
Fターム[5J070BF01]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 危険度判定 (267)
Fターム[5J070BF01]の下位に属するFターム
Fターム[5J070BF01]に分類される特許
41 - 54 / 54
衝突危険予測システム、および、プログラム
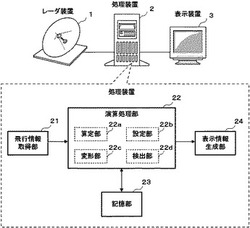
【課題】 航空機同士の衝突危険状態を適切に検出することのできる衝突危険予測システム等を提供する。
【解決手段】 レーダ装置1は、レーダスキャン等により、管制すべき各航空機の飛行位置、速度及び、方向を含む飛行情報を、それぞれ取得する。処理装置2は、レーダ装置1により取得された飛行情報に基づいて、各航空機の速度ベクトルを求め、速度ベクトル同士から定まる相対ベクトルを算定する。処理装置1は、予め定められた円柱形状からなる保護領域を、各航空機の飛行位置に対応する仮想空間にそれぞれ設定すると、この各保護領域に、算定した相対ベクトルに応じて半径等の長さが異なる扇形柱形状の領域を、各航空機の進行方向に対応させてそれぞれ付加し、各保護領域を拡張させる。そして、処理装置2は、拡張させた保護領域同士の重なりに基づいて、衝突危険状態を検出する。
(もっと読む)
衝突予知装置および衝突予知方法

【課題】様々な交通環境の変化に対応して、車両前方の物体を正確に検出することができ、衝突を精度良く予知することができる衝突予知装置を提供することを課題とする。
【解決手段】衝突予知装置1であって、異なる手段で車両前方の物体を検出する複数のセンサ20,30と、入力された条件に適したセンサ20,30を選択し、選択されたセンサ20,30から得られた情報に基づいて、自動車Aと前方の自動車との衝突を予知する制御部10とを備えていることを特徴としている。
(もっと読む)
レーダ装置
【課題】様々な走行状況において障害物を効果的に検出する。
【解決手段】発振器10は、FM−CWモードとCWモードの両方で発振信号を出力し、スイッチ14は広角送信アンテナ16a、狭角送信アンテナ16bを切り換えて電波を送信する。送信波は障害物に当たって反射され、受信アンテナで受信される。受信アンテナ20で得られる受信信号をミキサ22で送信波と混合し、得られた差信号をフィルタ24でフィルタリングしてビート信号を得る。ビート信号に基づき、信号処理回路26が障害物の距離、速度を検出する。そして、制御回路30は、2種類のモード、2種類の送信アンテナ16a、16bを適応的に切り換えて、各種状況で効果的な障害物の検出を行う。
(もっと読む)
物体検出装置
【課題】 2つの検出手段のうちの一方の検出手段で物体を検出できない場合でも検出対象の物体を設定することができる物体検出装置を提供することを課題とする。
【解決手段】 レーダによる情報と画像による情報に基づいて物体を検出する物体検出装置1であって、レーダによって物体を検出するレーダ検出手段2と、画像によって物体を検出する画像検出手段3と、レーダ検出手段2によって検出した物体の位置情報と画像検出手段3によって検出した物体の位置情報に基づいてレーダ検出手段2によって検出した物体と画像検出手段3によって検出した物体とが同一物体か否かを判断する判断手段8とを備え、2つの検出手段2,3の一方の検出手段で過去に同一物体と判断した物体を検出できない場合、当該過去に同一物体と判断した物体に設定された情報から求めた予測移動軌跡と他方の検出手段で検出した物体の位置情報とに基づいて同一物体か否かを判断することを特徴とする。
(もっと読む)
物体検出装置
【課題】 物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】 レーダによる情報と画像による情報に基づいて物体を検出する物体検出装置1であって、レーダによって物体を検出するレーダ検出手段2と、画像によって物体を検出する画像検出手段3と、レーダ検出手段2によって検出した物体の位置情報と画像検出手段3によって検出した物体の位置情報に基づいて、レーダ検出手段2によって検出した物体と画像検出手段3によって検出した物体が同一物体か否かを判断する判断手段10とを備え、判断手段10は、画像検出手段3によって検出した物体に対してレーダ検出手段2によって検出した物体が複数個対応している場合、当該複数個の物体のうち車両中心の推測走行軌跡に近い物体を同一物体と判断することを特徴とする。
(もっと読む)
車両用物体検出装置
【課題】 アレーアンテナを用いて高精度に物体を検出できる領域が拡張された車両用物体検出装置を提供すること。
【解決手段】 車両に搭載され、自車両周辺の物体(移動体又は停止物)を検出する車両用物体検出装置に、第一の領域においては第一の精度で物体を検出し、第一の領域とは異なる第二の領域においては第一の精度よりも低い第二の精度で物体を検出する1以上の検出器から成る物体検出手段と、物体検出手段により第一の領域内の複数の場所でそれぞれ検出された複数の物体相対位置に基づいて物体のその後の相対移動軌跡を推定する軌跡推定手段と、物体検出手段により第二の領域内で検出された物体相対位置と軌跡推定手段により推定された物体の推定相対移動軌跡とが重なったとき、第二の領域内で検出された物体相対位置を第二の精度より高い第三の精度で検出されたものとみなす精度補正手段とを備える。第三の精度は、例えば、第一の精度と等しい。
(もっと読む)
電磁放射を放射および/または受信するための装置および方法
電磁放射を放射および/または受信するための装置(100)および方法を発展し、該装置(100)のエレベーション方向(E)のビームローブの角度(Θ)を簡単かつ低コストで実現するため、異なるアンテナ素子(32,34,36,38)によって放射および/または受信される放射の位相シフト(Δφ)、ないしは電磁放射の放射および/または受信のエレベーション方向(E)の角度(Θ)が、
・線路(20)の実効誘電率(εeff)とりわけ伝播係数を変化させることによって調整され、および/または
・少なくとも部分的に導電性の材料から形成された少なくとも1つのエレメント(50,52,54)を、線路(20)および/またはアンテナ素子(32,34,36,38)までの間隔が変更可能であるように配置することによって調整されるように構成することが提案される。  (もっと読む)
(もっと読む)
FM−CWレーダ装置
【課題】 隣接して複数の目標物がある場合、それぞれの目標物からの受信信号がお互い干渉して目標検出のための閾値が上がり、目標物を検出できなくなるおそれがあった。
【解決手段】 目標検出のための閾値は、目標がない状況で受信したビート信号のノイズ成分の平均値や、送受信機と地面の角度や、送受信機の利得や送受信機の温度や、降雨状態をパラメータにして決定し、目標物の振幅値で閾値が左右されないようにすることで、目標物の不検出を抑えた。
(もっと読む)
アンビギティー検知式周波数偏位変調
距離範囲検知装置は、マイクロ波信号を送信するようになされた送信機(4)、及び目標から反射した、送信信号の一部に対応するエコー信号を受信する受信機(4)と、前記送信信号を発生するために前記送信機(4)に供給される駆動信号を発生する信号発生手段(2)であって、信号発生手段の発生する駆動信号には、少なくとも2つの周波数を含む第1の信号フレーム(300a)と少なくとも2つの周波数を含む第2の信号フレーム(301a)が含まれており、前記第2の信号フレーム(301a)は前記第1の信号フレーム(300a)と異なる信号発生手段(2)と、前記送信信号と共に前記エコー信号を処理して前記エコー信号を発生した目標までの距離を決定するプロセッサ(11)を備える。本装置は、自動車の、代表的には車間距離制御(ACC)機能における周波数偏位変調(FSK)レーダーに特に適している。本装置は距離測定のアンビギティーを低減可能である。アンビギティーを低減する対応方法も開示される。 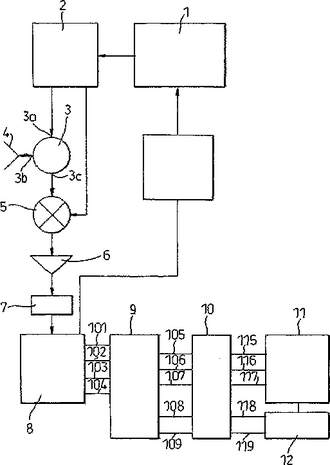 (もっと読む)
(もっと読む)
レーダ装置およびレーダ信号処理方法
【課題】目標速度によって方位角誤差が変化することなく、並走する目標などにおいても誤検知を防止することのできるレーダ装置およびレーダ信号処理方法を得る。
【解決手段】アンテナ方向制御部113は、アップフェーズにおける観測時とダウンフェーズにおける観測時で電波ビームの方向が異なるようにアンテナ106を向ける。
信号処理部112内の方位角算出手段は、アップフェーズにおける方位角とダウンフェーズにおける方位角を算出し、信号処理部112内の方位角判定手段は、アップフェーズにおける方位角とダウンフェーズにおける方位角の差の大きさから検知目標に関する観測データの出力内容を選択する。
(もっと読む)
非放射性誘電体線路ならびにそれを用いた高周波送受信器、レーダ装置、レーダ装置搭載車両およびレーダ装置搭載小型船舶
【課題】 実用的であって簡単かつ緻密に特性インピーダンスを調整することができる非放射性誘電体線路を提供すること。
【解決手段】 高周波信号の波長の2分の1以下の間隔で平行に配置された平板導体1,2間に高周波信号を伝搬させる誘電体線路3が配置されており、平板導体1,2の少なくとも一方の内面に誘電体線路3の一部に対向する凹部4が形成されている非放射性誘電体線路である。誘電体線路3を伝播する電磁波が凹部4へと漏れ出し、凹部4がスタブのように定在波を形成するような働きをするため、凹部4の底部4bまでの深さを変えることにより、入力端3aから出力端3b側を見た反射係数を連続的に変化させることができるので、凹部4の深さを変えるだけで簡単に、非放射性誘電体線路の特性インピーダンスを所望の条件に合うように連続的に変化させることができる。
(もっと読む)
車両周囲監視装置およびそれを具備した車両
【課題】 1つのセンサで車両周囲の広い領域が監視可能となる車両周囲監視装置およびそれを具備した車両を提供する。
【解決手段】 本発明の車両周囲監視装置は、物体の存在を検知する、あるいは物体までの距離を計測するセンサ1と、センサ1からの情報に基づいて車両100と物体との衝突などの危険度を判断する処理部3とを有する。センサ1は、車両の車輪側面に固設され、車両100が走行した際、センサ1とそのビームBとが車輪回転軸を中心に回転する。これによって、車両100が走行した場合、センサ1が検知する領域をセンサ単体の検知領域より広くすることができる。
(もっと読む)
自動車用物体認識システム
本発明は、少なくとも2個の物体認識センサを備え、該センサの認識範囲が進行方向において部分的に重なる、自動車用の物体認識システムに関する。本発明によれば、第1の物体認識センサが、所定の第1垂直認識角度において、その認識範囲内で道路表面を付随的に検出し、第2の物体認識センサは、第1の物体認識センサの第1垂直認識角度未満である所定の第2垂直認識角度において、第1の物体認識センサの認識範囲内で、進行方向において道路表面を検出しない。両方の物体認識センサが物体を認識したときに限り、評価ユニットが第1の物体認識センサの認識範囲において物体の存在を推測する。 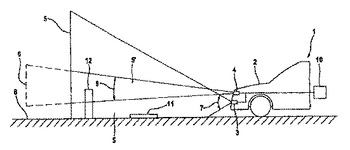 (もっと読む)
(もっと読む)
レーダ装置
【課題】 自移動体の航路策定に対する影響の高い周辺移動体の識別を容易にする。
【解決手段】 レーダ装置10は、探知信号に基づいて周辺移動体の動作変化量を算出する動作変化量算出部24と、動作変化量の所定値に対する大小を判別する動作変化量判別部26と、を備える。出力部12は、探知結果に加えて、動作変化量判別部26による動作変化量の判別結果を出力する。
(もっと読む)
41 - 54 / 54
[ Back to top ]