
Fターム[5J070AE12]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 気象 (148)
Fターム[5J070AE12]の下位に属するFターム
雨又は雲 (59)
Fターム[5J070AE12]に分類される特許
81 - 89 / 89
レーザレーダ装置

【課題】 基準目標を設けることなく、気象条件の変化にかかわらず、良好な信号雑音比を保持し、高精度な後方乱気流の検出を実現する。
【解決手段】 航空機の飛行経路区間に設けられた観測領域内にレーザ光を放射してその反射光を受信する光送受信部と、この光送受信部から出力された受信信号を複数の異なる積分数にて積分処理し、前記積分数毎に前記光送受信部から出力された受信信号の信号雑音比を算出する信号雑音比算出処理部とを備え、この信号雑音比算出処理部により算出された複数の信号雑音比の中から予め定めた条件を満たす信号雑音比を算出した積分数により前記光送受信部から出力された受信信号を積分処理して航空機の通過により発生した後方乱気流を検出する。
(もっと読む)
レーダ装置とその風速観測方法

【課題】 観測覆域を狭めることなく観測できる風速の上限を高くする。
【解決手段】 レーダ覆域を所定の距離で2つの領域に区分し、近距離の領域については期間A及び期間A′の送信パルスで生成した送信信号(以下、モードA)、その外側の領域については期間B及び期間B′の送信パルスで生成した送信信号(以下、モードB)を用いる。そして、水平方向の一回転毎にモードを切り替え、信号処理装置16にて近距離側領域の観測結果と遠距離側領域の観測結果を別々に得て、両者を合成する。すなわち、モードAでは近距離側領域のみ観測可能で、その外側の領域の観測は不能であり、逆にモードBでは近距離側領域は観測不能であるがその外側の領域は観測可能である。そこで、両者の観測結果を合成することで、レーダ覆域に観測不能領域がなくなり、レーダ覆域全体の観測が可能となる。
(もっと読む)
気象レーダシステム及びそれに用いられる信号処理方法
【課題】 安定した性能により受信した信号の有意性を判定可能とする。
【解決手段】 発射した電波の反射信号を受信して受信強度情報を検出し、この受信強度情報を用いて気象情報を取得する。受信した反射信号について直交位相検波を行う直交位相検波部11と、該直交位相検波部11の出力について高速フーリエ変換処理を行ってパワースペクトラムを求めるFFT処理部12と、前記FFT処理部12の出力に基づいて受信信号のトータルパワーを算出するトータルパワー算出部13と、前記FFT処理部12の出力したスペクトラムをIQ平面においてベクトル合成するベクトル合成部14と、算出されたトータルパワーと合成されたベクトルとに基づき、前記受信した信号に含まれるノイズ成分量を検出して、前記受信信号の有意性を判定する判定部15とを具備する。
(もっと読む)
乱気流を遠隔的に測定するシステム
乱気流を検知するシステム及び方法は、数台の移動プラットフォームと、移動プラットフォーム速度センサと、数台の電磁エネルギー送信器及び受信器とを含む。受信器は、送信器によって送信されたエネルギーを、乱気流を被る経路沿いに進んだ後に、受信する。受信器は、乱気流によって生じるエネルギーの変化を検知し、(送信器または受信器のいずれかが配置された)移動プラットフォームの速度の効果を変化から選別する。加えてシステムは、の3次元モデルを作成できる。別の実施形態において、本発明は移動プラットフォームを使って乱気流を検知する方法を提供する。方法は、乱気流を被る経路に沿って進んだ電磁エネルギーを受信することと、乱気流によって生じたエネルギーの変化を判定することとを含む。好ましくは受信器が配置される移動プラットフォームの速度の効果は変化から選別される。  (もっと読む)
(もっと読む)
レーダ装置
【課題】 距離の曖昧さが原因で生じる2次エコーを抑圧して探知性能を高めることができるレーダ装置を得ることを目的とする。
【解決手段】 長パルスBに係るビデオ信号に孤立波形が含まれているか否かを判定し、孤立波形が含まれていなければ、その長パルスBに係るビデオ信号に対する圧縮処理を実施し、孤立波形が含まれていれば、その長パルスBに係るビデオ信号から孤立波形を除去して、除去後のビデオ信号に対する圧縮処理を実施する。これにより、距離の曖昧さが原因で生じる2次エコーを抑圧して探知性能を高めることができる。
(もっと読む)
ウィンドプロファイラ・システム
【課題】 観測データのうち正常なデータを残し信頼性が低いデータを削除する。
【解決手段】 信号処理装置2は受信した観測データからスペクトルデータを算出しスペクトルデータをモーメントデータに変換する。データ処理装置3はモーメントデータについて品質管理処理を行い、その結果のデータとスペクトルデータとから表示データを作成して観測データの再生を行う。品質管理処理部32は、5方向毎に視線風速の大きさについて高度毎,時間毎に周囲の視線風速の大きさと比較して所定の閾値外のものを排除する時空間チェックと、水平風速の東西成分に対する南北成分の比率について高度毎および時間毎に周囲の正接と比較して所定の閾値外のものを排除する時空間チェックを行う。
(もっと読む)
気象予測方法
【課題】 観測値を用いて気象予測精度を向上する。
【解決手段】 GPVデータの初期値を取った時刻(9時)とGPVデータを受信完了した時刻(15時)との間において観測値が観測されている。気象モデル(RAMS)を用いた気象予測演算は、15時ではなく9時から開始し、9時から15時の間の予測演算値に対して観測値により同化処理をする。このように観測値を用いて同化処理しているため、15時における予測精度が向上し、更には、15時を含めて15時以降の気象予測精度が向上する。
(もっと読む)
気象予測システム及び気象予測方法
【課題】 雨水量のレーダデータ同化を終了した後に予測計算を継続しても、モデル領域内での降雨状況を模擬し続けられるようにする。
【解決手段】 気象予測モデルに対して雨水量のレーダデータ同化を行って雨水量を算出した後(S21)、モデル領域内のある定義点の周囲に同化された雨水量が既定値以上存在する(水蒸気が豊富に存在する)かどうかの水蒸気量の推定計算を行い(S22)、周囲にレーダ同化された雨水が存在するか否かを判定する(S23)。この判定で、雨水が存在すると判定された場合には、水蒸気ボーガスを作成してモデル内にデータ同化する(S24)。これにより、モデル領域内でレーダデータ同化された雨水が直ちに落下しても、空中に漂う水蒸気をモデル領域に残すことができる。降雨地点は周囲も含めて擾乱が激しいので、その水蒸気が凝結して雲や雨を生成することが期待され、モデル領域内で「雨を降り続かせる」ことが可能になる。
(もっと読む)
降水特性を推定するための方法
本発明は、降水特性を推定する方法、より詳細には、固体降水現象の降水率を推定する方法に関する。この方法は、少なくとも1つの降水地域の鉛直平面、および鉛直方向Zにおける反射率を表すデジタル信号を提供するための鉛直プロファイル処理を含む、
レーダ画像を取得するステップを備える。この方法は、各粒子質量で重み付けされた、鉛直平面における粒子平均直径のプロファイルを表す信号を送出するために、反射率を表す信号を積分するステップ、および先行ステップで計算された信号から固体粒子濃度を決定するステップを含むことを特徴とする。 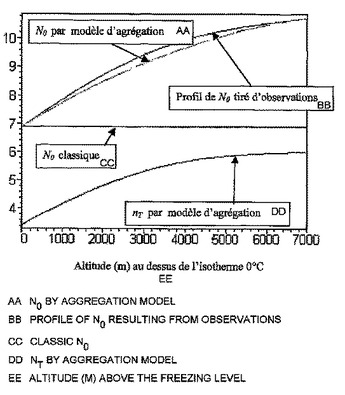 (もっと読む)
(もっと読む)
81 - 89 / 89
[ Back to top ]