してシフ
トされるように記第2の駆動信号の位相を制御するように構成した。
(もっと読む)
圧電モーターの制御装置、圧電モーターの制御方法、圧電モーター装置及び印刷装置
【課題】駆動効率を向上することができる圧電モーターの制御装置、圧電モーターの制御方法、圧電モーター装置及び印刷装置を提供する。
【解決手段】駆動手段310と、切換手段330と、制御手段320と、を具備し、駆動手段310は、縦振動励起領域と2組の屈曲振動励起領域とに設けられた電極61〜63に駆動信号を入力して駆動し、切換手段330は、振動励起領域と2組の屈曲振動励起領域とに設けられた電極63の接続先を駆動手段310と制御手段320とに切り換えるものであり、制御手段320は、縦振動励起領域及び2組の屈曲振動励起領域に設けられた電極63を最適出力決定時に駆動手段310から当該制御手段320に接続するように切換手段330を制御すると共に、最適出力決定後には、当該制御手段320に接続された電極63を駆動手段310に接続するように切換手段を制御する。
(もっと読む)
21 - 40 / 236
[ Back to top ]