
Fターム[5J070AJ07]の内容
レーダ方式及びその細部 (42,132) | ビデオ信号の処理 (1,196) | 信号の除去又は付加 (166) | 間引き (13)
Fターム[5J070AJ07]に分類される特許
1 - 13 / 13
周波数検出方法及び装置
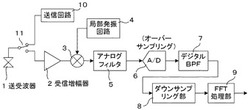
【課題】所望の周波数分解能力を維持しながらフーリエ変換におけるサンプリング周波数を低くしてサンプル数を少なくし、複素乗算回数を減らす。
【解決手段】周波数fcを含む所定の周波数帯域幅Δfp内で受信信号の周波数解析を行う装置は、受信信号の周波数変換を行う変調器3と、変調器3の出力に接続したアナログフィルタ4と、アナログフィルタ4の出力をオーバーサンプリングでデジタル信号に変換するA/D変換器6と、A/D変換器6の出力から周波数帯域幅Δfpに相当する成分を抽出するデジタルBPF(バンドパスフィルタ)7と、周波数ゼロからΔfpに相当する帯域幅内に配置されるように、デジタルBPF7から出力される信号をダウンサンプリングするダウンサンプリング部8と、ダウンサンプリング部8の出力に対して高速フーリエ変換を行うFFT処理部9とを備える。
(もっと読む)
レーダ装置及びアレーアンテナ

【課題】 原点及び原点近傍の同一座標上に配置されるアンテナ素子へ与える位相が複雑であっても、その位相制御が容易なレーダ装置及びアレーアンテナを提供する。
【解決手段】 レーダ装置は、アレーアンテナ、送信部、受信部、位相制御部及び信号処理部を具備する。アレーアンテナは、アンテナ素子と送受信モジュールとが予め設定された数だけ整列されて成る第1及び第2のサブアレーアンテナを複数備え、アンテナ開口の中心線近傍では、第1及び第2のサブアレーが混同して配置される。送信部は、送信信号を生成してアレーアンテナへ出力する。受信部は、アレーアンテナで受信された受信信号に対して受信処理を行う。位相制御部は、第1のサブアレーと、第2のサブアレーとが逆位相となり、アンテナ開口でのΔ信号の振幅分布がアンテナ開口の中心線近傍で小さくなるように送受信モジュールを制御する。信号処理部は、受信信号から所望信号を取得する処理を行う。
(もっと読む)
航空機の監視レーダシステム及び航空機の監視方法
【課題】航空機のトランスポンダから送信される捕捉スキッタまたは拡張スキッタの送信周期を利用して、モードSアドレステーブルに保持するモードSアドレスの数を必要最小限にし、かつ最新状態に保つ。
【解決手段】All Call Error Correction2はモードSアドレスを抽出し、モードSアドレステーブル5に蓄積する。Timer Reset Cntrl6は前記蓄積したモードSアドレスを、捕捉スキッタまたは拡張スキッタの送信周期よりも長い削除周期毎に削除する。Roll Call Error Correction8は航空機搭載のトランスポンダから送信される個別識別応答9から、モードSアドレス及びデータを抽出する。Comp CNTRL7は前記個別識別応答に含まれる前記モードSアドレスと、モードSアドレステーブル5内に蓄積した全てのモードSアドレスとを比較照合し、誤り訂正を行う。
(もっと読む)
マルチラテレーションシステム、マルチラテレーション受信局の信号処理方法、及びその処理プログラム
【課題】複数の航空機の位置情報を抽出するマルチラテレーションシステムにあって、各モードA/C機からの応答情報を不規則に選択処理しシステム負荷の軽減を図ること。
【解決手段】航空機(目標物)が搭載するトラスポンダからのスキッタ信号若しくはSSR応答信号を受信する複数の受信局1,2,…と、この受信された各信号の到達時間差から目標物の三次元位置情報を算出し且つ目標物の識別情報を得る位置情報算出手段(センタ局)120とを備え、各受信局1,2,…は、受信したSSR応答信号を情報分析するSSR応答デコード手段12と、ここで得られたモードSスキッタ,モードS応答,及びモードA/C等のメッセージに編集してセンタ局へ出力するメッセージ生成手段13とを備え、モードA/Cを経時的に不規則に選択して前記メッセージ生成手段13に送り込むモードA/C信号間引手段14を設けたこと。
(もっと読む)
空港面監視方法及び空港面監視システム
【課題】 複数の目標が接近して一目標と認識してしまう程度の方位分解能である一次レーダであっても、二次レーダを利用して、方位分解能を擬似的に向上させ、近接した複数の目標の誤検出を減少させて、精度の高い航跡(統合航跡)を生成することが可能な空港面監視方法及び空港面監視システムを提供すること。
【解決手段】 一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視方法において、前記二次レーダが検出した二つの目標位置の目標間距離が、前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能よりも小さいときに、前記目標間距離の中間座標及び中間座標の周辺に相当する前記一次レーダによる目標のエコーを間引き、前記一次レーダによる目標位置を検出して目標の航跡を得る。
(もっと読む)
ストリーミング測定値からストリーミング信号を再構築するための方法
【課題】方法が、測定値の作業セット、測定システムの作業スナップショット、内部作業信号推定値、及び外部作業信号推定値を保持することによって、ストリーミング測定値からストリーミング信号xnを再構築する。
【解決手段】現在の測定値の作業セットを使用して、内部作業信号推定値、測定システムの作業スナップショット、及び信号スパース性のモデルが精緻化される。外部作業信号推定値がリフレッシュされる。外部作業信号推定値の係数のサブセットが出力にコミットされる。次のストリーミング測定値及び対応する次の測定ベクトルが受信される。測定値の作業セット、測定システムの作業スナップショット、及び内部作業信号推定値が更新されて、次の測定値及び対応する測定ベクトルが組み込まれる。最も古い測定値及び対応する最も古い測定ベクトル、並びにコミットされた係数のサブセットの効果が除去される。
(もっと読む)
レーダ装置、信号処理装置
【課題】
指向角度を間引いてレーダ信号を送出しても物標の角度検出精度の低下を防止する。
【解決手段】
アンテナが第1の方向に回動するときには、前記アンテナにより間欠的な第1の指向角度群でレーダ信号を送受信し、前記送受信されたレーダ信号の周波数差を有する第1のビート信号群を生成し、前記第1の方向と反対の第2の方向に回動するときには、前記アンテナにより前記第1の指向角度群とは異なる間欠的な第2の指向角度群でレーダ信号を送受信し、前記送受信されたレーダ信号の周波数差を有する第2のビート信号群を生成する。そして、前記第1のビート信号群の第1のピークと、前記第2のビート信号群の第2のピークとを検出し、前記第1のピーク形状における極大値と前記第2のピーク形状における極大値とに基づき、物標の角度を検出するので、物標の角度検出精度の低下を防止することができる。
(もっと読む)
パッシブコヒーレント探索アプリケーションのための、広帯域事前検出信号を処理するシステムおよび方法
【課題】PCLアプリケーションのための、広帯域事前検出信号を処理するシステムおよび方法を提供する。
【解決手段】信号を受信し、変換,チャネル歪みの補償,復調し、複素数を形成する。また、復調信号から基準信号および目標物信号を推定する。この目標物信号内の基準信号の一部を減らすため、基準信号は、目標物信号に関して適応的にフィルタリングし、目標物信号と結合して、基準信号の一部を減らす。目標物信号および基準信号に対して逆変換オペレーションを実施し、出力目標物信号について、複数の目標物ビームを形成する。複数の目標物ビームのそれぞれについて、間引きした複数のラグ積を形成する。基準信号について、間引きした複数のラグ積を形成する。複数の目標物ビームのそれぞれについてクロスアンビギュイティ関数を推定する。基準信号についての上記間引きした複数のラグ積を用いて、基準信号についてオートアンビギュイティ関数を推定する。
(もっと読む)
レーダ装置
【課題】目標までの距離に応じて最適な距離分解能・相対速度分解能を設定可能なレーダ装置を提供する。
【解決手段】周波数変調すると共にパルス化した電波を送受信して目標203までの距離と相対速度を求めるFMパルス方式のレーダ装置において、送信タイミングから一定時間毎にサンプリングタイミングを定めるレンジゲート手段205と、レンジゲート毎に、周波数上昇区間あるいは周波数下降区間においてサンプリングを行うサンプリング手段206と、サンプリング手段206で得られたサンプリングデータをもとに、フーリエ変換の入力として用いる計測用データを設定し、計測用データの初めから終わりまでのサンプリングに要した時間を計測時間とした時、レンジゲート毎に計測時間を変更する計測時間変更手段207を備える。
(もっと読む)
物体検出装置
【課題】物体の端部を高精度に特定することができる物体検出装置を提供する。
【解決手段】自車両の前方を走行する他車両の位置情報を一定の周期で繰り返して検出するLIDAR2と、自車両の前方を撮像して自車両の前方を走行する他車両を撮像するカメラ3と、LIDAR2から送信されるLIDAR点列と、カメラ3から送信される撮像画像撮像画像とにより、自車両の前方を走行する他車両の端部を特定して、この他車両の中心位置及び向きを検出するECU4とを備えている。そして、このECU4は、LIDAR点列に近似された物体検出直線αと、撮像画像における矩形領域の左右端の方位直線β1,β2との交点x1,x2を、他車両21の左右端部として特定する。
(もっと読む)
パッシブコヒーレント探索アプリケーションのための、広帯域事前検出信号を処理するシステムおよび方法
【課題】PCLアプリケーションのための、広帯域事前検出信号を処理するシステムおよび方法が開示される。
【解決手段】入力信号を受信、上記入力信号のチャネル歪みを補償後復調し、複素数値表現を形成、上記復調した入力信号から基準信号および目標物信号を推定し、上記基準信号の一部を減らすことであって、上記基準信号は、適応的にフィルタリングされ、出力目標物信号が形成され、上記基準信号の一部を減らすこと、上記出力目標物信号、基準信号に対して逆変換オペレーションを実施、上記出力目標物信号について、複数の目標物ビームを形成、ビームのそれぞれについて、間引きした複数のラグ積を形成、上記基準信号について、間引きした複数のラグ積を形成、ビームのそれぞれについてクロスアンビギュイティ関数を推定、上記基準信号についての上記間引きした複数のラグ積を用いて、上記基準信号についてオートアンビギュイティ関数を推定することを含む。
(もっと読む)
レーダ装置
【課題】レーダ装置と観測目標との間に相対運動がある場合にも、効率的なビーム走査を実現することのできるレーダ装置を得る。
【解決手段】波動を空間へビーム状に放射するビーム放射部20、30と、ビーム放射部が放射するビームの向きを走査するビーム走査部40とを備えたレーダ装置において、ビーム走査部40は、観測領域に隙間を持たせるように1回の走査を行い、複数回の走査を行うことにより観測領域のすべての走査を行うものである。
(もっと読む)
パルス圧縮レーダ用データ再生装置、再生方法及びパルス圧縮レーダ装置
【課題】A/D変換後デジタル的にIQ分離を行うリアル方式のパルス圧縮レーダ用データ再生装置として、IQ分離にデジタルフィルタを使用せず、回路の小型化・軽量化が可能で、かつ、対象信号の帯域幅に応じたサンプリング速度の低減を可能とする。
【解決手段】受信機2で周波数変換した受信信号をA/D変換器32でA/D変換してデジタルIQ分離回路33でデジタル的にI信号とQ信号に分離した後、間引き処理回路34で帯域幅に応じて1/n(n:整数)に間引きし、0詰め処理回路41で、間引いたデータ部分及びI信号とQ信号とで時間的に交互にずらして生じた空きデータ部分にデータ無しを意味する0詰めを行って、信号と虚像信号との重なりをなくし、しかる後、FFT42で周波数軸上のデータに変換後、相関処理回路43で参照関数を用いた相関処理により虚像信号を除去した信号成分のみをパルス圧縮して、逆FFT44で時間軸上のデータに戻す。
(もっと読む)
1 - 13 / 13
[ Back to top ]