
国際特許分類[G03B17/00]の内容
物理学 (1,541,580) | 写真;映画;光波以外の波を使用する類似技術;電子写真;ホログラフイ (245,998) | 写真を撮影するためのまたは写真を投影もしくは直視するための装置または配置;光波以外の波を用いる類似技術を用いる装置または配置;そのための付属品 (67,505) | カメラまたはカメラ本体の細部;その付属品 (15,500)
国際特許分類[G03B17/00]の下位に属する分類
本体 (7,554)
カメラ部材の状態または明るさの適正を表示する信号 (3,249)
フイルムを切り離す装置をもつもの (1)
フイルム上に個々に印を付けるための装置をもつもの,例.タイトル,露出時間 (114)
感光材料を保持し,カメラ内に挿入するのに使われる支持器 (10)
カメラ内での感光材料の位置づけ (25)
露出数の計数 (7)
シャッターから分離したレリーズ装置 (522)
シャッター作動とフイルム送りまたは感光板またはカットフイルムの交換との間の連動
焦点板と感光材料を置換えるための装置
動画用カメラにおける一駒撮影のための装置
他の写真的または光学的装置と組み合わせて使用するもの (745)
加熱または冷却装置をそなえるもの,例.航空機用 (110)
付属装置 (2,147)
国際特許分類[G03B17/00]に分類される特許
1 - 10 / 1,016
撮像装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
電子機器のガスケットの取り付け構造
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
電子カメラおよび電子カメラの制御方法
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
撮像装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
視差画像取得装置、携帯情報端末及び視差画像取得方法
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
撮像機器
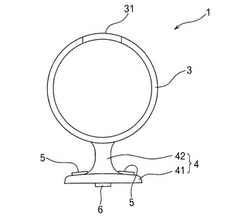
【課題】他の機器と接続して使用することが可能な撮像機器であって、他の機器との関係によって複数の使用形態をとることが出来ると共に、使用形態に応じて動作モードを自動的に切り換えることが出来る撮像機器を提供する。
【解決手段】本発明に係る撮像機器1は、撮像機能を有する本体部3、前記本体部3から突出する支柱部42、前記支柱部42の先端部に設けられたベース部41、前記ベース部41の表面に設けられた第1センサー5、前記ベース部41の裏面に設けられた第2センサー6、及び撮像機器の状態に応じて動作モードを切り換える制御部を具え、該制御部は、第1センサー5が物体の当接を検知したことに応答して供給される第1検知信号、及び第2センサー6が物体の当接を検知したことに応答して供給される第2検知信号の供給状態に応じて動作モードを切り換える。
(もっと読む)
撮像装置、撮像装置の制御方法、プログラム

【課題】単体では2次元画像の撮影を行う撮像装置を複数台利用し、3次元画像の撮影を簡単に行えるようにする。
【解決手段】撮像装置は3次元画像を撮像するための撮像パラメータの情報を他の撮像装置と共有する手段を有し、前記他の撮像装置と無線接続している際に、ユーザから撮像指示があった場合には、前記他の撮像装置と共有した前記撮像パラメータを用いて、前記他の撮像装置と共に3次元画像を生成するための撮像を行い、前記他の撮像装置と無線接続していない際に、ユーザから撮像指示があった場合には、2次元画像を生成するための撮像を行う。
(もっと読む)
情報処理装置、情報処理装置の制御方法、およびプログラム
【課題】センサ校正に関する知識やノウハウのない作業者であっても、センサ校正用入力データを容易に取得し、精度よく校正を行うための校正用入力データであるか否かを容易に判断できるようにする。
【解決手段】撮像装置に対する位置姿勢センサの位置または姿勢を校正するための校正用入力データを処理する情報処理装置であって、撮像装置により撮像された画像を取得する画像取得部と、画像から指標情報を検出する指標検出部と、位置姿勢センサにより計測された位置姿勢センサ自身の位置または姿勢の計測値を取得する計測値取得部と、指標情報と計測値とを含む校正用入力データの推奨レベルを、指標情報と計測値とに基づいて算出する算出部と、推奨レベルを提示する提示部と、を備える。
(もっと読む)
表示装置、電子カメラ、表示システム及びカメラシステム
【課題】 本発明は、例えばユーザの見る姿勢に応じて立体視が容易となる手段を提供する。
【解決手段】 表示装置は、表示部と、読込部と、立体画像生成部と、姿勢情報取得部と、表示制御部とを備える。表示部は、画像を表示する。読込部は、第1姿勢での立体視用の第1立体画像を生成するための第1姿勢情報と第2姿勢での立体視用の第2立体画像を生成するための第2姿勢情報とが関連付けて記録されている、第1立体画像及び第2立体画像の元になる複数の画像を読み込む。立体画像生成部は、第1姿勢情報と第2姿勢情報とに基づいて、第1立体画像と第2立体画像とを複数の画像から各々生成する。姿勢情報取得部は、現在の姿勢を示す姿勢情報を取得する。表示制御部は、姿勢情報に基づいて第1姿勢と第2姿勢との何れかを判別し、判別結果に応じて、第1立体画像と第2立体画像との何れかを表示部に切り替え自在に表示させる。
(もっと読む)
自動追尾カメラシステム
【課題】 追尾被写体の位置が追尾の所定位置と異なっていても大きな映像変化をさせないで所定の位置に追尾制御することを可能にした自動追尾カメラシステムを提供する。
【解決手段】 自動追尾カメラシステムは、レンズ装置と撮像装置を含む撮影部をパン・チルト回動させる回動手段と、撮影映像から追尾対象を検出する追尾対象検出手段と、追尾対象の移動ベクトルを検出する移動ベクトル検出手段と、撮影映像内での追尾対象の捕捉位置を設定する捕捉位置設定手段と、回動手段の駆動を制御する制御手段を有し、制御手段は、追尾対象検出手段によって撮影映像内に追尾対象を検出した後、移動ベクトル検出手段によって検出された移動ベクトルに基づき、捕捉位置に追尾対象を捕捉するよう回動手段を制御する捕捉モードと、捕捉モードの後、追尾対象を捕捉位置に捕捉し続けるように回動手段を制御する維持モードと、を有する。
(もっと読む)
1 - 10 / 1,016
[ Back to top ]