
Fターム[5J070AD07]の内容
レーダ方式及びその細部 (42,132) | アンテナ及び偏波 (3,612) | 送受アンテナのいずれかが複数 (1,035) | 受信アンテナのみが複数 (476) | モノパルスアンテナ (180)
Fターム[5J070AD07]に分類される特許
101 - 120 / 180
レーダ装置
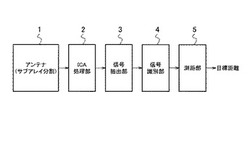
【課題】不要波環境下であっても、処理規模または回路規模を極力大きくせずに、目標の距離および方位を観測できるレーダ装置を提供する。
【解決手段】円開口が形成されるように一方向に配置し、且つ該一方向に直交する方向に開口分割した位相中心の異なる複数のサブアレイを含む1次元DBF(Digital Beam Forming)アレイアンテナ1と、1次元DBFアレイアンテナの複数のサブアレイから送られてくるモノパルス合成前のサブアレイ信号に対して複素ICA(Independent Component Analysis;独立成分分析)を行うことにより、目標信号と不要波信号とを分離するICA処理部2と、ICA処理部により分離された目標信号に基づき距離を計測する測距部5を備える。
(もっと読む)
二次監視レーダ装置及び制御方法

【課題】モノパルス測角処理において、ガーブル発生時に、測角誤差を小さくして、複数の目標の検出精度を向上し得る二次監視レーダ装置を提供する。
【解決手段】ガーブル検出部16において、波形生成部13で得られる和信号Σ及び差信号Δそれぞれの振幅の変化を利用して、オフポアサイト角計算部17によるオフポアサイト角演算処理に先立ち、複数のターゲットからの応答が重なるガーブル期間を検出し、計算制御部171にて当該検出結果に基づいてガーブル期間を除いた和信号Σ及び差信号Δを抽出して、オフポアサイト角計算部17にて和信号Σ及び差信号Δからガーブル期間以外のオフポアサイト角を求めるようにしている。
(もっと読む)
目標角度測定装置
【課題】パルスレーダ装置において受信された反射波に積分処理を行なって検出した目標に対して測角処理を行なう際に、より確度の高い測角結果を取得する目標角度測定装置を得る。
【解決手段】受信されたレーダパルスの反射波をCPIの期間積分処理を行なって検出した目標に対して測角処理を行なう際に、CPIの期間中における目標の測角ビーム内での角度変化の傾向を反映させてあらかじめテーブル値を設定した複数の測角テーブルを用意し、検出した目標のCPIの期間中における測角ビーム内での角度変化の傾向を予測するとともに、その結果に基づき複数の測角テーブルの中から適切な測角テーブルを選択しこれを適用して測角値を算出する。
(もっと読む)
レーダ装置
【課題】レーダの方位の零点較正を容易にする。 【解決手段】送信移相器22−kにより副搬送波の位相が制御される。この副搬送波は、第2変調器23−kで変調され、第1変調器24−kで、変調される。送信信号は、方向性結合器40−kにより受信装置に漏れる。この漏れ送信信号の位相が第1受信移相器35−kにより制御される。レーダ装置の較正時に、各アンテナ素子に供給する各送信信号の各送信位相を同一に同期させて、送信移相器の移相量を基準送信移相量とする送信制御装置50を有する。受信位相制御装置は、レーダ装置の較正時に、各送信信号の各方向性結合器を介して各受信装置へ漏れた各送信信号を各受信信号として、各アンテナ素子毎に、各受信信号の各受信位相を同一に同期させて、第1受信移相器の移相量を基準受信移相量とする受信位相制御装置60を有する。 (もっと読む)
レーダ装置
【課題】限られたアンテナサイズで開口径を等価的に大きくすることができ、かつ演算量を低減できるレーダ装置を得る。
【解決手段】
等間隔に配置された複数の受信アンテナと、上記受信アンテナの相対する端部に位置し、隣接する上記受信アンテナとの間隔が上記複数の受信アンテナ配列間隔の半分の自然数倍になされた2つの送信アンテナと、上記2つの送信アンテナから時分割で電波を送信し、目標からの反射波を上記複数の受信アンテナ毎に受信し、得られた受信信号をデジタル・ビーム・フォーミング処理する信号処理器を備え、上記信号処理器は、受信信号を時間方向の高速フーリエ変換処理をした後、空間方向の高速フーリエ変換処理を行うようにしたものである。
(もっと読む)
追尾装置
【課題】高精度で測角して追尾性能を向上させることができる追尾装置を提供する。
【解決手段】空中線6と、空中線からのモノパルスビームを用いて行われる通常アンテナ開口によるモノパルス測角により、目標を所定の角度範囲に追尾するモノパルス測角処理部101と、モノパルス測角処理部により所定の角度範囲に追尾された目標を、空中線からのモノパルスビームを用いて行われる合成開口によるモノパルス測角により高角度分解能で追尾する高角度分解能処理部102を備えたことを特徴とする。
(もっと読む)
追尾復調受信装置および該追尾復調受信装置による誤差信号生成方法
【課題】オーバーシュート無しに素早くアンテナを追尾対象の方向に指向させる。
【解決手段】本発明の追尾復調受信装置は、アンテナから入力された和信号および差信号を基に、アンテナの現角度と目標角度との角度誤差を表す角度成分信号を生成する角度成分信号生成手段と、角度成分信号生成手段で生成された角度成分信号を角度誤差に応じた利得で増幅して誤差信号として出力する可変利得増幅手段と、を有する。
(もっと読む)
通信装置
【課題】アンテナにより移動体からの電波を追尾する通信装置で、複数のアンテナを切り換えて使用する場合に、追尾の精度を向上させる。
【解決手段】切換手段5が移動体からの電波を受信する複数の系統のアンテナ1、2のうちの1つの系統のアンテナを使用するように切り換え、処理実行手段41、43、44、45、47が受信信号に基づく差信号及び和信号に対してレベル又は位相に関する処理を実行し、角度誤差検出手段51〜53が処理後の差信号及び和信号に基づいてアンテナの角度誤差を検出し、角度調整手段66、3が検出結果に基づいてアンテナの角度を調整し、制御態様記憶手段66が処理の制御態様を各系統毎に対応させて記憶し、処理制御手段66が系統に対応した制御態様に基づいて処理を制御する。
(もっと読む)
物体検知装置、車両、ビームパターン生成方法、プログラム及び記録媒体
【課題】従来の振幅モノパルス処理を用いる物体検知装置では、物体の位置によってはその物体の位置を特定できない場合があった。
【解決手段】複数のビームパターンを有する送信アンテナ105aと、複数のビームパターンを有する受信アンテナ105bと、送信アンテナ105aのいずれかのビームパターンと受信アンテナ105bのいずれかのビームパターンを組み合わせることによって生成される所定の合成ビームパターンを複数種類生成できるビームパターン合成部109と、それらの複数種類の所定の合成ビームパターンの中から予め決められた所定の2つの合成ビームパターンの組み合わせを選択してビームパターン合成部109に生成させるビームパターン選択部111と、それらの複数の所定の2つの合成ビームパターンのそれぞれについて得られる、反射波の受信強度及び物体までの距離に基いてその物体の位置を特定する物体位置特定部108とを備える。
(もっと読む)
アクティブレーダシステム
車両用の例としてレーダシステムは、レーダビームを生成するように動作可能なレーダアンテナと、レーダビームが通る、少なくとも1枚の能動レンズを含むレンズ組立体とを備える。レーダビームは、能動レンズを使用して調整可能な視野を有する。いくつかの例では、能動レンズはメタマテリアルを含み、メタマテリアルは、調整可能な負の率等の調整可能な属性を有し、視野は、メタマテリアルの調整可能な属性を使用して調整可能である。  (もっと読む)
(もっと読む)
レーダパフォーマンスモニタ装置及びレーダパフォーマンスモニタ装置を利用する測角テーブルの生成方法
【課題】モノパルス二次監視レーダで使用される測角テーブルの生成時間を短縮させるレーダパフォーマンスモニタ装置及びこのレーダパフォーマンスモニタ装置を利用する測角テーブルの生成方法を提供する。
【解決手段】入力された回数及び時間間隔を記録するメモリ131と、モノパルス方式二次監視レーダ2から質問信号を受信する受信器121と、測定モードに設定されているときに受信器121が質問信号を受信すると、質問信号に対して回数の応答信号を時間間隔で生成する応答発生器123と、応答発生器123によって生成された応答信号を送信する送信器124とを備える。
(もっと読む)
複合モードレーダ装置
【課題】狭帯域レーダと広帯域レーダとを一体化して協調動作させることで、高性能で高機能な角度測定手段を実現する複合モードレーダ装置を提供する。
【解決手段】複合モードレーダ装置100は、狭帯域レーダ部102と広帯域レーダ部103とが同じ筐体内に設けられており、演算部101からの制御で両者が協調して動作するように構成されている。また、狭帯域レーダ部102及び広帯域レーダ部103で測定されたデータはともに演算部101に入力され、両者から入力した検知データをもとに演算部101で測角を高精度に行えるようにしている。狭帯域レーダ部102は第1の周波数を中心周波数とする狭帯域信号を、また広帯域レーダ103は第2の周波数を中心周波数とする広帯域信号を、それぞれ角度測定に用いている。
(もっと読む)
レーダ装置、レーダ装置の制御装置、レーダ装置の制御プログラム、及びレーダ装置の制御方法
【課題】位相モノパルス式レーダ装置において、アンテナ切替えのスイッチングノイズによる物標の相対距離、相対速度の検知精度の低下を防ぐ。
【解決手段】周波数の上昇区間と下降区間とを含む時間区間ごとにレーダ信号の反射信号を受信する2本のアンテナの組合せを順次切替え、複数の組合せごとに2本のアンテナで受信する反射信号の受信位相差に基づいて物標の角度方向を推定し、前記組合せごとの推定結果から角度方向の検知結果を採用し、レーダ信号とその反射信号の周波数差に基づき物標との相対距離と相対速度を検知するレーダ装置において、前記時間区間の先頭の上昇・下降区間では前記周波数差を用いず、その後の上昇区間と下降区間での前記周波数差を用いて相対速度、相対距離の検知を行う。よって、アンテナ切替えに起因するスイッチングノイズの影響を受けない信号に基づき、相対速度、相対距離を検知できる。
(もっと読む)
追尾アンテナ装置、追尾制御方法およびそのプログラム
【課題】 固有の振幅誤差や位相誤差を補正し、さらに雑音の影響を低減したモノパルス方式を実現し、高い指向精度を達成する。
【解決手段】 アンテナは、目標物からの電波を受信する2つ以上の給電部を備え、各給電部からそれぞれ出力される受信信号の和信号と差信号を生成する和信号・差信号生成手段と、指向誤差がない状態で予め計測された受信信号間の振幅誤差を保有する経路上振幅誤差保有手段と、指向誤差がない状態で予め計測された受信信号間の位相誤差を保有する経路上位相誤差保有手段と、和信号レベルおよび差信号レベルと振幅誤差を用いて受信信号間の位相差を算出する受信信号間位相差算出手段と、受信信号間の位相差と経路上位相誤差保有手段から入力する位相誤差を用いて、アンテナの指向誤差角を算出して指向方向可変手段に出力する指向誤差角算出・制御手段とを備える。
(もっと読む)
モノパルス自動追尾アンテナ給電装置
【課題】TE21モードカプラ及び電力合成回路を同一誘電体基板上に構成することで装置の軽量、小形化を図ると共に電力合成時の位相誤差に起因する追尾精度の劣化を抑圧する。
【解決手段】ホーンアンテナ1内の管軸方向と直交する面内に金属板3の表裏に装着された第1と第2の誘電体基板2a,2bを挿入し、金属板と第1と第2の誘電体基板の管軸中心部をくり抜き、第1の誘電体基板の上面に90度間隔で4本の先端開放プローブ5a、6a、7a、8aを配置し、TE21モードを検出する第1のモードカプラと、第2の誘電体基板の下面に90度間隔でかつ第1のモードカプラの先端開放プローブとは互いに45度ずれた位置関係で4本の先端開放プローブ5b、6b、7b、8bを配置し、TE21モードを検出する第2のモードカプラと、第1と第2の誘電体基板上に設けられて第1と第2のモードカプラの出力信号を電力合成するための電力合成回路とを備える。
(もっと読む)
探知測距装置および探知測距プログラム
【課題】レーダー等の複数の探知機で求めた相対距離等に基づいて、単純な計算で正確な相対速度ベクトルを求めることができる探知測距装置および探知測距プログラムを提供すること。
【解決手段】送信した電磁波の被探知物体での反射波を受信することにより被探知物体までの相対距離を測定する第一の相対距離測定手段と、第一の相対距離測定手段と異なる位置に配置され、送信した電磁波の被探知物体での反射波を受信することにより被探知物体までの相対距離を測定する第二の相対距離測定手段と、第一の相対距離測定手段によって測定した相対距離と第二の相対距離測定手段によって測定した相対距離とに基づいて、第一の相対距離測定手段から被探知物体に対する方向又は第二の相対距離測定手段から被探知物体に対する方向に対して任意の角度を成して移動している被探知物体の実速度ベクトルを算出する実速度ベクトル算出手段とを備える。
(もっと読む)
車載用レーダシステム
【課題】角度確定可能範囲外であっても反射波を受信可能な領域に存在するターゲットに対応することができる車載用レーダシステムを提供する。
【解決手段】電波を送信する送信してターゲットから反射される電波を受信し、得られたターゲット信号からターゲットの距離、相対速度及び方位角度を算出し、ターゲットの方位角度は、所定の角度確定範囲において算出可能であり、ターゲット信号からターゲットが前記角度確定範囲内かどうかを判定して、前記角度確定範囲内にターゲットがあると判定した場合、ターゲットの距離、相対速度及び方位角度に基づいて前記ターゲットが自車に衝突する危険性があるかどうかを判定し、前記角度確定範囲外にターゲットがあると判定した場合、ターゲットの距離及び相対速度に基づいて前記ターゲットが自車に衝突する危険性があるかどうかを判定する。
(もっと読む)
レーダ装置
【課題】検出範囲を広げるとともにコストを抑えたレーダ装置を提供すること。
【解決手段】左右の受信アンテナを偏向させるように設置する。このとき、互いに重複範囲が存在するように設ける。重複範囲はDBFによる処理、それ以外の範囲ではモノパルスによる処理を行う。
(もっと読む)
レーダ情報処理装置
【課題】個別レーダは極力小型軽量の装置規模を維持しながら、目標の航跡位置情報の信頼性向上を可能にする。
【解決手段】各レーダと目標との相対距離に応じてS/Nウェイト係数を算出するS/Nウェイト計算部と、各レーダと目標との相対位置に応じて位置ウェイト係数を計算する位置ウェイト計算部と、当該装置の自己位置を標定する自己位置標定部と、スキャンごとに各レーダから受信した目標の位置情報のそれぞれに対して、算出されたS/Nウェイト係数および位置ウェイト係数を乗じ、ウェイト付けされた位置情報を合成し、合成された位置情報を当該装置の自己位置に基づいて絶対的な目標位置に変換する位置計算部を備え、位置計算部で算出された前後のスキャン時の絶対的な目標位置に基づいて追尾処理を行う。
(もっと読む)
モード「S」での応答の処理中にマルチパス伝搬の影響を軽減するための方法
本発明に係る処理方法は、監視レーダーによって質問された目標物からの応答を、監視レーダーの受信ローブ内に存在する全ての目標物に対するモードS質問に従って処理する方法であって、
監視レーダーの受信ローブ内に存在する種々の目標物が少なくとも1回質問され、それぞれの質問後に当該ローブについて受信された一連のモードS応答信号が収集され、応答検出処理操作が目標物ごとに実行され、誤りが検出され、必要に応じて誤りが訂正され、対応するブリップが抽出される方法において、
信号の品質の検出及び判定処理操作が、各目標物に対する各質問への一連の応答を使用して合成メッセージを形成することと、メッセージのビットごとに、当該ビットの値と品質を確定することと、この合成メッセージを使用して誤りの検出と訂正を実行することとを含むと共に、同じ対象物からの全ての失敗応答の3つの変数Σ、Δ、及びモノパルスを利用して合成メッセージを構築することを特徴とする。
この処理操作は、既存の方法が適していない極めて汚染度の高い電磁環境(応答失敗以外の理由で同じ目標物に質問が再度送信される場合がある)で有用である。
(もっと読む)
101 - 120 / 180
[ Back to top ]