
Fターム[5H680FF30]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 製造、制御、電源、保護 (2,336) | 制御 (1,111) | フィードバック制御 (236)
Fターム[5H680FF30]に分類される特許
41 - 60 / 236
超音波モータを備えた駆動装置
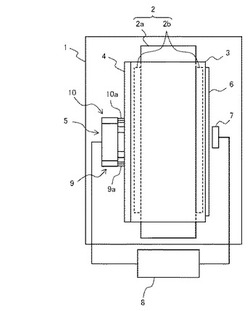
【課題】簡易な構成によって、超音波モータ駆動時に駆動子と摺動部材との摺動によって発生した摩耗粉を摺動部材に付着させないようにする。
【解決手段】駆動装置は、固定台1と、固定台1に対して移動可能に支持された移動体3と、移動体3に固定された摺動部材4と、摺動部材4との摩擦により移動体3と固定台1とを相対移動させる超音波モータ5と、摺動部材4に発生する静電気を除去する、接地されたブラシ毛9a、10aと、を備える。
(もっと読む)
コントローラ

【課題】操作対象物に加わる力を正確に操作者に伝達させて操作性の向上を図ることができるようにする。
【解決手段】コントローラ1は、略球状の回転子4と、複数の駆動力発生部3A〜3Cと、回転子4に取り付けられ、回転子4を転動させる操作アーム5と、位置検出部6と、マスタ側力センサ7と、制御部8とを備えている。複数の駆動力発生部3A〜3Cは、回転子4を転動可能に支持すると共に、超音波振動を発生させて回転子4を転動させる。位置検出部6は、操作アーム5の位置情報を検出する。マスタ側力センサ7は、操作アーム5に取り付けられ操作アーム5から回転子4に加えられる力を検出している。そして、制御部8は、操作対象物100に作用する外力とマスタ側力センサ7によって検出した操作アームの力情報fmに基づいて複数の駆動力発生部3A〜3Cを制御する。
(もっと読む)
振動装置の駆動回路、及び振動装置の駆動方法
【課題】振動体上を移動する振動波を発生させるに際し、低エネルギーで振動波を効率良く発生させ、振動体に接する被移動体を所定の方向に移動させることが可能となる振動装置を提供する。
【解決手段】第1の振動モードの振動と、これとは次数の異なる第2の振動モードの振動と、を弾性体上に励振し、弾性体上に前記第1と第2の振動モードの振動とを合成した合成振動波を形成する振動装置の駆動回路であって、
第1の振動モードの振動を励振するための第1の交流信号を発生する第1の信号発生器と、第2の振動モードの振動を励振するための第2の交流信号を発生する第2の信号発生器と、
第1の交流信号と第2の交流信号の周波数が異なる周波数となるよう信号発生器の発生する周波数を設定し、
合成振動波の移動方向に応じて合成振動波の振動振幅に差を生じさせるよう第1の交流信号と第2の交流信号のうち少なくとも一方を制御する制御手段と、を有する。
(もっと読む)
駆動システム
【課題】制御対象となる作用素の数が増大した場合であっても、所望の作用を呈するように容易に制御することが可能な駆動システムを提供する。
【解決手段】外部の環境に対して所定の作用を呈する作用素13と、作用素13を駆動する駆動源12とを有する駆動体14を複数備え、複数の駆動体14、14、・・・を、一の信号源11が発する信号に応じて動作するように制御する。外部の環境に対して呈する作用による環境の変化に関する情報を取得するセンサ15を有し、センサ15が取得した環境の変化に関する情報に基づいて、信号源11が発する信号を調整する。
(もっと読む)
振動アクチュエータ駆動装置、レンズ鏡筒、及び、電子カメラ
【課題】振動アクチュエータを駆動する際に生じるノイズを低減する振動アクチュエータ駆動装置を提供する。
【解決手段】振動アクチュエータ駆動装置(14)は、周波数を有する駆動信号を振動アクチュエータに出力する出力部(144)と、前記振動アクチュエータ(12)の駆動を指示する信号が入力されると、予め定められた第1振幅を有する前記駆動信号を前記振動アクチュエータ(12)に出力した後に、前記駆動信号の振幅を前記第1振幅から当該第1振幅より大きい予め定められた第2振幅まで増加させつつ当該駆動信号を前記振動アクチュエータ(12)に出力する第1動作を前記出力部(144)に行わせる制御部(141)を備える。
(もっと読む)
振動アクチュエータの制御装置
【課題】 従来の振動アクチュエータの制御装置では、調整時において、振動アクチュエータを低速で回転させた場合、回転ムラや負荷トルクのムラにより振動アクチュエータが途中で止まってしまい、振動アクチュエータの調整が行えないという問題があった。
【解決手段】 フィードバック制御手段により、予め設定された目標回転数に対応すると推定される周波数fの駆動信号Sa、Sbによって超音波モータ9が駆動され、速度検出器10で計測される回転数Nを目標回転数にするフィードバック制御が行われる。また、特性決定手段により、目標回転数が駆動信号Sa、Sbの複数の周波数帯域で設定されて、複数の目標回転数付近における超音波モータ9の駆動周波数fと回転数Nとの相関特性が計測されて、実際の相関特性が決定される。このため、調整時において、超音波モータ9がほぼ一定の回転数Nで回転する。
(もっと読む)
振動アクチュエータ駆動装置、レンズ鏡筒、及び、光学装置
【課題】振動アクチュエータの製造ばらつきによる消費電力の増加を抑制する振動アクチュエータ駆動装置を提供する。
【解決手段】アクチュエータ駆動装置(10)は、所定の周波数を有する発振信号を生成する発振部(11)と、前記発振部が生成した前記発振信号を増幅し、該増幅した信号を駆動信号として前記振動アクチュエータに印加する増幅部(13)と、前記振動アクチュエータに印加された前記駆動信号の電圧を検出する電圧検出部(14)と、前記電圧検出部により検出された電圧が予め定められた電圧になる増幅率を算出して前記増幅部の増幅率を算出した増幅率に変更する制御部(17)とを具備する。
(もっと読む)
移動機構、顕微鏡、最適駆動パラメータ抽出方法、及びプログラム
【課題】安定して確実に動作する超音波モータの最適駆動パラメータを簡便に設定することができるようにする。
【解決手段】移動機構は、固定台1と移動体3とを相対移動させる超音波モータ6と、固定台1と移動体3との相対移動量を検出する変位センサ8と、変位センサ8により検出された相対移動量が入力され、超音波モータ6に駆動信号を出力する制御装置9とを備える。制御装置9は、超音波モータ6に出力する駆動信号の最適駆動パラメータを抽出する機能を有する。この機能に係る処理では、超音波モータ6に出力する駆動信号の駆動パラメータを設定し、当該駆動信号を超音波モータ6に出力し、当該駆動信号の出力による固定台1と可動体3との相対移動量を変位センサ8から取得する、という処理を駆動パラメータを変更させながら繰り返し、変位センサ8から取得した相対移動量に基づいて最適駆動パラメータを抽出する。
(もっと読む)
超音波モータ
【課題】駆動時における異音の発生を低減させた超音波モータを提供すること。
【解決手段】被駆動体5に当接する駆動子10を備える超音波振動子4に2相の駆動信号を印加して縦振動と屈曲振動とを同時に発生させることで、前記超音波振動子4に楕円振動を発生させ、該楕円振動から駆動力を得て前記駆動子10により前記被駆動体5を摩擦駆動する超音波モータを、次のように構成する。すなわち、制御CPU22は、前記2相の駆動信号の位相差である駆動位相差を切り替えて駆動する際に、駆動位相差の切り替えの周期を変化させるよう駆動位相差の切り替えタイミングを制御する。
(もっと読む)
超音波モータの駆動回路装置
【課題】超音波モータの駆動回路における一次側の制御回路ではどうにもならない一次側の高周波入力電圧のパルス幅とET積による二次側の電圧変動を解決する。
【解決手段】圧電振動子を励振させる基準周波数の信号を生成する発振回路と、前記基準周波数の信号と検出信号とでパルス幅を変調する駆動信号発生回路と、ドライバ回路と、スイッチング回路と、一次側の制御された入力電圧を電力増幅するリーケージトランスと、を有し、二次側にリーケージインダクタLkと圧電振動子の制動容量Coとで共振回路を構成させ、圧電振動子を励振させる駆動電圧出力回路としたものである。
(もっと読む)
圧電アクチュエータ制御装置
【課題】圧電素子から生じる音を低減することができる圧電アクチュエータ制御装置を提供する。
【解決手段】第1の圧電素子としてのバイモルフ型圧電素子110および第2の圧電素子としての積層型圧電素子120を備える圧電アクチュエータ100に制御電流を供給する圧電アクチュエータ制御装置200は以下を備える。複数の通知信号を周期的に順次出力するカウンタ221と、カウンタ221からの通知信号に基づき第2の昇圧回路232で緩やかに増減する第2の電圧V2を形成する第2の昇圧回路232とを備える。そして、この緩やかに増減する第2の電圧V2により増幅されたPWM信号が、積層型圧電素子120に印加される。
(もっと読む)
超音波モータ駆動装置
【課題】被駆動体に搭載物を追加しても超音波振動子にかかる押圧力を一定に保つことを可能とし、これにより動作が安定した超音波モータ駆動装置を提供する。
【解決手段】縦振動と屈曲振動を同時に励振して楕円振動を発生させ、楕円振動を駆動力とする、ベース部材上に設けられた超音波振動子を有する超音波モータ駆動装置であって、被駆動体と、被駆動体と対向するように超音波振動子に設けられ、被駆動体と接触し被駆動体を変位平面内の任意の方向に駆動させる駆動子と、超音波振動子と被駆動体との間に作用する押圧力を検出する押圧力検出部と、押圧力検出部による検出結果に基づき押圧力を所定の押圧力に調節する押圧力調整部と、を備え、ベース部材と被駆動体がシャフトにより機械的に連結されている。
(もっと読む)
振動型駆動装置
【課題】移動体の位置を検出できる駆動装置を提供する。
【解決手段】振動型駆動装置1は、軸状の駆動部材7と、駆動部材7を傾斜させることも軸方向に変位させることもできる電気機械変換素子6と、駆動部材7に摺動可能に係合する移動体8と、駆動部材7を軸方向に非対称に往復変位させて移動体8を駆動部材に対して滑り変位させる周期的な摩擦駆動電圧と、駆動部材7を傾斜させる傾斜駆動電圧とを電気機械変換素子に印加可能な駆動回路3と、傾斜駆動電圧が印加されたときの電気機械変換素子6の電圧または電流の立ち上がり波形を検出する波形検出手段27と、電圧または電流の立ち上がり波形に基づいて移動体の位置を推定する位置推定手段4とを有する。
(もっと読む)
超音波アクチュエータ
【課題】大型化および高コスト化せずに、移動体の移動方向を含む位置制御を高精度に行うことができる超音波アクチュエータを提供する。
【解決手段】超音波アクチュエータ100において、圧電振動子2bの振動状態は、移動体1が移動することにより、突起部のすべてが第1の領域に位置する駆動状態と、突起部の一部が前記第1の領域に位置し、突起部の残りの突起部が第2の領域に位置する検出状態とがあり、さらに、検出状態においては、第1の領域に位置する突起部の数によって第1検出状態および第2検出状態があり、演算部17は、移動体が移動することにより生じる、圧電振動子2bの振動状態の変化に基づいて、移動体1の位置情報を算出する。
(もっと読む)
駆動装置
【課題】1つで多次元の位置決めが可能な駆動装置を提供する。
【解決手段】駆動装置1は、軸状の駆動部材4と、それぞれ駆動部材4の軸方向に伸縮可能に並列して設けられた複数の伸縮部11,12を有し、駆動部材4の一端を保持する電気機械変換素子3と、駆動部材4に摩擦係合し、駆動部材4上で滑り変位可能な移動体5と、一部の伸縮部11,12に、他の伸縮部11,12と異なる、変化率の小さい直流電圧成分を印加し、伸縮部11,12の全てに、共周期的に変動する共通の交流電圧成分を印加する駆動回路とを有する。
(もっと読む)
駆動装置
【課題】駆動回路を簡素化する。
【解決手段】圧電素子26に第1の極性の駆動電圧を印加して充電する第1スイッチ回路141及び第4スイッチ回路144からなる第1の駆動回路と、逆極性の駆動電圧を印加して充電する第2スイッチ回路142及び第3スイッチ回路143からなる第2の駆動回路と、充電された電荷を放電する第2スイッチ回路142及び第4スイッチ回路144からなる放電回路とを備え、第1の駆動回路と第2の駆動回路とを交互に駆動させる間に放電回路を駆動させる。そして、被駆動部材を、第1の方向に移動させる場合には0.05より大きく、0.45より小さいデューティ比の矩形波からなる駆動電圧を、逆の第2の方向に移動させる場合には0.55より大きく、0.95より小さいデューティ比の矩形波からなる駆動電圧を発生する。したがって、駆動回路14を簡素化することができる。
(もっと読む)
駆動装置
【課題】係合部材の所定位置への移動制御を可能にする。
【解決手段】駆動電圧が印加されることにより伸縮する圧電素子26と、該圧電素子26により駆動される駆動部材28と、該駆動部材28に所定の摩擦力で係合された係合部材30と、前記圧電素子26を矩形波からなる駆動電圧により駆動する駆動回路14と、該駆動回路14の動作を制御する制御部22とを備え、前記圧電素子26の伸張と縮小とを異なる速度で行わせることで前記駆動部材28と係合部材30とを相対移動させる圧電アクチュエータ10において、前記係合部材30の位置を検出する部材センサ16をさらに備え、前記制御部22は、前記部材センサ16からの信号に基づいて所定のデューティ比の駆動パルスを出力し、該駆動パルスに応答して、前記駆動回路14が前記矩形波を発生することで、前記圧電素子26を駆動する。
【選択図】図1  (もっと読む)
(もっと読む)
ピエゾアクチュエータ駆動方法、ピエゾアクチュエータ制御回路、及び防振制御回路
【課題】ピエゾアクチュエータの駆動において、異音が生じることがある。
【解決手段】パルス生成回路26は、ピエゾ素子14に印加する駆動パルスとして、レンズ8を所定のステップ幅変位させるデューティ比を有した変位用パルスと、レンズ8を現在位置に停留させるデューティ比を有した停留用パルスとを選択的に生成することができる。パルス生成回路26は、サーボ制御周期内での複数回連続する駆動パルスの発生を制御し、所要変位量の残余量が所定の閾値以上である場合、変位用パルスを発生させ、一方、前記残余量が前記閾値未満となった場合、次のサーボ制御周期の開始まで停留用パルスを持続的に発生させる。
(もっと読む)
モータ装置、回転子の駆動方法及び軸部材の駆動方法
【課題】高トルクを発生させることができる、小型のモータ装置、回転子の駆動方法及び軸部材の駆動方法を提供すること。
【解決手段】第1部材と、前記第1部材を取り囲んで設けられる第2部材と、前記第1部材に接続され、前記第2部材の内面の少なくとも一部に対して当接状態及び離間状態とすることが可能に設けられた伝達部材と、前記伝達部材に接続され、前記伝達部材を前記当接状態として前記第1部材及び前記第2部材のうち少なくとも一方に回転力を付与する駆動部とを備える。
(もっと読む)
圧電駆動装置、圧電駆動装置の制御方法および電子機器
【課題】高効率な駆動を実現することができる圧電駆動装置、圧電駆動方法および電子機器を提供する。
【解決手段】駆動信号の周波数として縦振動と反共振動の共振周波数を有する圧電素子を備える圧電アクチュエーターを以下のように駆動制御する。先ず、駆動開始時は初期駆動制御モードで駆動を制御し、その後、被駆動体のローターが所定量駆動するまでは定常駆動制御モードに切り替えて駆動を制御する。定常駆動制御モードでは、ローターの振動状態に基づいて周波数制御される駆動信号を圧電素子に印加し、かつ、定常駆動制御モードでの駆動を終了する際にその時の駆動信号の周波数を次回駆動時の駆動周波数f0として記憶する。初期駆動制御モードでは、初めに圧電素子に駆動周波数f0よりも低い固定周波数fr1の駆動信号を印加し、その後、予め設定されたタイミングで、駆動周波数f0に固定された駆動信号を印加する。
(もっと読む)
41 - 60 / 236
[ Back to top ]