
Fターム[5H680BC00]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 用途 (1,055)
Fターム[5H680BC00]の下位に属するFターム
カメラ (607)
時計 (68)
ファン (4)
プリンタ (65)
複写機 (31)
自動ドア、パワーウィンドウ (5)
ロボット (71)
工作機械 (42)
微動載置台、微動ステージ (143)
Fターム[5H680BC00]に分類される特許
1 - 19 / 19
注入機器及び超音波モータの制御方法
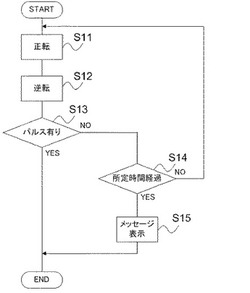
【課題】超音波モータのステータとロータの固着を効率的に解除することができる注入機器を提供する。
【解決手段】 本発明の注入機器は、薬液を注入するための注入機器1であって、超音波モータ31を有する超音波モータ部3と、超音波モータ31が正転するときに薬液を送り出すように、超音波モータ部3によって駆動される駆動機構4と、超音波モータ部3の超音波モータ31を制御する制御装置5とを備え、超音波モータ31は、ステータ32及びロータ33を有し、制御装置5は、ステータ32とロータ33の固着を解除するために、超音波モータ31が正転と逆転を交互に繰り返すように制御する。
(もっと読む)
圧電ポンプの駆動回路及びこれを内蔵した駆動回路内蔵圧電ポンプ

【課題】駆動電圧の電圧軸成分の分割数を増やすことなく、騒音の影響を低減することができる圧電ポンプの駆動回路を提供すること。
【解決手段】デジタル信号生成部520は、電圧軸成分が等間隔で分割された駆動制御用信号を正弦波デジタル信号としたときに、正弦波デジタル信号の電圧軸成分を、正弦波デジタル信号から導かれる参照信号波形の接線勾配の絶対値が相対的に大きい第1の領域と、上記参照信号波形の接線勾配の絶対値が相対的に小さい第2の領域との少なくとも2つの領域に分け、上記電圧軸成分の第1の領域を、上記正弦波デジタル信号の分割間隔よりも大きい間隔で等間隔に分割し、上記電圧軸成分の第2の領域を、上記正弦波デジタル信号の分割間隔よりも小さい間隔で等間隔に分割した、重み付け分割信号を生成する。
(もっと読む)
駆動回路及び圧電ポンプ
【課題】正弦波デジタル信号のゼロオフセットポイント近辺に発生するスパイクノイズを抑制して、ポンプ駆動時における騒音を低減することができる圧電ポンプの駆動回路を提供すること。
【解決手段】圧電ポンプの駆動回路53は、時間軸と電圧軸に沿って分割されたミクロ矩形波の集合体であって、互いに位相が反対の正弦波デジタル信号SF、SRを生成するデジタル信号生成部520と、正弦波デジタル信号SF、SRを、時間軸(0V軸)上から電圧軸に関して同量だけシフトしたオフセット信号SF´、SR´を生成するオフセット付加部530と、オフセット信号SF´、SR´を用いて高電圧駆動信号a´を生成し、この高電圧駆動信号a´を圧電振動子に与える高電圧制御部540とを有する。
(もっと読む)
共振超音波ピエゾインジェクタを制御する装置及び方法
本発明は、共振超音波圧電素子駆動段(1)を制御する装置に関するものであり、前記装置は:DC電圧(VBATT)を中間DC電圧(Vinter)に昇圧する第1段(2)と、第2変換段(3)を備え、前記第2段は、前記中間DC電圧に接続されるインダクタ(Lp)と、第1スイッチングトランジスタ(M)を含み、前記第1スイッチングトランジスタは、前記インダクタを充電するフェーズ、及び前記インダクタに蓄積されるエネルギーを第1指令パルス列(V1)に応答して転移するフェーズを選択的に制御することにより、前記圧電素子駆動段の励磁電圧(VE)を生成し、前記第2段は、前記第1トランジスタのドレインと前記インダクタの一方の端子との間に直列接続される第2スイッチングトランジスタ(M’)を含み、前記第2スイッチングトランジスタは、前記充電フェーズ中に前記インダクタに蓄積されるエネルギーを第2指令パルス列(V2)に応答して制限することにより、前記励磁電圧の振幅を減少させるために適することを特徴とする。 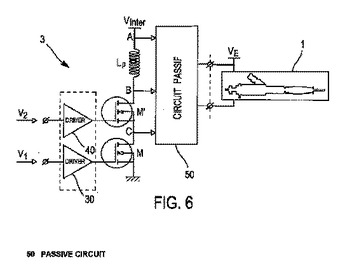 (もっと読む)
(もっと読む)
圧電素子の駆動装置、電子機器、および、圧電素子駆動周波数の制御方法
【課題】回路規模が小さくても実用的に十分な精度で圧電素子に対し共振周波数での駆動を行う。
【解決手段】トランス2と、トランス2の1次側に入力される制御信号CSに追従して周波数が変化する駆動信号DSをトランス2の2次側で発生させ、圧電素子PZに印加する駆動回路3と、コントローラ5とを有する。コントローラ5は、制御信号CSの周波数を所定の周波数範囲FR内で複数回変化させて、当該周波数を変化させるごとに圧電素子PZのインピーダンス変化に応じた検出電位Vdetを検出し、検出電位Vdetの推移に基づいて圧電素子PZの共振周波数frを求める。
(もっと読む)
超音波モータ駆動式の車両用指針計器
【課題】指針軸方向の高さやそれと直交する方向の寸法を小さくして、コンパクト化を図れるようにする。
【解決手段】ハウジング20に超音波モータのステータ部分である振動体10を固定し、この振動体に共振振動を起こさせ、その共振振動をロータ15に伝達することで該ロータ15を回転させ、それにより該ロータ15の先端側に連結された指針4を回す超音波モータ駆動式の車両用指針計器において、振動体10が、環状の本体11と、該環状の本体11の内周側にバネ部12を介して突設された複数の振動子13と、該各振動子13に設けられたピエゾ素子14とから構成され、振動体10の内部にロータ15の基端側が挿入され、ロータ15の外周に振動子13が接触している。
(もっと読む)
超音波モータ及び指針式表示装置
【課題】超音波モータを組み込む機器の小型化や薄型化を阻害することなく、回動制御の精度の向上に貢献する。
【解決手段】回動対象物が装着され且つ当該回動対象物とともに回動する回動体21と、電圧の印加によって前記回動体21を回動させる超音波振動を発生する圧電振動子22と、を有する超音波モータ20において、前記回動体21の回動角に応じた回動角情報を発生するために、前記回動体21とともに回動するように前記回動体21に設けられた回動角情報発生手段23と、前記回動角情報発生手段23と協働して検出した前記回動角情報を出力する回動角情報出力手段24と、を有し、前記回動体21と前記圧電振動子22と前記回動角情報発生手段23と前記回動角情報出力手段24とが一体に形成されたことを特徴とする。
(もっと読む)
摩擦駆動アクチュエータおよびそれを用いるハードディスク装置
【課題】HDDの磁気記録ヘッドの駆動などのために用いられる超音波モータにおいて、応答性を向上する。
【解決手段】面内振動を行い、ステータとなる振動体2をロータ13に内包することで、前記振動体2の振動が摩擦接触するロータ13に伝達されて該ロータ13が予め規定された範囲の回転角度内で往復動する超音波モータ10において、略円筒状や有底円筒状に形成される前記ロータ13の周壁を挟んで、振動体2の当接部2g;2h,2iの反対側の位置に重量部11,12を設ける。したがって、ロータ13の軸受けを不要にした構成にできるとともに、前記重量部21,22では、当接部2g;2h,2iで叩かれても、慣性質量が大きいために逃げず、振動体2に励起された楕円振動による推力を効率良く伝達することができ、ロータ13の慣性質量を従来より軽量化しつつ、応答性を向上できる。
(もっと読む)
駆動装置
【課題】可動部材の位置によらず、可動部材の適切な制御を行える駆動装置を提供する。
【解決手段】印加される電圧に応じて伸縮する電気機械変換素子6と、電気機械変換素子6の伸縮によって往復移動する駆動摩擦部材7と、駆動摩擦部材7に摩擦係合し、駆動摩擦部材7の移動速度に応じて、駆動摩擦部材7上で滑動する可動部材8と、入力信号TESに基づき、可動部材8を移動させるべき速度を算出して、可動部材を移動させるべき速度に応じた速度信号SSを出力するコントローラ10と、速度信号SSに応じて、波形の異なる駆動信号を電気機械変換素子6に印加するドライバ11とを有する駆動装置1において、可動部材8の駆動摩擦部材7上の位置を検出する位置センサ9を設け、位置センサ9の出力に応じて予め定められたレベルの補正信号ASを出力してコントローラ10の速度算出利得を補正する。
(もっと読む)
モータ駆動制御装置及び方法
【課題】 簡単な処理により、理想的な速度カーブとなるようにモータ駆動制御を行うようにする。
【解決手段】 目標回転角度を設定して超音波モータ59の駆動を制御する際に、加速に関するパラメータの設定を行って、超音波モータ59を駆動開始し、加速に関するパラメータに従った加速駆動が終了した後、加速に関するパラメータに基づいて、減速に関するパラメータ、例えば減速開始位置や減速時間を決定する。
(もっと読む)
モータ駆動方法
【課題】 雲台カメラで超音波モータを使用する際、目標とする回転角度に応じて、定速部分がない形で、目標速度を計算すると、オーバシュートや急停止してしまい、駆動音発生の原因となる。
【解決手段】 回転速度を可変でき、目標角度を回転することが可能な、モータの駆動方法において、前記目標角度を入手し、加速時、定速時、及び・または減速時の回転角度を一定割合として、定速時の速度である、目標速度を求め、目標角度をst、加速時の加速度をx1、定数Kxとしたとき、目標速度v1=√(st*x1*Kx)で、目標速度v1を求めることを特徴とするモータ駆動方法。
(もっと読む)
マイクロアクチュエータ、それを用いたヘッドジンバルアッセンブリ、ハードディスクドライブ、その製造方法
【課題】 強度の向上、駆動範囲の拡大化、製造工程の簡略化、製造コストの削減を図ることができるマイクロアクチュエータを提供すること。
【解決手段】 位置決め対象物を搭載するステージ4と、このステージ4が一体的に固定装着されるフレーム2と、このフレーム2に装備され印加される駆動信号に基づいて伸縮変形する圧電部材3と、この圧電部材に駆動信号を印加する駆動装置と、を備え、圧電素子3を、伸縮することによりフレーム2に回転力を付勢するよう配置した。
(もっと読む)
駆動装置及びその駆動方法
【課題】
小型かつ軽量で、安定した変位及び位置決め,あるいは、回転方向の自在な制御が可能な駆動装置及びその駆動方法を提供する。
【解決手段】
駆動装置10は、鏡筒34に支持されたレンズ36の光軸方向に沿って配置され、一端が通路30の底面32に固定されている。前記鏡筒34の外周面には、略円筒状のガイド38が設けられている。該ガイド38には、適宜間隔で光軸方向に沿って複数のスリット40が形成されている。前記駆動装置10は、振動板12の両主面に、圧電素子16,22を設けたバイモルフ構造となっており、前記振動板12の露出部12Aの主面には、振動の節に相当する位置に、突起部14が設けられている。該突起部14を前記スリット40から鏡筒34に当接させ、圧電素子16,22の駆動電極に、時間的に非対称な駆動信号を入力すると、非対称駆動する突起部14によって、鏡筒34が一定方向に安定して変位する。
(もっと読む)
駆動装置、撮像装置及び携帯電話
【課題】圧電素子の後端部のダミー層を利用することにより、圧電素子の後端面が前端面よりも変位することを防止でき、製造面で優れた駆動装置を提供し、その駆動装置を搭載した撮像装置及び携帯電話を提供すること。
【解決手段】圧電素子14の伸縮方向の一端に駆動棒18を取り付け、その駆動棒18に被駆動部材20を摩擦係合して構成され、圧電素子14の重心Gが伸縮方向において伸縮部の幾何中心位置Cより他端側に位置している。これにより、圧電素子14の伸縮の際にその一端側を他端側より大きく変位させることができ、被駆動部材20を効率よく移動させることができる。
(もっと読む)
調律装置
【課題】 従来の機械式メータにおいて生じた不具合が排除された調律装置を提供すること。
【解決手段】 本発明の調律装置では、ピッチ抽出手段により入力信号のピッチが抽出されると、その入力信号のピッチと基準ピッチとの偏差が偏差検出手段によって検出されると、偏差検出手段により検出された偏差に応じた超音波モータの駆動の制御が制御手段によって行われる。即ち、指針は超音波モータによって駆動されるので、例えば、経時的劣化による表示誤差の発生や、設置向き及び設置角度の制限や、使用場所の制限や、装置全体の小型化及び薄型化の限界など、従来の機械式メータにおける不具合であった種々の点が改善される。
(もっと読む)
超音波浮上装置
【課題】許容負荷荷重を大きくすることが可能な超音波浮上装置を提供する。
【解決手段】固定部1と、上記固定部1に対して移動可能に設置された可動部9と、上記固定部1又は可動部9に設けられ超音波振動を発生する振動発生装置13と、を具備し、上記振動発生装置13が超音波振動することにより上記可動部9が浮上面を介して浮上するように構成された超音波浮上装置において、上記振動発生装置13によって発生される超音波振動が主振動に対して副次振動を伴うものであることを特徴とする。
(もっと読む)
超音波モータおよびヘリコプター
【課題】 2本のロータシャフトを同時に駆動する、より小型の超音波モータおよびこれを備えるヘリコプターを実現する。
【解決手段】 異なる2つの振動モードを同時に発生させて2つの出力端Aにそれぞれ略楕円振動を生じさせる1個または2個の超音波振動子3A,3Bと、該超音波振動子3A,3Bに対して相対移動可能な2つのホルダ7A,7Bに1本ずつ回転自在に支持された2本のロータシャフト2A,2Bと、2つのホルダ7A,7Bを相反する方向に同時に付勢して、2本のロータシャフト2A,2Bの外周面に、超音波振動子3A,3Bの2つの出力端Aをそれぞれ密着させる付勢手段4とを備える超音波モータ1を提供する。
(もっと読む)
液体移送装置
【課題】 圧電アクチュエータの圧電層及び振動板を効率よく変形させることが可能なインクジェットヘッドを提供すること。
【解決手段】 圧電アクチュエータ3は、複数の圧力室14に夫々対応する複数の個別電極32、及び、これら複数の個別電極32に対向する振動板30と、複数の個別電極32と振動板30との間に挟まれて、複数の圧力室14に跨って連続的に形成された圧電層31とを有し、圧力室14が形成され且つ個別電極32と重ならない領域に、この領域における圧電アクチュエータ3の剛性を低下させる絶縁材料層34(剛性低下部)が設けられている
(もっと読む)
少なくとも1つの圧電アクチュエータを備えた回路
制御回路(3)が駆動指令(S*)を与えた場合、駆動回路(1)は、圧電アクチュエータ(Pi)に対して駆動信号(S)を出力し、この駆動信号(S)により、圧電アクチュエータ(Pi)が、0位置から駆動位置に移行し、制御回路(3)が補正指令(I1*、I2*)をプリセットした場合、補正回路(2)は、圧電アクチュエータ(Pi)に対して補正信号(I1、I2)を出力し、圧電アクチュエータ(Pi)が、0位置から補正位置に移行し、駆動指令(S*)のプリセットと、補正指令(I1*、I2*)のプリセットとが、互いに関してロックしあう(verriegelt)ように、制御回路(3)が構成されている。  (もっと読む)
(もっと読む)
1 - 19 / 19
[ Back to top ]