
振動装置の駆動回路、及び振動装置の駆動方法

【課題】振動体上を移動する振動波を発生させるに際し、低エネルギーで振動波を効率良く発生させ、振動体に接する被移動体を所定の方向に移動させることが可能となる振動装置を提供する。
【解決手段】第1の振動モードの振動と、これとは次数の異なる第2の振動モードの振動と、を弾性体上に励振し、弾性体上に前記第1と第2の振動モードの振動とを合成した合成振動波を形成する振動装置の駆動回路であって、
第1の振動モードの振動を励振するための第1の交流信号を発生する第1の信号発生器と、第2の振動モードの振動を励振するための第2の交流信号を発生する第2の信号発生器と、
第1の交流信号と第2の交流信号の周波数が異なる周波数となるよう信号発生器の発生する周波数を設定し、
合成振動波の移動方向に応じて合成振動波の振動振幅に差を生じさせるよう第1の交流信号と第2の交流信号のうち少なくとも一方を制御する制御手段と、を有する。
【解決手段】第1の振動モードの振動と、これとは次数の異なる第2の振動モードの振動と、を弾性体上に励振し、弾性体上に前記第1と第2の振動モードの振動とを合成した合成振動波を形成する振動装置の駆動回路であって、
第1の振動モードの振動を励振するための第1の交流信号を発生する第1の信号発生器と、第2の振動モードの振動を励振するための第2の交流信号を発生する第2の信号発生器と、
第1の交流信号と第2の交流信号の周波数が異なる周波数となるよう信号発生器の発生する周波数を設定し、
合成振動波の移動方向に応じて合成振動波の振動振幅に差を生じさせるよう第1の交流信号と第2の交流信号のうち少なくとも一方を制御する制御手段と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、振動装置の駆動回路、及び振動装置の駆動方法に関し、特に光学機器等の塵埃除去装置に用いられる振動装置の駆動回路及び駆動方法に関する。
【背景技術】
【0002】
近年、光学機器として、撮像装置では、光学センサの分解能が向上するにつれて、使用中に光学系に付着するゴミが撮影画像に影響を及ぼすようになってきた。このようなゴミを除去するため、特許文献1では、振動を付与することによってゴミを画像読み取り部から移動させる画像読取装置が提案されている。
また、特許文献2では、振動による防塵機構を備えたカメラが提案されている。
【0003】
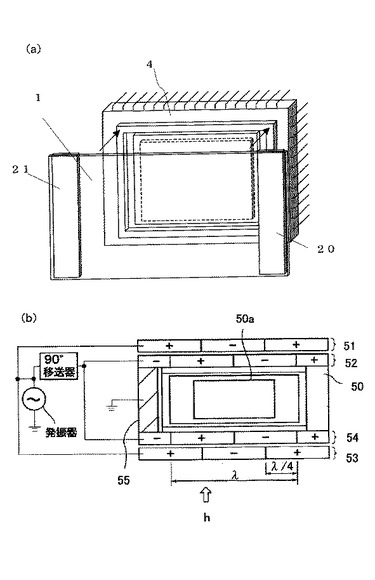
こここで、図19(a)を用いて、特許文献1に開示された振動装置の構成を説明する。
図19(a)において、1は透明な弾性体、20、21は圧電素子であり、弾性体1の両端の同一面に接着されている。
4は画像読取センサであり、弾性体1が画像読取センサ4の画像読取部を封止するように接合されている。
弾性体1上にゴミが付着すると画像読取部に結像される画像にゴミが写り込むが、これを圧電素子20、及び圧電素子21に交流電圧を印加することで弾性体1を振動させ、ゴミを画像読取に影響のある領域から排除する構成となっている。また、圧電素子20、圧電素子21には同一の周波数で位相の異なる交流電圧が印加され、弾性体1上に異なる次数の振動モードの定在波が同時に励振されるようになっている。
また、この異なる次数の定在波は一定の時間的位相差を持って振動するため弾性体1上には、進行性の振動波が形成され付着するゴミを振動により振るい落とす効果の他に、一定方向に搬送する効果も得られる構成となっている。
【0004】
つぎに、図19(b)を用いて、特許文献2に開示された防塵素子部の構成について説明する。
この防塵素子部は光学フィルタであるガラス板50を有する。光線は、ガラス板50内側の結像光線通過範囲50aを通過し、不図示の撮像素子に結像する。
また、ガラス板50には、圧電素子51、圧電素子52、圧電素子53および圧電素子54が固着されている。
各圧電素子とガラス板50の間には、グランド用の電気端子55が設けられている。
各圧電素子は長手方向に交互に分極方向の異なる区間(図中、「+」、「−」の表示)を有する。
圧電素子51および圧電素子53の長手方向の分極配置は同じである。また、圧電素子52および圧電素子54の長手方向の分極配置は同じである。
「−」と「+」の区間長さをλとすると、圧電素子52および圧電素子54の分極配置は、圧電素子51および圧電素子53に対して、それぞれλ/4だけ長手方向にずらした位置になっている。
圧電素子51および圧電素子53には、発振器から同位相の周期を有する電圧が印加される。
一方、圧電素子52および圧電素子54には、発振器からの信号を90°位相器で位相を90°変えた、周期を有する電圧が印加されている。
ガラス板50の表面に進行波を発生させた場合、進行波はガラス板50の表面を右側に進む。ガラス板50の表面に進行波が発生すると、ガラス板50の表面のどの質点においても、反時計回りの楕円運動が生じる。
これにより、ガラス板50の表面に付着した塵埃は、ガラス板50の表面を左側に移動し、結像光線通過範囲50aから除去される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−207170号公報
【特許文献2】特開2002−204379号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記従来例のものにおいては、つぎのような課題を有している。
すなわち、特許文献1のものでは、異なる次数の振動モードの共振周波数を、同じ周波数とすることは困難である。
そのため、同じ周波数で異なる次数の振動モードを加振し、双方の振動モードの振動を同程度の振幅にするには、共振周波数から離した周波数で加振する必要がある。その上、共振が利用出来ないため圧電素子に高電圧を印加する必要があった。
また、特許文献2のものでは、同じ次数で異なる位置的位相関係にある振動を発生させる場合にも大きな加振力が必要であり、圧電素子に高電圧を印加する必要があった。
【0007】
本発明は、上記課題を鑑み、異なる振動モードの振動の合成により、弾性体上を移動する振動波を発生させるに際し、
低エネルギーで該振動波を効率良く発生させ、該弾性体に接する被移動体を所定の方向に移動させることが可能となる振動装置の駆動回路、及び振動装置の駆動方法の提供を目的とする。
【課題を解決するための手段】
【0008】
本発明は、つぎのように構成した振動装置の駆動回路、及び振動装置の駆動方法を提供するものである。
本発明の振動装置の駆動回路は、第1の振動モードの振動と、前記第1の振動モードとは次数の異なる第2の振動モードの振動と、を弾性体上に励振し、前記弾性体上に前記第1の振動モードの振動と前記第2の振動モードの振動とを合成した合成振動波を形成する振動装置の駆動回路であって、
前記第1の振動モードの振動を励振するための第1の交流信号を発生する第1の信号発生器と、前記第2の振動モードの振動を励振するための第2の交流信号を発生する第2の信号発生器と、
前記第1の交流信号と前記第2の交流信号の周波数が異なる周波数となるよう前記信号発生器の発生する周波数を設定し、
前記合成振動波の移動方向に応じて前記合成振動波の振動振幅に差を生じさせるよう前記第1の交流信号と前記第2の交流信号のうち少なくとも一方を制御する制御手段と、を有することを特徴とする。
また、本発明の振動装置の駆動方法は、第1の振動モードの振動と、前記第1の振動モードとは次数の異なる第2の振動モードの振動と、を弾性体上に励振し、前記弾性体上に前記第1の振動モードの振動と前記第2の振動モードの振動とを合成した合成振動波を形成する振動装置の駆動方法であって、
前記第1の振動モードの振動を励振するための第1の交流信号と、前記第2の振動モードの振動を励振するための前記第1の交流信号と異なる周波数の第2の交流信号と、を発生するステップと、
前記合成振動波の移動方向に応じて前記合成振動波の振動振幅に差を生じさせるよう前記第1の交流信号と前記第2の交流信号のうち少なくとも一方を制御するステップと、を有することを特徴とする。
【発明の効果】
【0009】
本発明によれば、異なる振動モードの振動の合成により、弾性体上を移動する合成振動波を発生させるに際し、
低エネルギーで該合成振動波を効率良く発生させ、該弾性体に接する被移動体を所定の方向に移動させることが可能となる振動装置の駆動回路、及び振動装置の駆動方法を実現することができる。
【図面の簡単な説明】
【0010】
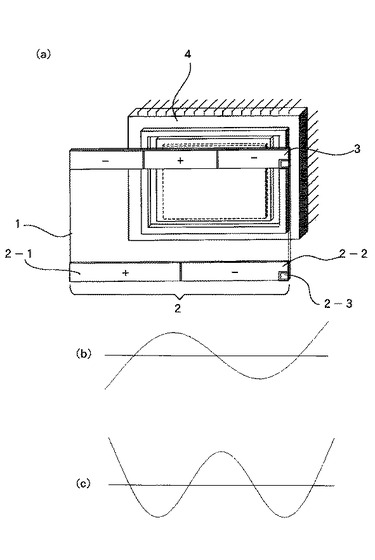
【図1】図1(a)は本発明の第1の実施形態における光学フィルタ周辺の構成を示す斜視図。図1(b)、(c)は光学フィルタの2次と3次の振動モードの振動形状を説明する図。
【図2】2次と3次の振動モードの振動が位相差0°の同じ周波数で振動した場合の合成振動波形の時間的変化を説明する図。
【図3】2次と3次の振動モードの振動が位相差90°の同じ周波数で振動した場合の合成振動波形の時間的変化を説明する図。
【図4】2次と3次の振動モードの振動が位相差180°の同じ周波数で振動した場合の合成振動波形の時間的変化を説明する図。
【図5】2次と3次の振動モードの振動が位相差270°の同じ周波数で振動した場合の合成振動波形の時間的変化を説明する図。
【図6】図6(a)は2次と3次の振動モードの振動が異なる周波数で振動した場合のそれぞれの次数の振動振幅と振動間の時間的位相差の変化を説明する図。図6(b)は2次と3次の振動モードの振動が異なる周波数で振動した場合に振動間の位相差が90°を中心とする領域と270°を中心とする領域とで振動振幅を変化させた場合の振動の様子を説明する図。図6(c)は2次と3次の振動モードの振動が異なる周波数で振動した場合に振動間の位相差が90°を中心とする領域と270°を中心とする領域とで振動振幅を変化させるための圧電素子に印加する電圧波形を説明する図。
【図7】図7(a)は本発明の第1の実施形態における振動装置の構成を示すブロック図。図7(b)は振動装置の各部の動作波形を示すタイミングチャート。
【図8】図8(a)は本発明の第1の実施形態における第2の例の振動装置の構成を示すブロック図。図8(b)は第2の例の振動装置の各部の動作波形を示すタイミングチャート。
【図9】図9(a)は振動装置の印加電圧波形の第1の例を示す図。図9(b)は振動装置の印加電圧波形の第2の例を示す図。図9(c)は振動装置の印加電圧波形の第3の例を示す図。
【図10】3次と5次の振動モードの振動が位相差90°の同じ周波数で振動した場合の合成振動波形の時間的変化を説明する図。
【図11】図11(a)は本発明の第1の実施形態における光学フィルタの第2の構成を示す図。図11(b)は光学フィルタの第3の構成を示す図。
【図12】図12(a)は本発明の第2の実施形態における振動装置の構成を示すブロック図。図12(b)は振動装置の各部の動作波形を示すタイミングチャート。
【図13】本発明の第2の実施形態の制御装置27の動作を説明するフローチャート。
【図14】本発明の第2の実施形態における光学フィルタの第2の構成を示す図。
【図15】本発明の第3の実施形態における振動装置の構成を示すブロック図。
【図16】本発明の第3の実施形態の制御手段36の動作を説明するフローチャート。
【図17】本発明の第3の実施形態における振動装置の各部の動作波形を示すタイミングチャート。
【図18】図18(a)は本発明の第4の実施形態における振動装置の構成を示すブロック図。図18(b)は振動装置の各部の動作波形を示すタイミングチャート。
【図19】図19(a)は特許文献1に開示された従来の振動装置の構成を示す図。図19(b)は特許文献2に開示された従来の振動装置の構成を示す図。
【発明を実施するための形態】
【0011】
以下に、本発明の実施形態について説明する。
[第1の実施形態]
図1(a)を用いて、第1の実施形態における画像入力センサの入力面に設けられ光学フィルタ上の塵埃を除去する振動装置の構成例について説明する。
図1(a)において、1は弾性体である光学フィルタ、2と3は光学フィルタ1を加振して光学フィルタ1上に付着する塵埃を除去する為の圧電素子(電気−機械エネルギー変換素子)、4は光学フィルタ1を透過して結像される画像を入力する為の画像入力センサである。
圧電素子2、3は複数の電極区画毎に図示した極性によって交互に分極方向が異なっており、電極の数に応じた次数(振動の腹の数)の面外振動を光学フィルタ1上に励振するようになっている。
圧電素子2に設けられた電極2−1と電極2−2では極性が反転している。圧電素子2の不図示の裏面は全面を覆う一枚の電極となっている。
電極2−1と電極2−2と不図示の裏面電極間に同じ電圧を印加すると分極方向に応じて歪みの増減が逆になるため、同じ交流電圧を印加すると長手方向に2つの腹を有する2次の曲げ振動(2次の振動モードの振動)が発生する。
また、電極2−3は不図示の裏面電極と導通するように構成されており電極2−3をグランド電位に接続することで圧電素子2の不図示の裏面電極をグランド電位に接続している。
【0012】
図1(b)は光学フィルタ1上に形成される定在波の波形である圧電素子2によって形成される2次の振動モードの波形を示している。
また、図1(c)は圧電素子3によって形成される3次の振動モードの波形を示している。
各振動波形は、光学フィルタ1の面外方向の曲げ振動であり、振動振幅が大きいと振動の腹の部分は大きな加速度を有するため腹付近に付着した塵埃は光学フィルタ1の面外方向に飛ばされ除去される。
そこで、2次と3次の振動モードは腹の位置が重ならない事を利用して両方の面外振動を十分大きな振動振幅で発生させれば光学フィルタ1上の全ての領域で塵埃を除去することが可能となる。
ただ、光学フィルタ1上から付着力に打ち勝って塵埃を弾き飛ばすには大きな加速度で振動させる必要があることや、光学フィルタ1の画像通過面に対して垂直方向に弾き飛ばすため一旦弾き飛ばしても再度付着する場合があった。
このようなことから、上記した特許文献1では、光学フィルタ1上を移動する波を発生させ、塵埃を光学フィルタ1の画像通過面上を接線方向に搬送する塵埃除去方法が提案されている。この方法では、上記2次と3次の振動モードの面外振動を同じ周波数で振動させると共に、時間的振動の位相差を90°程度ずらすことで光学フィルタ1上を接線方向に移動する曲げ振動を発生させている。
しかし、2次と3次の振動モードの持つ固有振動数は通常異なるため、同じ力で同じ振動周波数で加振しつつ同程度の振動振幅を得るためには、それぞれを単独にそれぞれの固有振動数で加振する場合と比較して、小さな振動振幅しか得られない。2次と3次の振動モードにおいては、次数が大きいほど高い周波数となる。
【0013】
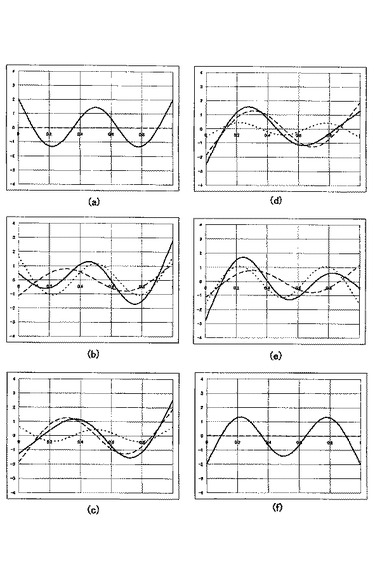
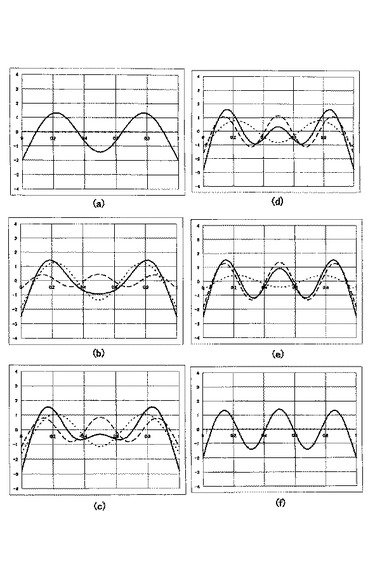
図2〜図5は、2次の振動モードと3次の振動モードの波形を、同時に同じ周波数で発生させた場合の合成振動波形(2次の振動モードの振動と3次の振動モードの振動とを合成した振動波形)を示す図である。
横軸は光学フィルタ1の長手方向の位置、縦軸は光学フィルタ1上の面外方向の振動振幅を示している。
図2は2次の振動モードと3次の振動モードの振動間の時間的位相差が0°の場合の合成振動波形を示している。
また、図3は位相差90°、図4は位相差180°、図5は位相差270°の場合を、それぞれ示している。
図2〜図5の各図の(a)〜(f)は時間的進行を示している。それぞれ破線が2次の振動モードの振動波形、点線が3次の振動モードの振動波形、実線が2次と3次の振動モードの合成振動波形を示している。
図2(位相差0°)と図4(位相差180°)の合成振動波形の波頭位置の時間的変化を見ると常に同じ位置に在るのに対し、図3(位相差90°)と図5(位相差270°)の合成振動波形の波頭位置は時間的に移動していることがわかる。
このように、2次と3次の振動モードの振動波形が時間的に90°又は270°近傍にあると合成振動波形の波頭位置はそれぞれ逆方向に移動し、0°又は180°近傍にあると合成振動波形の波頭位置は移動しないことがわかる。
【0014】
図6(a)は、2次の振動モードと3次の振動モードの振動振幅の時間変化を示す図で、破線の正弦波が2次の振動モードの振動振幅、実線の正弦波が3次の振動モードの振動振幅を示している。
2次の振動モードと3次の振動モードの振動が各固有振動数近傍の周波数で振動しているため、2次の振動モードと3次の振動モードの振動間の時間的位相差が時間と共に変化している。
直線的に変化する実線は両振動モードの振動間の時間的位相差の変化を示しており、2次と3次の振動モードの固有振動数の差に応じた一定の変化率で位相差が変化している。
この様な状態では2次と3次の振動モードによる合成振動波形の波頭の位置は位相差が90°と270°に近づくとそれぞれ反対方向に移動することを繰り返すようになる。
そのため、光学フィルタ1上に付着する塵埃は同じ位置を行ったりきたりするだけで振動によって表面から弾き飛ばされる塵埃の他は光学フィルタ1上から排出されない状態となる。
【0015】
そこで、本実施形態では、2次と3次の振動モードの振動間の時間的位相差が90°の時と270°の時で、合成振動波の振幅に一定の差が生じるよう加振力を変化させる。
このようにすることで、合成振動波の波頭の移動方向によって合成振動波の振動振幅に差が生じ、光学フィルタ1上(弾性体上)を移動する振動波を低電圧の印加により効率良く発生させることができ、光学フィルタ1上の塵埃を一定方向に搬送することが可能となる。
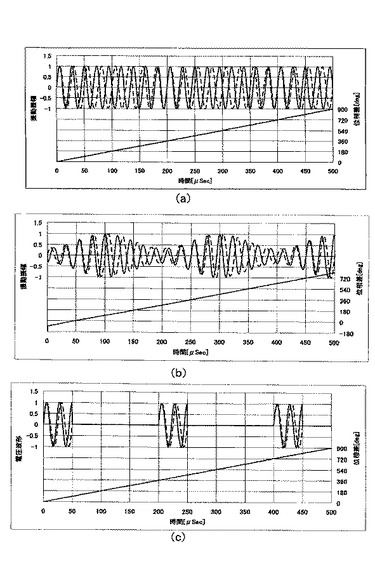
図6(b)は、この時の振動振幅の変化の様子を示したものである。図6(a)と同様に破線の正弦波が2次の振動モードの振動振幅、実線の正弦波が3次の振動モードの振動振幅を示しており、直線的に変化する実線は両振動モードの時間的位相差の変化を示している。
このように、2次と3次の振動モードの振動振幅の時間的変化が、位相差が90°近傍の時に大きく、位相差が270°近傍の時に小さくなるように変化する。そのため、位相差が90°近傍の時の塵埃の移動量の方が位相差が270°近傍の時の移動量より多くなり、最終的には光学フィルタ1上の塵埃は一定方向に移動し光学フィルタ1上から排除される。
図6(c)は、この時に実際に圧電素子2、3へ印加する交流電圧(交流信号)の波形を示す図で、破線の正弦波が圧電素子2への印加電圧波形、実線の正弦波が圧電素子3への印加電圧波形の例を示している。
直線的に変化する実線は両印加電圧間の時間的位相差の変化を示している。印加電圧は一定の期間だけ出力され一定の周期単位で繰り返すように出力されており、両印加電圧間の位相差が0°から90°の間だけ印加電圧が発生している。この周期は2次の振動モードの固有振動数と3次の振動モードの固有振動数間の差の周波数の周期で表すことが出来る。
【0016】
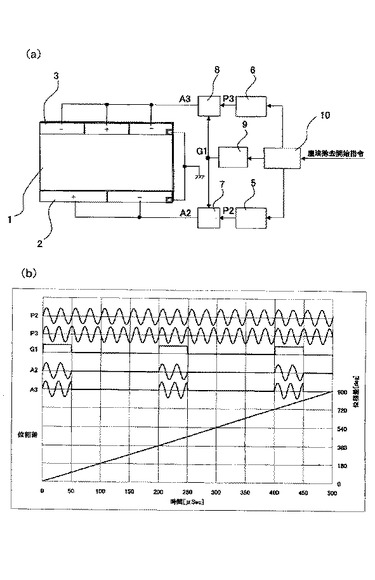
図7(a)は、本実施形態における以上のような印加電圧を発生するための駆動回路の構成を示すブロック図である。
5は2次の振動モードの振動を励振するための固有振動数f2rの交流信号P2を発生する信号発生器(第1の信号発生器)、6は3次の振動モードの振動を励振するための固有振動数f3rの交流信号P3を発生する信号発生器(第2の信号発生器)である。
9は固有振動数f3rと固有振動数f2rの差であるf3r−f2rの周波数のパルスで所定のパルス幅のパルス信号G1を発生するゲート信号発生器である。なお、固有振動数f2r及び固有振動数f3rの値は不図示の振動振幅評価手段によって交流信号P2、P3に対する光学フィルタ1の振動状態を評価することで求めておく。
7、8は乗算器で、信号発生器5及び信号発生器6の信号をゲート信号(制御信号)でON/OFFした信号A2、A3を出力する動作を行っている。
制御手段10は信号発生器5と6及びゲート信号発生器9の動作を、不図示の指令手段からの塵埃除去開始指令に応じて動作を制御している。
つまり、制御手段10は、信号発生器5及び6が発生する交流信号の周波数を設定し、信号発生器5及び6に指令を出す。また、制御手段10は、信号発生器5と6で発生した交流信号P2と交流信号P3の振幅を制御するための制御信号をゲート信号発生器9に出力している。
図7(b)は、本実施形態における各部の動作波形を示すタイミングチャートである。図7(b)では、信号発生器5及び信号発生器6の交流信号P2、P3は、ゲート信号発生器9の出力信号G1により乗算器7、8によってON/OFFされ、出力信号A2、A3が出力される。
出力信号A2と出力信号A3の位相関係は直線的に変化する位相差グラフより、約0°から90°の間だけ信号が発生していることがわかる。
【0017】
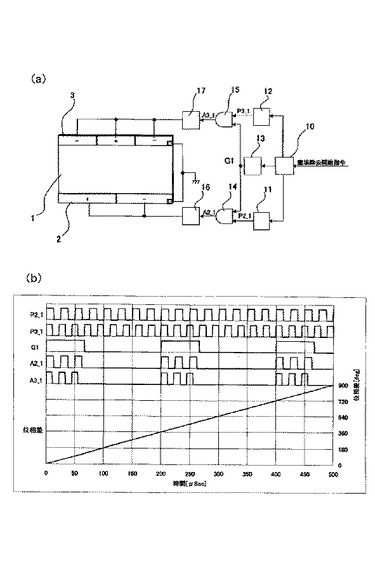
図8(a)は、本実施形態における別の駆動回路の構成例を示すブロック図である。11は2次の振動モードの固有振動数f2rのパルス信号P2_1を発生するパルス発生器(信号発生器)、12は3次の振動モードの固有振動数f3rのパルス信号P3_1を発生するパルス発生器(信号発生器)である。
13は固有振動数f3rと固有振動数f2rの差であるf3r−f2rの周波数のパルスで所定のパルス幅のパルス信号G1を発生するゲート信号発生器である。
14、15は論理AND素子で、パルス発生器11及びパルス発生器12の信号をゲート信号(制御信号)G1でON/OFFする動作を行っている。
16、17は論理AND素子の出力パルスを電力増幅するための増幅器である。増幅器16、17は論理AND素子14、15の出力信号であるA2_1、A3_1を電力増幅して圧電素子2、3に印加する交流電圧(交流信号)を出力している。
本構成例においても、制御手段10は、パルス発生器11及び12が発生するパルス信号の周期(つまり2次と3次の振動モードの振動を励振するための交流信号の周波数に対応する)を設定してパルス発生器11及び12に指令を出す。また、制御手段10は、パルスP2_1とパルス信号P2_1の振幅を制御するための制御信号をゲート信号発生器13に出力している。
図8(b)は、各部の動作波形を示すタイミングチャートである。図8(b)では、パルス発生器11及びパルス発生器12及びゲート信号発生器13は、制御手段10によって動作が制御され、出力信号P2_1、P3_1及びゲート信号G1を出力する。
そして、これらの信号を論理AND素子14、15に入力することによって出力信号A2_1、A3_1を出力している。
信号A2_1と信号A3_1の位相関係は直線的に変化する位相差グラフより約0°から120°の間だけ信号が発生していることがわかる。
また、図8(a)の例では圧電素子2及び圧電素子3へ信号A2_1及び信号A3_1を直接電力増幅して印加しているが、インダクタ素子等を介して印加することで印加電圧波形を滑らかにするよう構成しても良い。
【0018】
また、上記例では交流電圧のON/OFFによって光学フィルタ1上を移動する合成振動波の振動振幅を移動方向に応じて増減させていたが、完全にOFFしなくても合成振動波の振動振幅は増減させることが出来る。
図9(a)、図9(b)に、その際の印加電圧波形を示す。図9(a)は印加電圧の振幅を位相差が0°から90°までを大きくしその他の区間では小さくした例である。
図9(b)は印加電圧の振幅を正弦的に変化させた例である。
また、上記例では印加電圧を0°から90°までを大きくしたが、他の位相差でも合成振動波の振動振幅に差を生じさせれば、これに限られるものではない。
例えば、各振動モードの振動間の位相差が0°から180°の間と、180°から360°までの間の合成振動波の振動振幅の平均値に差があれば、合成振動波の移動方向に応じて振幅差が発生するため、特に0°から90°に限定するものではない。つまり、2次の振動モードの交流信号の周波数と3次の振動モードの交流信号の周波数との差に応じた周期で、合成振動波の振動振幅に差を生じることができれば、結果的に送り量に差が生じ、塵埃は一定方向に移動する。
例えば、45°から120°でも、合成振動波の振動振幅に差が発生するならこれでも良いことは当然である。
また、上記例では2次と3次の振動モードの振動振幅(つまり2次と3次の振動モードを励振するための交流信号の振幅)を同様に振幅変化させていたが、2次と3次の振動モードの振動とで異なる振幅変化をさせたり、一方のみの振幅を変化させたりしても良いことは当然である。
図9(c)に、一方の印加電圧(交流信号)の振幅のみを変化させた場合の印加電圧波形を示す。このように一方の電圧振幅のみ変化させた場合でも合成振動波の移動方向によって振幅差が発生するから塵埃は一方方向に搬送される。
また、今まで説明した例では第1の振動モードとして2次の振動モードを、第2の振動モードとして3次の振動モードの振動を発生させたが他の次数でも良い。例えば、第1の振動モードとして3次の振動モードを、第2の振動モードとして5次の振動モードの振動を発生させた場合、光学フィルタ1の長手方向の中心で振動の腹の位置が重なるため、この中心位置では塵埃の搬送が出来ないが、振動が重なるため大きな振幅となり塵埃を弾き飛ばしやすい。また、塵埃は振動の節の位置に集まりやすいためこの中心位置から長手方向の両端方向へ節の位置まで塵埃が移動する。
ここで、3次と5次の振動モードの振動波形間の位相差を90°又は270°に近づけていくと波頭の移動がこの中心位置から長手方向の両端へ向けて移動したり逆に中心に向かって移動するようになる。
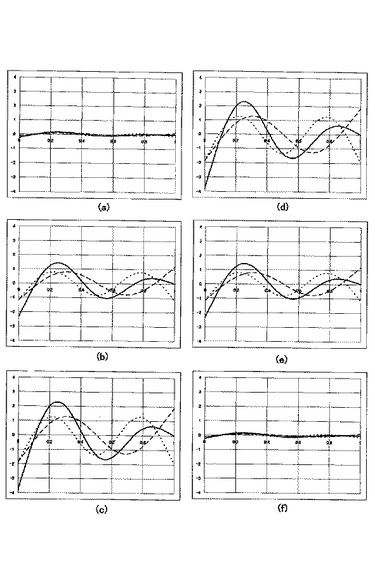
そのため、この移動によって塵埃が光学フィルタ1の長手方向の両端まで移動し塵埃を光学フィルタ上から除去することが出来る。この時の振動の様子を図10に示す。
【0019】
図10(a)〜(f)は、時間的進行を示している。
点線が3次、破線が5次の振動モードの振動波形の変化、実線が合成振動波形を示している。
この図より3次形状の合成振動波形が中心部の腹が分かれて5次形状に変化し更に両端部の腹が両端に移動して行き3次形状の合成振動波形に変化して行く様子がわかる。
また、本実施例では圧電素子2及び圧電素子3に複数の電極パターンを設けそれぞれの電極パターンに対応する振動モードの振動波形を発生させた。
しかし、次数が増加すると電極数が増え電極間等加振に有効に利用できない領域が増える等して効率が低下する可能性がある。
【0020】
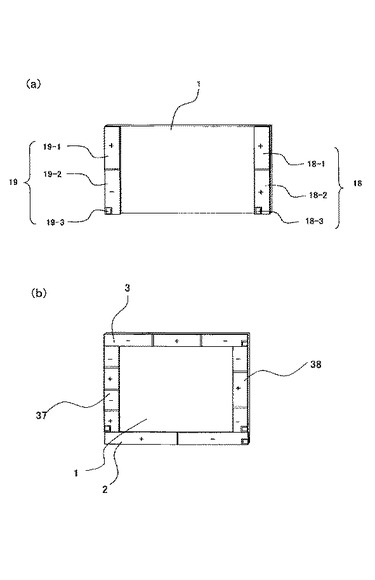
図11(a)は、このような次数の高い振動を少ない電極数で発生させる場合の光学フィルタの第2の構成を示す図である。
今まで説明した例では圧電素子2、圧電素子3を光学フィルタ1の長手方向に沿って紙面上下に配置し独立した次数の振動モードを発生させたが、本実施例では光学フィルタ1の長手方向の両端に独立した圧電素子18、19を設けている。このような配置で圧電素子を設けた場合、圧電素子18と圧電素子19に同相の加振力を印加すると奇数次の振動モードの加振が出来、逆相の加振力を印加すると偶数次の振動モードの加振が出来る。
圧電素子18及び圧電素子19はそれぞれ2つの電極に分かれており、電極18−1と電極19−1を用いて同相の加振力を発生させることで奇数次の振動モードの振動を発生させることが出来る。
また、電極18−2と電極19−2を用いて逆相の加振力を発生されることで偶数次の振動モードの振動を発生させることが出来る。
電極18−3及び電極19−3は圧電素子18及び圧電素子19のそれぞれの裏面電極と接続されており、グランド電位に接続される。
この構成でN次とN+1次の振動モードの振動を発生させることでそれぞれの振動の腹の位置が重ならない振動モードを発生させることが出来るから上記例と同様に塵埃を搬送することが可能となる。
次数の高い振動モードの振動を利用することは、振動周波数が高周波なので可聴音を避けることが出来る利点がある。
また、3つ以上の振動モードの振動を合成した場合でも振動波の移動方向に応じて振動振幅に差を生じるようにそれぞれの振動モードの振動の加振力を制御することで同様の効果が得られることは当然である。
上記例は紙面横方向に塵埃を搬送していたが、これを90°回転すれば上下方向に搬送することが出来る。
そこで、光学フィルタ1の4辺にそれぞれ圧電素子を設ければ、移動方向を上下左右の選択や斜め方向への搬送も自由に行うことが出来る。
図11(b)は、光学フィルタ1の4辺に圧電素子を設けた光学フィルタの第3の構成を示すものである。
【0021】
また、本実施例では、光学フィルタ1上に付着した塵埃を除去する例を示したが光学フィルタ以外でも加振によって振動する弾性体であれば、上記原理を用いて付着物を除去或いは搬送することが出来ることは当然のことである。
また、レーザープリンタのトナー等の光学部材上の粉体や、インク等の液体を積極的に搬送する用途にこのような振動装置を用いても良い。
【0022】
[第2の実施形態]
第2の実施形態として、第1の実施形態と異なる形態の構成例について説明する。
上記第1の実施形態では圧電素子18及び圧電素子19に2つの電極パターンを設け独立した電極で異なる次数の振動モードの振動を発生させていた。
これに対し、本実施形態では光学フィルタ1の長手方向の両端に1つの加振用電極を持つ独立した圧電素子20、21を設けている。
図12(a)を用いて、本実施例の光学フィルタの構成について説明する。
圧電素子20及び圧電素子21には交流電圧を印加するための電極20−1、電極21−1とグランド電位を接続する電極20−2、電極21−2が設けられている。この圧電素子20及び圧電素子21を用いてN次とN+1次の振動モードの振動を発生させるためには、圧電素子20及び圧電素子21に印加する交流電圧に両方の振動モードの固有振動数の信号を重畳させて印加する必要がある。
【0023】
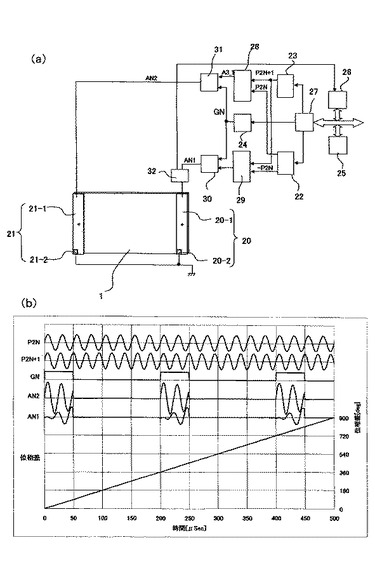
図12(a)は、本実施形態における回路構成を示すブロック図である。
22は2N次の振動モードの固有振動数f2Nの交流信号P2N、−P2Nを発生する信号発生器、23は2N+1次の振動モードの固有振動数f2N+1の交流信号P2N+1を発生する信号発生器である。
24は固有振動数f2N+1とf2N差である(f2N+1)−(f2N)の周波数fGのパルスで所定のパルス幅のパルス信号GNを発生するゲート信号発生器である。
25は記憶装置で信号発生器22及び信号発生器23へ設定する周波数が記憶されている。
26は後述する電流検出器32の出力から圧電素子20の静電容量を計測する静電容量評価装置、27は制御装置である。
記憶装置25に記憶された周波数情報は温度によって変化する圧電素子20の静電容量C20に応じたテーブル構成になっている。
圧電素子20に接続された静電容量評価装置26で計測した静電容量に応じて記憶装置25から制御装置27が読み出し、信号発生器22及び信号発生器23が出力する信号の周波数を設定している。
28は加算器で交流信号P2Nと交流信号P2N+1を加算する加算器で29は交流信号−P2Nと交流信号P2N+1を加算する加算器である。
30、31は乗算器で加算器28及び加算器29の信号をゲート信号でON/OFFした信号AN1、AN2を出力し圧電素子20及び21に交流電圧を印加している。
32は乗算器30の出力と圧電素子20の間に流れる電流を検出するための電流検出器である。
図12(b)は、本実施形態における各部の動作波形を示すタイミングチャートである。
信号発生器22及び信号発生器23の出力信号P2N、−P2N、P2N+1を加算した信号はゲート信号発生器24の出力信号GNによって乗算器30、31によってON/OFFされ、出力信号AN1、AN2が出力される。
信号AN1と信号AN2とも合成された交流電圧となっている。
【0024】
図13に制御装置27の動作を説明するフローチャートを示す。
不図示の指令手段から塵埃除去の開始を指令されると制御装置27はまず圧電素子20の静電容量C20を計測するよう静電容量評価装置26に指令し、静電容量C20を求める。
次に、記憶装置25に記憶された情報から静電容量C20に対応するN次の固有振動数f2NとN+1次の固有振動数f2N+1を関数G1及びG2を用いて求める。
静電容量C20は圧電素子20及び21の温度によって変化する。
温度によって変化する各振動モードの固有振動数は、静電容量C20に対応させて記憶装置25に記憶されており、そのため温度が変化しても最適な加振周波数を選択することが出来る。
そして、これから固有振動数f2N+1と固有振動数f2Nの差の周波数fGを求め、信号発生器22、23及びゲート信号発生器24に周波数を設定し信号出力を開始する。
次に、不図示の画像入力センサーにより光学フィルター1を通過する画像情報を入力して光学フィルタ1上の塵埃による画像欠陥を検出して塵埃の付着状況を確認し、塵埃除去が完了したかどうかを確認する。
塵埃除去が完了していないならゲート信号発生器24にゲート信号GNのタイミングを所定量ずらすことでゲート信号のON区間の信号発生器22と信号発生器23の出力信号P2NとP2N+1間の位相差範囲を所定位相変化させる。
そして、繰り返し不図示の画像入力センサーによる塵埃付着状況の評価とゲート信号GNのタイミングのシフトを行い塵埃が所定量以下になるか一定時間以上繰り返すかすると塵埃除去動作を終了する。
ここで、ゲート信号GNの位相をシフトしていくのは記憶装置25によって温度による各固有振動数の変化をキャンセルしようとしても完全ではなく、ゲート信号GNと出力信号P2N、出力信号P2N+1との間の最適な位相関係は状況により変化するからである。
【0025】
また、本実施形態では光学フィルタ1は長方形であったが円形であっても良い。
図14は、円盤状の光学フィルタの外周部に圧電素子を配置した例を示す図である。33は透明な光学フィルタであり、34は光学フィルタ33の裏面の周上に接着された円環状の圧電素子である。
光学フィルタ33には圧電素子34に印加する交流電圧の周波数に応じて次数の異なる同心円状に複数の波を有する振動モードの振動が発生する。
そこで、次数が1異なる振動モードを使って上記例と同様にして光学フィルタ33上に付着する塵埃を除去することが可能である。
圧電素子34は表裏1枚ずつの電極で構成されており、裏面の電極は光学フィルタ33上に設けられた不図示の透明電極によってグランド電位に接続されている。
このように、交流電圧を印加するための電極を1つしか持たないため同時に異なる次数の振動モードの振動を発生させるには両振動モードを発生させるための異なる周波数の交流信号を重畳した信号を圧電素子34に印加する必要がある。
そのような合成振動波形は本実施形態の駆動回路を用いれば発生することが可能である。
【0026】
[第3の実施形態]
第3の実施形態として、上記各実施形態と異なる形態の構成例について説明する。
以上で説明した第1及び第2の実施形態では、圧電素子に印加する交流電圧の振幅を変化させることで、光学フィルタ上を移動する合成振動波の移動方向に応じて合成振動波の振動振幅を変化させる構成であった。
これに対して、本実施形態では印加する交流電圧の周波数を変化させるように構成される。
図15は本実施形態の構成を示す図である。
2−4は圧電素子2に設けられた振動検出用電極で圧電素子3で加振することで励起される3次の振動モードの振動の腹の位置に設けられており、3次の振動モードの振動状態に応じた振動波形を検出することが出来る。
35は振動検出用電極2−4の出力する交流信号の振幅を検出するための振幅検出手段である。
振幅検出手段35で検出された振幅は後述する制御手段36に入力されており、3次の振動モードの固有振動数を検出する用途に使用されている。
本実施形態では3次の振動モードの振動の腹の位置のみに振動検出用電極を設けたが2次の振動モードの振動の腹の位置あるいは双方の腹の位置に設けても良い。
また、2次の振動モードの腹の位置と3次の振動モードの腹の位置の中間に設けることで双方の振動を1つの振動検出電極で検出するようにしても良い。
このように振動検出用電極2−4を設けることで塵埃除去動作の前に事前に各振動モードの固有振動数を検出し除去動作を開始することが出来る。
制御手段36は信号発生器6及び信号発生器5に出力周波数を指令しており、振幅検出手段35で検出した2次の振動モードの固有振動数f2rと3次の振動モードの固有振動数f3rを基準として設定される。
信号発生器5にはf2r〜f2r+Δfの範囲、信号発生器6にはf3r〜f3r+Δfの範囲で周期的に変化する周波数を逐次指令している。
出力周波数の変化の周波数はf3rとf2rの差の周波数に設定され変化の大きさは双方とも同じに設定される。
【0027】
図16に、制御手段36の動作のフローチャートを示す。
まず、最初に信号発生器6に予め決められた周波数範囲の交流信号を高い周波数から低い周波数へ向け掃引して発生させる。
そして、振動検出用電極2−4から出力される交流電圧の振幅を振幅検出手段35で検出し3次の振動モードの固有振動数f3rを検出する。
次に、3次の振動モードの固有振動数f3rから予め求められている3次の振動モードの固有振動数f3rと2次の振動モードの固有振動数f2rとの差fdを減算し、2次の振動モードの固有振動数f2rを求める。そして、信号発生器5の出力周波数f2、信号発生器6の出力周波数f3を時間をtとして以下の式で表されるように逐次設定する。

【0028】
これにより、信号発生器6及び信号発生器5の出力信号はそれぞれf3r〜f3r+Δfの範囲、f2r〜f2r+Δfの範囲で、周波数fdで周期的に周波数が変化するようになる。
すると、加振周波数がそれぞれの次数の振動モードの固有振動数に近い時に大きく塵埃が移動し、共振より高い周波数になると塵埃の移動量が減り移動方向による移動量の偏りが発生し塵埃が一方の移動方向に搬送されるようになる。
そして、定期的に不図示の画像センサによる塵埃除去状況を判断し、所定の時間あるいは塵埃除去状況に達したら信号発生器6及び信号発生器5の出力信号を停止させるように動作する。
【0029】
図17は、出力信号P2、出力信号P3の間の周波数差を一定に保ちつつ周波数を変化させた場合の波形を示す図である。
出力信号P2の周波数はf2r〜f2r+Δfの間で正弦的に変化しており出力信号P3の周波数はf3r〜f3r+Δfの間で正弦的に変化している。
出力信号P2及び出力信号P3の周波数変化は同期して同じ振幅で変化しており周波数が低く、各振動モードの固有振動数近傍では光学フィルタ1上の振動振幅は大きくなる。
そして、周波数が高くなると固有振動数から離れることで各振動モードの振動振幅が小さくなる。
また、2つの信号発生器の出力する交流信号の周波数差を保ちながら周波数を同時に掃引しているので、各振動モード間の位相差が上記第1及び第2の実施形態と同様に直線的に変化している。
【0030】
[第4の実施形態]
第4の実施形態として、上記第3の実施形態と異なる形態の構成例について説明する。
第3の実施形態では、3次の振動モードの固有振動数f3rを振動検出用電極2−4の出力信号を用いて求めることで信号発生器6及び信号発生器5の出力周波数の範囲を設定していた。
これに対して、本実施形態では、予め周波数特性を検出しない方法について説明する。
本実施形態は各振動モードの固有振動数を検出する代わりに固有振動数f2rと固有振動数f3rとの差fdをあらかじめ求めておき、周波数差をfdに設定した2つの交流電圧信号P2、P3を出力している。
それぞれの次数の固有振動数を含む範囲で周波数を掃引することで必ず加振周波数がそれぞれの次数の固有振動数を通るようにしている。
温度変動や個体差があっても相対的な周波数は変化が少ないことから予め周波数差fdを設定しても周波数掃引時にはほとんど同時にそれぞれの次数の固有振動数を通過する。
【0031】
図18(a)は、本実施形態の構成を示す図である。
制御装置27は信号発振器6及び信号発振器5に周波数差fdを保ちつつ周波数を掃引する設定を行いながら周波数fdのタイミングでゲート信号G1を発生するようにゲート信号発生器9の設定を行う。
信号発生器6及び信号発生器5の出力信号P3及びP2は乗算器7及び乗算器8でゲート信号G1によってON/OFFされ圧電素子3及び圧電素子2に印加される。
図18(b)に各部の動作波形のタイミングチャートを示す。
信号P2及び信号P3の周波数が高い周波数から低い周波数に掃引されながら所定のタイミングでゲート信号G1でON/OFFされ、信号A2及び信号A3が出力されている。
信号A2と信号A3間の位相差はゲート信号G1のタイミングでいつも0°から90°の間となっているのがわかる。
【0032】
以上の各実施形態では、弾性体上を移動する振動波を、低エネルギーで効率良く発生させることができる本発明の振動装置を、光学機器であるカメラに適用した例について説明したが、本発明はこれらに限定されるものではない。
本発明の振動装置は、光学機器として、カメラ、ファクシミリ装置、スキャナ、プロジェクタ、複写機、レーザビームプリンタ、インクジェットプリンタ、レンズ、双眼鏡、画像表示装置などの塵埃除去装置として適用可能である。
さらには、本発明の振動装置は、塵埃を除去する必要がある、光学機器以外の様々な装置にも適用可能である。
【符号の説明】
【0033】
1:光学フィルタ
2、3:圧電素子
4:画像入力センサ
5、6:信号発生器
7、8:乗算器
9:ゲート信号発生器
10:制御手段
【技術分野】
【0001】
本発明は、振動装置の駆動回路、及び振動装置の駆動方法に関し、特に光学機器等の塵埃除去装置に用いられる振動装置の駆動回路及び駆動方法に関する。
【背景技術】
【0002】
近年、光学機器として、撮像装置では、光学センサの分解能が向上するにつれて、使用中に光学系に付着するゴミが撮影画像に影響を及ぼすようになってきた。このようなゴミを除去するため、特許文献1では、振動を付与することによってゴミを画像読み取り部から移動させる画像読取装置が提案されている。
また、特許文献2では、振動による防塵機構を備えたカメラが提案されている。
【0003】
こここで、図19(a)を用いて、特許文献1に開示された振動装置の構成を説明する。
図19(a)において、1は透明な弾性体、20、21は圧電素子であり、弾性体1の両端の同一面に接着されている。
4は画像読取センサであり、弾性体1が画像読取センサ4の画像読取部を封止するように接合されている。
弾性体1上にゴミが付着すると画像読取部に結像される画像にゴミが写り込むが、これを圧電素子20、及び圧電素子21に交流電圧を印加することで弾性体1を振動させ、ゴミを画像読取に影響のある領域から排除する構成となっている。また、圧電素子20、圧電素子21には同一の周波数で位相の異なる交流電圧が印加され、弾性体1上に異なる次数の振動モードの定在波が同時に励振されるようになっている。
また、この異なる次数の定在波は一定の時間的位相差を持って振動するため弾性体1上には、進行性の振動波が形成され付着するゴミを振動により振るい落とす効果の他に、一定方向に搬送する効果も得られる構成となっている。
【0004】
つぎに、図19(b)を用いて、特許文献2に開示された防塵素子部の構成について説明する。
この防塵素子部は光学フィルタであるガラス板50を有する。光線は、ガラス板50内側の結像光線通過範囲50aを通過し、不図示の撮像素子に結像する。
また、ガラス板50には、圧電素子51、圧電素子52、圧電素子53および圧電素子54が固着されている。
各圧電素子とガラス板50の間には、グランド用の電気端子55が設けられている。
各圧電素子は長手方向に交互に分極方向の異なる区間(図中、「+」、「−」の表示)を有する。
圧電素子51および圧電素子53の長手方向の分極配置は同じである。また、圧電素子52および圧電素子54の長手方向の分極配置は同じである。
「−」と「+」の区間長さをλとすると、圧電素子52および圧電素子54の分極配置は、圧電素子51および圧電素子53に対して、それぞれλ/4だけ長手方向にずらした位置になっている。
圧電素子51および圧電素子53には、発振器から同位相の周期を有する電圧が印加される。
一方、圧電素子52および圧電素子54には、発振器からの信号を90°位相器で位相を90°変えた、周期を有する電圧が印加されている。
ガラス板50の表面に進行波を発生させた場合、進行波はガラス板50の表面を右側に進む。ガラス板50の表面に進行波が発生すると、ガラス板50の表面のどの質点においても、反時計回りの楕円運動が生じる。
これにより、ガラス板50の表面に付着した塵埃は、ガラス板50の表面を左側に移動し、結像光線通過範囲50aから除去される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−207170号公報
【特許文献2】特開2002−204379号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記従来例のものにおいては、つぎのような課題を有している。
すなわち、特許文献1のものでは、異なる次数の振動モードの共振周波数を、同じ周波数とすることは困難である。
そのため、同じ周波数で異なる次数の振動モードを加振し、双方の振動モードの振動を同程度の振幅にするには、共振周波数から離した周波数で加振する必要がある。その上、共振が利用出来ないため圧電素子に高電圧を印加する必要があった。
また、特許文献2のものでは、同じ次数で異なる位置的位相関係にある振動を発生させる場合にも大きな加振力が必要であり、圧電素子に高電圧を印加する必要があった。
【0007】
本発明は、上記課題を鑑み、異なる振動モードの振動の合成により、弾性体上を移動する振動波を発生させるに際し、
低エネルギーで該振動波を効率良く発生させ、該弾性体に接する被移動体を所定の方向に移動させることが可能となる振動装置の駆動回路、及び振動装置の駆動方法の提供を目的とする。
【課題を解決するための手段】
【0008】
本発明は、つぎのように構成した振動装置の駆動回路、及び振動装置の駆動方法を提供するものである。
本発明の振動装置の駆動回路は、第1の振動モードの振動と、前記第1の振動モードとは次数の異なる第2の振動モードの振動と、を弾性体上に励振し、前記弾性体上に前記第1の振動モードの振動と前記第2の振動モードの振動とを合成した合成振動波を形成する振動装置の駆動回路であって、
前記第1の振動モードの振動を励振するための第1の交流信号を発生する第1の信号発生器と、前記第2の振動モードの振動を励振するための第2の交流信号を発生する第2の信号発生器と、
前記第1の交流信号と前記第2の交流信号の周波数が異なる周波数となるよう前記信号発生器の発生する周波数を設定し、
前記合成振動波の移動方向に応じて前記合成振動波の振動振幅に差を生じさせるよう前記第1の交流信号と前記第2の交流信号のうち少なくとも一方を制御する制御手段と、を有することを特徴とする。
また、本発明の振動装置の駆動方法は、第1の振動モードの振動と、前記第1の振動モードとは次数の異なる第2の振動モードの振動と、を弾性体上に励振し、前記弾性体上に前記第1の振動モードの振動と前記第2の振動モードの振動とを合成した合成振動波を形成する振動装置の駆動方法であって、
前記第1の振動モードの振動を励振するための第1の交流信号と、前記第2の振動モードの振動を励振するための前記第1の交流信号と異なる周波数の第2の交流信号と、を発生するステップと、
前記合成振動波の移動方向に応じて前記合成振動波の振動振幅に差を生じさせるよう前記第1の交流信号と前記第2の交流信号のうち少なくとも一方を制御するステップと、を有することを特徴とする。
【発明の効果】
【0009】
本発明によれば、異なる振動モードの振動の合成により、弾性体上を移動する合成振動波を発生させるに際し、
低エネルギーで該合成振動波を効率良く発生させ、該弾性体に接する被移動体を所定の方向に移動させることが可能となる振動装置の駆動回路、及び振動装置の駆動方法を実現することができる。
【図面の簡単な説明】
【0010】
【図1】図1(a)は本発明の第1の実施形態における光学フィルタ周辺の構成を示す斜視図。図1(b)、(c)は光学フィルタの2次と3次の振動モードの振動形状を説明する図。
【図2】2次と3次の振動モードの振動が位相差0°の同じ周波数で振動した場合の合成振動波形の時間的変化を説明する図。
【図3】2次と3次の振動モードの振動が位相差90°の同じ周波数で振動した場合の合成振動波形の時間的変化を説明する図。
【図4】2次と3次の振動モードの振動が位相差180°の同じ周波数で振動した場合の合成振動波形の時間的変化を説明する図。
【図5】2次と3次の振動モードの振動が位相差270°の同じ周波数で振動した場合の合成振動波形の時間的変化を説明する図。
【図6】図6(a)は2次と3次の振動モードの振動が異なる周波数で振動した場合のそれぞれの次数の振動振幅と振動間の時間的位相差の変化を説明する図。図6(b)は2次と3次の振動モードの振動が異なる周波数で振動した場合に振動間の位相差が90°を中心とする領域と270°を中心とする領域とで振動振幅を変化させた場合の振動の様子を説明する図。図6(c)は2次と3次の振動モードの振動が異なる周波数で振動した場合に振動間の位相差が90°を中心とする領域と270°を中心とする領域とで振動振幅を変化させるための圧電素子に印加する電圧波形を説明する図。
【図7】図7(a)は本発明の第1の実施形態における振動装置の構成を示すブロック図。図7(b)は振動装置の各部の動作波形を示すタイミングチャート。
【図8】図8(a)は本発明の第1の実施形態における第2の例の振動装置の構成を示すブロック図。図8(b)は第2の例の振動装置の各部の動作波形を示すタイミングチャート。
【図9】図9(a)は振動装置の印加電圧波形の第1の例を示す図。図9(b)は振動装置の印加電圧波形の第2の例を示す図。図9(c)は振動装置の印加電圧波形の第3の例を示す図。
【図10】3次と5次の振動モードの振動が位相差90°の同じ周波数で振動した場合の合成振動波形の時間的変化を説明する図。
【図11】図11(a)は本発明の第1の実施形態における光学フィルタの第2の構成を示す図。図11(b)は光学フィルタの第3の構成を示す図。
【図12】図12(a)は本発明の第2の実施形態における振動装置の構成を示すブロック図。図12(b)は振動装置の各部の動作波形を示すタイミングチャート。
【図13】本発明の第2の実施形態の制御装置27の動作を説明するフローチャート。
【図14】本発明の第2の実施形態における光学フィルタの第2の構成を示す図。
【図15】本発明の第3の実施形態における振動装置の構成を示すブロック図。
【図16】本発明の第3の実施形態の制御手段36の動作を説明するフローチャート。
【図17】本発明の第3の実施形態における振動装置の各部の動作波形を示すタイミングチャート。
【図18】図18(a)は本発明の第4の実施形態における振動装置の構成を示すブロック図。図18(b)は振動装置の各部の動作波形を示すタイミングチャート。
【図19】図19(a)は特許文献1に開示された従来の振動装置の構成を示す図。図19(b)は特許文献2に開示された従来の振動装置の構成を示す図。
【発明を実施するための形態】
【0011】
以下に、本発明の実施形態について説明する。
[第1の実施形態]
図1(a)を用いて、第1の実施形態における画像入力センサの入力面に設けられ光学フィルタ上の塵埃を除去する振動装置の構成例について説明する。
図1(a)において、1は弾性体である光学フィルタ、2と3は光学フィルタ1を加振して光学フィルタ1上に付着する塵埃を除去する為の圧電素子(電気−機械エネルギー変換素子)、4は光学フィルタ1を透過して結像される画像を入力する為の画像入力センサである。
圧電素子2、3は複数の電極区画毎に図示した極性によって交互に分極方向が異なっており、電極の数に応じた次数(振動の腹の数)の面外振動を光学フィルタ1上に励振するようになっている。
圧電素子2に設けられた電極2−1と電極2−2では極性が反転している。圧電素子2の不図示の裏面は全面を覆う一枚の電極となっている。
電極2−1と電極2−2と不図示の裏面電極間に同じ電圧を印加すると分極方向に応じて歪みの増減が逆になるため、同じ交流電圧を印加すると長手方向に2つの腹を有する2次の曲げ振動(2次の振動モードの振動)が発生する。
また、電極2−3は不図示の裏面電極と導通するように構成されており電極2−3をグランド電位に接続することで圧電素子2の不図示の裏面電極をグランド電位に接続している。
【0012】
図1(b)は光学フィルタ1上に形成される定在波の波形である圧電素子2によって形成される2次の振動モードの波形を示している。
また、図1(c)は圧電素子3によって形成される3次の振動モードの波形を示している。
各振動波形は、光学フィルタ1の面外方向の曲げ振動であり、振動振幅が大きいと振動の腹の部分は大きな加速度を有するため腹付近に付着した塵埃は光学フィルタ1の面外方向に飛ばされ除去される。
そこで、2次と3次の振動モードは腹の位置が重ならない事を利用して両方の面外振動を十分大きな振動振幅で発生させれば光学フィルタ1上の全ての領域で塵埃を除去することが可能となる。
ただ、光学フィルタ1上から付着力に打ち勝って塵埃を弾き飛ばすには大きな加速度で振動させる必要があることや、光学フィルタ1の画像通過面に対して垂直方向に弾き飛ばすため一旦弾き飛ばしても再度付着する場合があった。
このようなことから、上記した特許文献1では、光学フィルタ1上を移動する波を発生させ、塵埃を光学フィルタ1の画像通過面上を接線方向に搬送する塵埃除去方法が提案されている。この方法では、上記2次と3次の振動モードの面外振動を同じ周波数で振動させると共に、時間的振動の位相差を90°程度ずらすことで光学フィルタ1上を接線方向に移動する曲げ振動を発生させている。
しかし、2次と3次の振動モードの持つ固有振動数は通常異なるため、同じ力で同じ振動周波数で加振しつつ同程度の振動振幅を得るためには、それぞれを単独にそれぞれの固有振動数で加振する場合と比較して、小さな振動振幅しか得られない。2次と3次の振動モードにおいては、次数が大きいほど高い周波数となる。
【0013】
図2〜図5は、2次の振動モードと3次の振動モードの波形を、同時に同じ周波数で発生させた場合の合成振動波形(2次の振動モードの振動と3次の振動モードの振動とを合成した振動波形)を示す図である。
横軸は光学フィルタ1の長手方向の位置、縦軸は光学フィルタ1上の面外方向の振動振幅を示している。
図2は2次の振動モードと3次の振動モードの振動間の時間的位相差が0°の場合の合成振動波形を示している。
また、図3は位相差90°、図4は位相差180°、図5は位相差270°の場合を、それぞれ示している。
図2〜図5の各図の(a)〜(f)は時間的進行を示している。それぞれ破線が2次の振動モードの振動波形、点線が3次の振動モードの振動波形、実線が2次と3次の振動モードの合成振動波形を示している。
図2(位相差0°)と図4(位相差180°)の合成振動波形の波頭位置の時間的変化を見ると常に同じ位置に在るのに対し、図3(位相差90°)と図5(位相差270°)の合成振動波形の波頭位置は時間的に移動していることがわかる。
このように、2次と3次の振動モードの振動波形が時間的に90°又は270°近傍にあると合成振動波形の波頭位置はそれぞれ逆方向に移動し、0°又は180°近傍にあると合成振動波形の波頭位置は移動しないことがわかる。
【0014】
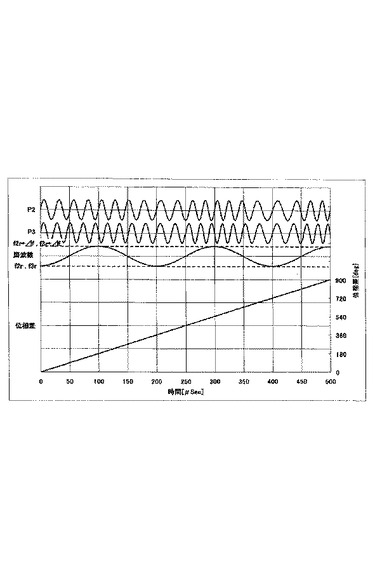
図6(a)は、2次の振動モードと3次の振動モードの振動振幅の時間変化を示す図で、破線の正弦波が2次の振動モードの振動振幅、実線の正弦波が3次の振動モードの振動振幅を示している。
2次の振動モードと3次の振動モードの振動が各固有振動数近傍の周波数で振動しているため、2次の振動モードと3次の振動モードの振動間の時間的位相差が時間と共に変化している。
直線的に変化する実線は両振動モードの振動間の時間的位相差の変化を示しており、2次と3次の振動モードの固有振動数の差に応じた一定の変化率で位相差が変化している。
この様な状態では2次と3次の振動モードによる合成振動波形の波頭の位置は位相差が90°と270°に近づくとそれぞれ反対方向に移動することを繰り返すようになる。
そのため、光学フィルタ1上に付着する塵埃は同じ位置を行ったりきたりするだけで振動によって表面から弾き飛ばされる塵埃の他は光学フィルタ1上から排出されない状態となる。
【0015】
そこで、本実施形態では、2次と3次の振動モードの振動間の時間的位相差が90°の時と270°の時で、合成振動波の振幅に一定の差が生じるよう加振力を変化させる。
このようにすることで、合成振動波の波頭の移動方向によって合成振動波の振動振幅に差が生じ、光学フィルタ1上(弾性体上)を移動する振動波を低電圧の印加により効率良く発生させることができ、光学フィルタ1上の塵埃を一定方向に搬送することが可能となる。
図6(b)は、この時の振動振幅の変化の様子を示したものである。図6(a)と同様に破線の正弦波が2次の振動モードの振動振幅、実線の正弦波が3次の振動モードの振動振幅を示しており、直線的に変化する実線は両振動モードの時間的位相差の変化を示している。
このように、2次と3次の振動モードの振動振幅の時間的変化が、位相差が90°近傍の時に大きく、位相差が270°近傍の時に小さくなるように変化する。そのため、位相差が90°近傍の時の塵埃の移動量の方が位相差が270°近傍の時の移動量より多くなり、最終的には光学フィルタ1上の塵埃は一定方向に移動し光学フィルタ1上から排除される。
図6(c)は、この時に実際に圧電素子2、3へ印加する交流電圧(交流信号)の波形を示す図で、破線の正弦波が圧電素子2への印加電圧波形、実線の正弦波が圧電素子3への印加電圧波形の例を示している。
直線的に変化する実線は両印加電圧間の時間的位相差の変化を示している。印加電圧は一定の期間だけ出力され一定の周期単位で繰り返すように出力されており、両印加電圧間の位相差が0°から90°の間だけ印加電圧が発生している。この周期は2次の振動モードの固有振動数と3次の振動モードの固有振動数間の差の周波数の周期で表すことが出来る。
【0016】
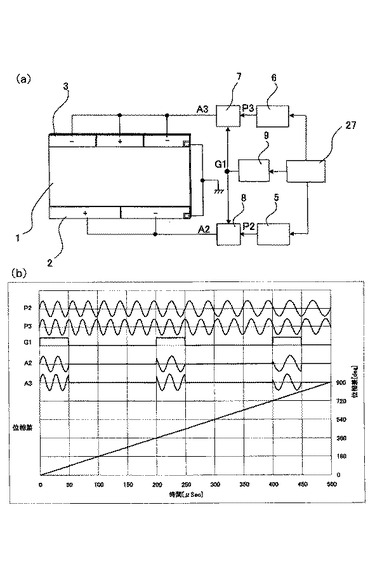
図7(a)は、本実施形態における以上のような印加電圧を発生するための駆動回路の構成を示すブロック図である。
5は2次の振動モードの振動を励振するための固有振動数f2rの交流信号P2を発生する信号発生器(第1の信号発生器)、6は3次の振動モードの振動を励振するための固有振動数f3rの交流信号P3を発生する信号発生器(第2の信号発生器)である。
9は固有振動数f3rと固有振動数f2rの差であるf3r−f2rの周波数のパルスで所定のパルス幅のパルス信号G1を発生するゲート信号発生器である。なお、固有振動数f2r及び固有振動数f3rの値は不図示の振動振幅評価手段によって交流信号P2、P3に対する光学フィルタ1の振動状態を評価することで求めておく。
7、8は乗算器で、信号発生器5及び信号発生器6の信号をゲート信号(制御信号)でON/OFFした信号A2、A3を出力する動作を行っている。
制御手段10は信号発生器5と6及びゲート信号発生器9の動作を、不図示の指令手段からの塵埃除去開始指令に応じて動作を制御している。
つまり、制御手段10は、信号発生器5及び6が発生する交流信号の周波数を設定し、信号発生器5及び6に指令を出す。また、制御手段10は、信号発生器5と6で発生した交流信号P2と交流信号P3の振幅を制御するための制御信号をゲート信号発生器9に出力している。
図7(b)は、本実施形態における各部の動作波形を示すタイミングチャートである。図7(b)では、信号発生器5及び信号発生器6の交流信号P2、P3は、ゲート信号発生器9の出力信号G1により乗算器7、8によってON/OFFされ、出力信号A2、A3が出力される。
出力信号A2と出力信号A3の位相関係は直線的に変化する位相差グラフより、約0°から90°の間だけ信号が発生していることがわかる。
【0017】
図8(a)は、本実施形態における別の駆動回路の構成例を示すブロック図である。11は2次の振動モードの固有振動数f2rのパルス信号P2_1を発生するパルス発生器(信号発生器)、12は3次の振動モードの固有振動数f3rのパルス信号P3_1を発生するパルス発生器(信号発生器)である。
13は固有振動数f3rと固有振動数f2rの差であるf3r−f2rの周波数のパルスで所定のパルス幅のパルス信号G1を発生するゲート信号発生器である。
14、15は論理AND素子で、パルス発生器11及びパルス発生器12の信号をゲート信号(制御信号)G1でON/OFFする動作を行っている。
16、17は論理AND素子の出力パルスを電力増幅するための増幅器である。増幅器16、17は論理AND素子14、15の出力信号であるA2_1、A3_1を電力増幅して圧電素子2、3に印加する交流電圧(交流信号)を出力している。
本構成例においても、制御手段10は、パルス発生器11及び12が発生するパルス信号の周期(つまり2次と3次の振動モードの振動を励振するための交流信号の周波数に対応する)を設定してパルス発生器11及び12に指令を出す。また、制御手段10は、パルスP2_1とパルス信号P2_1の振幅を制御するための制御信号をゲート信号発生器13に出力している。
図8(b)は、各部の動作波形を示すタイミングチャートである。図8(b)では、パルス発生器11及びパルス発生器12及びゲート信号発生器13は、制御手段10によって動作が制御され、出力信号P2_1、P3_1及びゲート信号G1を出力する。
そして、これらの信号を論理AND素子14、15に入力することによって出力信号A2_1、A3_1を出力している。
信号A2_1と信号A3_1の位相関係は直線的に変化する位相差グラフより約0°から120°の間だけ信号が発生していることがわかる。
また、図8(a)の例では圧電素子2及び圧電素子3へ信号A2_1及び信号A3_1を直接電力増幅して印加しているが、インダクタ素子等を介して印加することで印加電圧波形を滑らかにするよう構成しても良い。
【0018】
また、上記例では交流電圧のON/OFFによって光学フィルタ1上を移動する合成振動波の振動振幅を移動方向に応じて増減させていたが、完全にOFFしなくても合成振動波の振動振幅は増減させることが出来る。
図9(a)、図9(b)に、その際の印加電圧波形を示す。図9(a)は印加電圧の振幅を位相差が0°から90°までを大きくしその他の区間では小さくした例である。
図9(b)は印加電圧の振幅を正弦的に変化させた例である。
また、上記例では印加電圧を0°から90°までを大きくしたが、他の位相差でも合成振動波の振動振幅に差を生じさせれば、これに限られるものではない。
例えば、各振動モードの振動間の位相差が0°から180°の間と、180°から360°までの間の合成振動波の振動振幅の平均値に差があれば、合成振動波の移動方向に応じて振幅差が発生するため、特に0°から90°に限定するものではない。つまり、2次の振動モードの交流信号の周波数と3次の振動モードの交流信号の周波数との差に応じた周期で、合成振動波の振動振幅に差を生じることができれば、結果的に送り量に差が生じ、塵埃は一定方向に移動する。
例えば、45°から120°でも、合成振動波の振動振幅に差が発生するならこれでも良いことは当然である。
また、上記例では2次と3次の振動モードの振動振幅(つまり2次と3次の振動モードを励振するための交流信号の振幅)を同様に振幅変化させていたが、2次と3次の振動モードの振動とで異なる振幅変化をさせたり、一方のみの振幅を変化させたりしても良いことは当然である。
図9(c)に、一方の印加電圧(交流信号)の振幅のみを変化させた場合の印加電圧波形を示す。このように一方の電圧振幅のみ変化させた場合でも合成振動波の移動方向によって振幅差が発生するから塵埃は一方方向に搬送される。
また、今まで説明した例では第1の振動モードとして2次の振動モードを、第2の振動モードとして3次の振動モードの振動を発生させたが他の次数でも良い。例えば、第1の振動モードとして3次の振動モードを、第2の振動モードとして5次の振動モードの振動を発生させた場合、光学フィルタ1の長手方向の中心で振動の腹の位置が重なるため、この中心位置では塵埃の搬送が出来ないが、振動が重なるため大きな振幅となり塵埃を弾き飛ばしやすい。また、塵埃は振動の節の位置に集まりやすいためこの中心位置から長手方向の両端方向へ節の位置まで塵埃が移動する。
ここで、3次と5次の振動モードの振動波形間の位相差を90°又は270°に近づけていくと波頭の移動がこの中心位置から長手方向の両端へ向けて移動したり逆に中心に向かって移動するようになる。
そのため、この移動によって塵埃が光学フィルタ1の長手方向の両端まで移動し塵埃を光学フィルタ上から除去することが出来る。この時の振動の様子を図10に示す。
【0019】
図10(a)〜(f)は、時間的進行を示している。
点線が3次、破線が5次の振動モードの振動波形の変化、実線が合成振動波形を示している。
この図より3次形状の合成振動波形が中心部の腹が分かれて5次形状に変化し更に両端部の腹が両端に移動して行き3次形状の合成振動波形に変化して行く様子がわかる。
また、本実施例では圧電素子2及び圧電素子3に複数の電極パターンを設けそれぞれの電極パターンに対応する振動モードの振動波形を発生させた。
しかし、次数が増加すると電極数が増え電極間等加振に有効に利用できない領域が増える等して効率が低下する可能性がある。
【0020】
図11(a)は、このような次数の高い振動を少ない電極数で発生させる場合の光学フィルタの第2の構成を示す図である。
今まで説明した例では圧電素子2、圧電素子3を光学フィルタ1の長手方向に沿って紙面上下に配置し独立した次数の振動モードを発生させたが、本実施例では光学フィルタ1の長手方向の両端に独立した圧電素子18、19を設けている。このような配置で圧電素子を設けた場合、圧電素子18と圧電素子19に同相の加振力を印加すると奇数次の振動モードの加振が出来、逆相の加振力を印加すると偶数次の振動モードの加振が出来る。
圧電素子18及び圧電素子19はそれぞれ2つの電極に分かれており、電極18−1と電極19−1を用いて同相の加振力を発生させることで奇数次の振動モードの振動を発生させることが出来る。
また、電極18−2と電極19−2を用いて逆相の加振力を発生されることで偶数次の振動モードの振動を発生させることが出来る。
電極18−3及び電極19−3は圧電素子18及び圧電素子19のそれぞれの裏面電極と接続されており、グランド電位に接続される。
この構成でN次とN+1次の振動モードの振動を発生させることでそれぞれの振動の腹の位置が重ならない振動モードを発生させることが出来るから上記例と同様に塵埃を搬送することが可能となる。
次数の高い振動モードの振動を利用することは、振動周波数が高周波なので可聴音を避けることが出来る利点がある。
また、3つ以上の振動モードの振動を合成した場合でも振動波の移動方向に応じて振動振幅に差を生じるようにそれぞれの振動モードの振動の加振力を制御することで同様の効果が得られることは当然である。
上記例は紙面横方向に塵埃を搬送していたが、これを90°回転すれば上下方向に搬送することが出来る。
そこで、光学フィルタ1の4辺にそれぞれ圧電素子を設ければ、移動方向を上下左右の選択や斜め方向への搬送も自由に行うことが出来る。
図11(b)は、光学フィルタ1の4辺に圧電素子を設けた光学フィルタの第3の構成を示すものである。
【0021】
また、本実施例では、光学フィルタ1上に付着した塵埃を除去する例を示したが光学フィルタ以外でも加振によって振動する弾性体であれば、上記原理を用いて付着物を除去或いは搬送することが出来ることは当然のことである。
また、レーザープリンタのトナー等の光学部材上の粉体や、インク等の液体を積極的に搬送する用途にこのような振動装置を用いても良い。
【0022】
[第2の実施形態]
第2の実施形態として、第1の実施形態と異なる形態の構成例について説明する。
上記第1の実施形態では圧電素子18及び圧電素子19に2つの電極パターンを設け独立した電極で異なる次数の振動モードの振動を発生させていた。
これに対し、本実施形態では光学フィルタ1の長手方向の両端に1つの加振用電極を持つ独立した圧電素子20、21を設けている。
図12(a)を用いて、本実施例の光学フィルタの構成について説明する。
圧電素子20及び圧電素子21には交流電圧を印加するための電極20−1、電極21−1とグランド電位を接続する電極20−2、電極21−2が設けられている。この圧電素子20及び圧電素子21を用いてN次とN+1次の振動モードの振動を発生させるためには、圧電素子20及び圧電素子21に印加する交流電圧に両方の振動モードの固有振動数の信号を重畳させて印加する必要がある。
【0023】
図12(a)は、本実施形態における回路構成を示すブロック図である。
22は2N次の振動モードの固有振動数f2Nの交流信号P2N、−P2Nを発生する信号発生器、23は2N+1次の振動モードの固有振動数f2N+1の交流信号P2N+1を発生する信号発生器である。
24は固有振動数f2N+1とf2N差である(f2N+1)−(f2N)の周波数fGのパルスで所定のパルス幅のパルス信号GNを発生するゲート信号発生器である。
25は記憶装置で信号発生器22及び信号発生器23へ設定する周波数が記憶されている。
26は後述する電流検出器32の出力から圧電素子20の静電容量を計測する静電容量評価装置、27は制御装置である。
記憶装置25に記憶された周波数情報は温度によって変化する圧電素子20の静電容量C20に応じたテーブル構成になっている。
圧電素子20に接続された静電容量評価装置26で計測した静電容量に応じて記憶装置25から制御装置27が読み出し、信号発生器22及び信号発生器23が出力する信号の周波数を設定している。
28は加算器で交流信号P2Nと交流信号P2N+1を加算する加算器で29は交流信号−P2Nと交流信号P2N+1を加算する加算器である。
30、31は乗算器で加算器28及び加算器29の信号をゲート信号でON/OFFした信号AN1、AN2を出力し圧電素子20及び21に交流電圧を印加している。
32は乗算器30の出力と圧電素子20の間に流れる電流を検出するための電流検出器である。
図12(b)は、本実施形態における各部の動作波形を示すタイミングチャートである。
信号発生器22及び信号発生器23の出力信号P2N、−P2N、P2N+1を加算した信号はゲート信号発生器24の出力信号GNによって乗算器30、31によってON/OFFされ、出力信号AN1、AN2が出力される。
信号AN1と信号AN2とも合成された交流電圧となっている。
【0024】
図13に制御装置27の動作を説明するフローチャートを示す。
不図示の指令手段から塵埃除去の開始を指令されると制御装置27はまず圧電素子20の静電容量C20を計測するよう静電容量評価装置26に指令し、静電容量C20を求める。
次に、記憶装置25に記憶された情報から静電容量C20に対応するN次の固有振動数f2NとN+1次の固有振動数f2N+1を関数G1及びG2を用いて求める。
静電容量C20は圧電素子20及び21の温度によって変化する。
温度によって変化する各振動モードの固有振動数は、静電容量C20に対応させて記憶装置25に記憶されており、そのため温度が変化しても最適な加振周波数を選択することが出来る。
そして、これから固有振動数f2N+1と固有振動数f2Nの差の周波数fGを求め、信号発生器22、23及びゲート信号発生器24に周波数を設定し信号出力を開始する。
次に、不図示の画像入力センサーにより光学フィルター1を通過する画像情報を入力して光学フィルタ1上の塵埃による画像欠陥を検出して塵埃の付着状況を確認し、塵埃除去が完了したかどうかを確認する。
塵埃除去が完了していないならゲート信号発生器24にゲート信号GNのタイミングを所定量ずらすことでゲート信号のON区間の信号発生器22と信号発生器23の出力信号P2NとP2N+1間の位相差範囲を所定位相変化させる。
そして、繰り返し不図示の画像入力センサーによる塵埃付着状況の評価とゲート信号GNのタイミングのシフトを行い塵埃が所定量以下になるか一定時間以上繰り返すかすると塵埃除去動作を終了する。
ここで、ゲート信号GNの位相をシフトしていくのは記憶装置25によって温度による各固有振動数の変化をキャンセルしようとしても完全ではなく、ゲート信号GNと出力信号P2N、出力信号P2N+1との間の最適な位相関係は状況により変化するからである。
【0025】
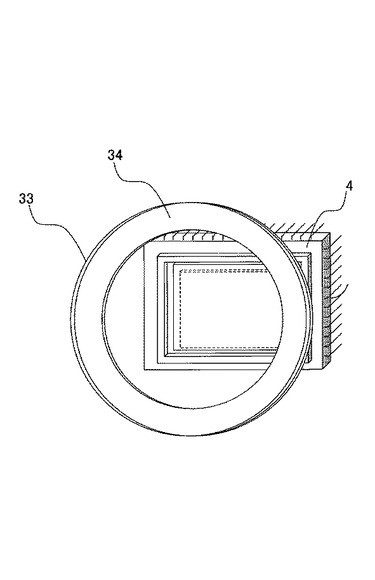
また、本実施形態では光学フィルタ1は長方形であったが円形であっても良い。
図14は、円盤状の光学フィルタの外周部に圧電素子を配置した例を示す図である。33は透明な光学フィルタであり、34は光学フィルタ33の裏面の周上に接着された円環状の圧電素子である。
光学フィルタ33には圧電素子34に印加する交流電圧の周波数に応じて次数の異なる同心円状に複数の波を有する振動モードの振動が発生する。
そこで、次数が1異なる振動モードを使って上記例と同様にして光学フィルタ33上に付着する塵埃を除去することが可能である。
圧電素子34は表裏1枚ずつの電極で構成されており、裏面の電極は光学フィルタ33上に設けられた不図示の透明電極によってグランド電位に接続されている。
このように、交流電圧を印加するための電極を1つしか持たないため同時に異なる次数の振動モードの振動を発生させるには両振動モードを発生させるための異なる周波数の交流信号を重畳した信号を圧電素子34に印加する必要がある。
そのような合成振動波形は本実施形態の駆動回路を用いれば発生することが可能である。
【0026】
[第3の実施形態]
第3の実施形態として、上記各実施形態と異なる形態の構成例について説明する。
以上で説明した第1及び第2の実施形態では、圧電素子に印加する交流電圧の振幅を変化させることで、光学フィルタ上を移動する合成振動波の移動方向に応じて合成振動波の振動振幅を変化させる構成であった。
これに対して、本実施形態では印加する交流電圧の周波数を変化させるように構成される。
図15は本実施形態の構成を示す図である。
2−4は圧電素子2に設けられた振動検出用電極で圧電素子3で加振することで励起される3次の振動モードの振動の腹の位置に設けられており、3次の振動モードの振動状態に応じた振動波形を検出することが出来る。
35は振動検出用電極2−4の出力する交流信号の振幅を検出するための振幅検出手段である。
振幅検出手段35で検出された振幅は後述する制御手段36に入力されており、3次の振動モードの固有振動数を検出する用途に使用されている。
本実施形態では3次の振動モードの振動の腹の位置のみに振動検出用電極を設けたが2次の振動モードの振動の腹の位置あるいは双方の腹の位置に設けても良い。
また、2次の振動モードの腹の位置と3次の振動モードの腹の位置の中間に設けることで双方の振動を1つの振動検出電極で検出するようにしても良い。
このように振動検出用電極2−4を設けることで塵埃除去動作の前に事前に各振動モードの固有振動数を検出し除去動作を開始することが出来る。
制御手段36は信号発生器6及び信号発生器5に出力周波数を指令しており、振幅検出手段35で検出した2次の振動モードの固有振動数f2rと3次の振動モードの固有振動数f3rを基準として設定される。
信号発生器5にはf2r〜f2r+Δfの範囲、信号発生器6にはf3r〜f3r+Δfの範囲で周期的に変化する周波数を逐次指令している。
出力周波数の変化の周波数はf3rとf2rの差の周波数に設定され変化の大きさは双方とも同じに設定される。
【0027】
図16に、制御手段36の動作のフローチャートを示す。
まず、最初に信号発生器6に予め決められた周波数範囲の交流信号を高い周波数から低い周波数へ向け掃引して発生させる。
そして、振動検出用電極2−4から出力される交流電圧の振幅を振幅検出手段35で検出し3次の振動モードの固有振動数f3rを検出する。
次に、3次の振動モードの固有振動数f3rから予め求められている3次の振動モードの固有振動数f3rと2次の振動モードの固有振動数f2rとの差fdを減算し、2次の振動モードの固有振動数f2rを求める。そして、信号発生器5の出力周波数f2、信号発生器6の出力周波数f3を時間をtとして以下の式で表されるように逐次設定する。
【0028】
これにより、信号発生器6及び信号発生器5の出力信号はそれぞれf3r〜f3r+Δfの範囲、f2r〜f2r+Δfの範囲で、周波数fdで周期的に周波数が変化するようになる。
すると、加振周波数がそれぞれの次数の振動モードの固有振動数に近い時に大きく塵埃が移動し、共振より高い周波数になると塵埃の移動量が減り移動方向による移動量の偏りが発生し塵埃が一方の移動方向に搬送されるようになる。
そして、定期的に不図示の画像センサによる塵埃除去状況を判断し、所定の時間あるいは塵埃除去状況に達したら信号発生器6及び信号発生器5の出力信号を停止させるように動作する。
【0029】
図17は、出力信号P2、出力信号P3の間の周波数差を一定に保ちつつ周波数を変化させた場合の波形を示す図である。
出力信号P2の周波数はf2r〜f2r+Δfの間で正弦的に変化しており出力信号P3の周波数はf3r〜f3r+Δfの間で正弦的に変化している。
出力信号P2及び出力信号P3の周波数変化は同期して同じ振幅で変化しており周波数が低く、各振動モードの固有振動数近傍では光学フィルタ1上の振動振幅は大きくなる。
そして、周波数が高くなると固有振動数から離れることで各振動モードの振動振幅が小さくなる。
また、2つの信号発生器の出力する交流信号の周波数差を保ちながら周波数を同時に掃引しているので、各振動モード間の位相差が上記第1及び第2の実施形態と同様に直線的に変化している。
【0030】
[第4の実施形態]
第4の実施形態として、上記第3の実施形態と異なる形態の構成例について説明する。
第3の実施形態では、3次の振動モードの固有振動数f3rを振動検出用電極2−4の出力信号を用いて求めることで信号発生器6及び信号発生器5の出力周波数の範囲を設定していた。
これに対して、本実施形態では、予め周波数特性を検出しない方法について説明する。
本実施形態は各振動モードの固有振動数を検出する代わりに固有振動数f2rと固有振動数f3rとの差fdをあらかじめ求めておき、周波数差をfdに設定した2つの交流電圧信号P2、P3を出力している。
それぞれの次数の固有振動数を含む範囲で周波数を掃引することで必ず加振周波数がそれぞれの次数の固有振動数を通るようにしている。
温度変動や個体差があっても相対的な周波数は変化が少ないことから予め周波数差fdを設定しても周波数掃引時にはほとんど同時にそれぞれの次数の固有振動数を通過する。
【0031】
図18(a)は、本実施形態の構成を示す図である。
制御装置27は信号発振器6及び信号発振器5に周波数差fdを保ちつつ周波数を掃引する設定を行いながら周波数fdのタイミングでゲート信号G1を発生するようにゲート信号発生器9の設定を行う。
信号発生器6及び信号発生器5の出力信号P3及びP2は乗算器7及び乗算器8でゲート信号G1によってON/OFFされ圧電素子3及び圧電素子2に印加される。
図18(b)に各部の動作波形のタイミングチャートを示す。
信号P2及び信号P3の周波数が高い周波数から低い周波数に掃引されながら所定のタイミングでゲート信号G1でON/OFFされ、信号A2及び信号A3が出力されている。
信号A2と信号A3間の位相差はゲート信号G1のタイミングでいつも0°から90°の間となっているのがわかる。
【0032】
以上の各実施形態では、弾性体上を移動する振動波を、低エネルギーで効率良く発生させることができる本発明の振動装置を、光学機器であるカメラに適用した例について説明したが、本発明はこれらに限定されるものではない。
本発明の振動装置は、光学機器として、カメラ、ファクシミリ装置、スキャナ、プロジェクタ、複写機、レーザビームプリンタ、インクジェットプリンタ、レンズ、双眼鏡、画像表示装置などの塵埃除去装置として適用可能である。
さらには、本発明の振動装置は、塵埃を除去する必要がある、光学機器以外の様々な装置にも適用可能である。
【符号の説明】
【0033】
1:光学フィルタ
2、3:圧電素子
4:画像入力センサ
5、6:信号発生器
7、8:乗算器
9:ゲート信号発生器
10:制御手段
【特許請求の範囲】
【請求項1】
第1の振動モードの振動と、前記第1の振動モードとは次数の異なる第2の振動モードの振動と、を弾性体上に励振し、前記弾性体上に前記第1の振動モードの振動と前記第2の振動モードの振動とを合成した合成振動波を形成する振動装置の駆動回路であって、
前記第1の振動モードの振動を励振するための第1の交流信号を発生する第1の信号発生器と、前記第2の振動モードの振動を励振するための第2の交流信号を発生する第2の信号発生器と、
前記第1の交流信号と前記第2の交流信号の周波数が異なる周波数となるよう前記信号発生器の発生する周波数を設定し、
前記合成振動波の移動方向に応じて前記合成振動波の振動振幅に差を生じさせるよう前記第1の交流信号と前記第2の交流信号のうち少なくとも一方を制御する制御手段と、
を有することを特徴とする駆動回路。
【請求項2】
前記制御手段は、前記第1の振動モードの振動と第2の振動モードの振動との振動間の時間的位相差が、0°から180°の間と、180°から360°の間で、前記合成振動波の振動振幅に差を生じさせる制御信号を出力することを特徴とする請求項1に記載の駆動回路。
【請求項3】
前記制御手段は、前記第1の交流信号の周波数と前記第2の交流信号の周波数との差に応じた周期単位で、前記合成振動波の振動振幅に差を生じさせるよう前記第1の交流信号と前記第2の交流信号のうち少なくとも一方を制御することを特徴とする請求項1または請求項2に記載の駆動回路。
【請求項4】
前記制御手段は、前記合成振動波の移動方向に応じて前記合成振動波の振動振幅に差を生じさせるよう前記第1の交流信号と前記第2の交流信号のうち少なくとも一方の振幅を変化させることを特徴とする請求項1から3のいずれか1項に記載の駆動回路。
【請求項5】
前記制御手段は、前記合成振動波の移動方向に応じて前記合成振動波の振動振幅に差を生じさせるよう前記信号発生器の発生する前記第1の交流信号と前記第2の交流信号の周波数を変化させることを特徴とする請求項1から3のいずれか1項に記載の駆動回路。
【請求項6】
前記制御手段は、前記第1の交流信号を前記第1の振動モードの固有振動数近傍の周波数に設定し、前記第2の交流信号を前記第1の振動モードの固有振動数近傍の周波数に設定することを特徴とする請求項1から5のいずれか1項に記載の駆動回路。
【請求項7】
前記振動装置は、前記合成振動波によって光学機器の光学部材上の塵埃を除去する振動装置であることを特徴とする請求項1から6のいずれか1項に記載の駆動回路。
【請求項8】
第1の振動モードの振動と、前記第1の振動モードとは次数の異なる第2の振動モードの振動と、を弾性体上に励振し、前記弾性体上に前記第1の振動モードの振動と前記第2の振動モードの振動とを合成した合成振動波を形成する振動装置の駆動方法であって、
前記第1の振動モードの振動を励振するための第1の交流信号と、前記第2の振動モードの振動を励振するための前記第1の交流信号と異なる周波数の第2の交流信号と、を発生するステップと、
前記合成振動波の移動方向に応じて前記合成振動波の振動振幅に差を生じさせるよう前記第1の交流信号と前記第2の交流信号のうち少なくとも一方を制御するステップと、
を有することを特徴とする駆動方法。
【請求項9】
前記第1の交流信号と前記第2の交流信号のうち少なくとも一方を制御するステップにおいて、
前記第1の交流信号の周波数と前記第2の交流信号の周波数との差に応じた周期単位で、前記合成振動波の振動振幅に差を生じさせるよう前記第1の交流信号と前記第2の交流信号のうち少なくとも一方を制御することを特徴とする請求項8に記載の駆動方法。
【請求項10】
前記第1の交流信号と前記第2の交流信号のうち少なくとも一方を制御するステップにおいて、前記第1の交流信号と前記第2の交流信号のうち少なくとも一方の振幅を変化させることを特徴とする請求項8または請求項9に記載の駆動方法。
【請求項11】
前記第1の交流信号と前記第2の交流信号のうち少なくとも一方を制御するステップにおいて、前記第1の交流信号と前記第2の交流信号の周波数を変化させることを特徴とする請求項8または請求項9に記載の駆動方法。
【請求項12】
前記第1の振動モードの固有振動数と前記第2の振動モードの固有振動数を検出するステップを有し、
検出した前記第1の振動モードの固有振動数近傍の周波数を前記第1の交流信号の周波数として設定し、検出した前記第1の振動モードの固有振動数近傍の周波数を前記第1の交流信号の周波数として設定することを特徴とする請求項8から11のいずれか1項に記載の駆動方法。
【請求項1】
第1の振動モードの振動と、前記第1の振動モードとは次数の異なる第2の振動モードの振動と、を弾性体上に励振し、前記弾性体上に前記第1の振動モードの振動と前記第2の振動モードの振動とを合成した合成振動波を形成する振動装置の駆動回路であって、
前記第1の振動モードの振動を励振するための第1の交流信号を発生する第1の信号発生器と、前記第2の振動モードの振動を励振するための第2の交流信号を発生する第2の信号発生器と、
前記第1の交流信号と前記第2の交流信号の周波数が異なる周波数となるよう前記信号発生器の発生する周波数を設定し、
前記合成振動波の移動方向に応じて前記合成振動波の振動振幅に差を生じさせるよう前記第1の交流信号と前記第2の交流信号のうち少なくとも一方を制御する制御手段と、
を有することを特徴とする駆動回路。
【請求項2】
前記制御手段は、前記第1の振動モードの振動と第2の振動モードの振動との振動間の時間的位相差が、0°から180°の間と、180°から360°の間で、前記合成振動波の振動振幅に差を生じさせる制御信号を出力することを特徴とする請求項1に記載の駆動回路。
【請求項3】
前記制御手段は、前記第1の交流信号の周波数と前記第2の交流信号の周波数との差に応じた周期単位で、前記合成振動波の振動振幅に差を生じさせるよう前記第1の交流信号と前記第2の交流信号のうち少なくとも一方を制御することを特徴とする請求項1または請求項2に記載の駆動回路。
【請求項4】
前記制御手段は、前記合成振動波の移動方向に応じて前記合成振動波の振動振幅に差を生じさせるよう前記第1の交流信号と前記第2の交流信号のうち少なくとも一方の振幅を変化させることを特徴とする請求項1から3のいずれか1項に記載の駆動回路。
【請求項5】
前記制御手段は、前記合成振動波の移動方向に応じて前記合成振動波の振動振幅に差を生じさせるよう前記信号発生器の発生する前記第1の交流信号と前記第2の交流信号の周波数を変化させることを特徴とする請求項1から3のいずれか1項に記載の駆動回路。
【請求項6】
前記制御手段は、前記第1の交流信号を前記第1の振動モードの固有振動数近傍の周波数に設定し、前記第2の交流信号を前記第1の振動モードの固有振動数近傍の周波数に設定することを特徴とする請求項1から5のいずれか1項に記載の駆動回路。
【請求項7】
前記振動装置は、前記合成振動波によって光学機器の光学部材上の塵埃を除去する振動装置であることを特徴とする請求項1から6のいずれか1項に記載の駆動回路。
【請求項8】
第1の振動モードの振動と、前記第1の振動モードとは次数の異なる第2の振動モードの振動と、を弾性体上に励振し、前記弾性体上に前記第1の振動モードの振動と前記第2の振動モードの振動とを合成した合成振動波を形成する振動装置の駆動方法であって、
前記第1の振動モードの振動を励振するための第1の交流信号と、前記第2の振動モードの振動を励振するための前記第1の交流信号と異なる周波数の第2の交流信号と、を発生するステップと、
前記合成振動波の移動方向に応じて前記合成振動波の振動振幅に差を生じさせるよう前記第1の交流信号と前記第2の交流信号のうち少なくとも一方を制御するステップと、
を有することを特徴とする駆動方法。
【請求項9】
前記第1の交流信号と前記第2の交流信号のうち少なくとも一方を制御するステップにおいて、
前記第1の交流信号の周波数と前記第2の交流信号の周波数との差に応じた周期単位で、前記合成振動波の振動振幅に差を生じさせるよう前記第1の交流信号と前記第2の交流信号のうち少なくとも一方を制御することを特徴とする請求項8に記載の駆動方法。
【請求項10】
前記第1の交流信号と前記第2の交流信号のうち少なくとも一方を制御するステップにおいて、前記第1の交流信号と前記第2の交流信号のうち少なくとも一方の振幅を変化させることを特徴とする請求項8または請求項9に記載の駆動方法。
【請求項11】
前記第1の交流信号と前記第2の交流信号のうち少なくとも一方を制御するステップにおいて、前記第1の交流信号と前記第2の交流信号の周波数を変化させることを特徴とする請求項8または請求項9に記載の駆動方法。
【請求項12】
前記第1の振動モードの固有振動数と前記第2の振動モードの固有振動数を検出するステップを有し、
検出した前記第1の振動モードの固有振動数近傍の周波数を前記第1の交流信号の周波数として設定し、検出した前記第1の振動モードの固有振動数近傍の周波数を前記第1の交流信号の周波数として設定することを特徴とする請求項8から11のいずれか1項に記載の駆動方法。
【図1】

【図2】

【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】

【図10】
【図11】
【図12】
【図13】

【図14】
【図15】

【図16】

【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2011−125815(P2011−125815A)
【公開日】平成23年6月30日(2011.6.30)
【国際特許分類】
【出願番号】特願2009−288284(P2009−288284)
【出願日】平成21年12月18日(2009.12.18)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成23年6月30日(2011.6.30)
【国際特許分類】
【出願日】平成21年12月18日(2009.12.18)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]