
Fターム[5J070BF04]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 危険度判定 (267) | 方向 (34)
Fターム[5J070BF04]に分類される特許
1 - 20 / 34
車両用物体検知装置
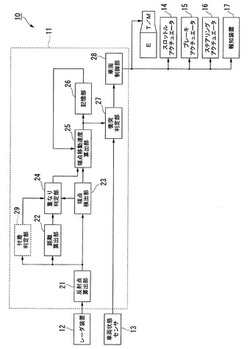
【課題】自車両の外部に存在する物体の静止および移動の状態を精度良く検知する。
【解決手段】車両用物体検知装置10は、レーダ装置12から発信された電磁波の物体上における反射点の位置を算出する反射点算出部21と、自車両から物体までの距離を算出する距離算出部22と、反射点の位置に基づき物体の水平方向の両方の端点を検出する端点検出部23と、検知対象物の何れか一方の端点が自車両から見て比較対象物に重なっているか否かを判定する重なり判定部24と、重なり判定部24により重なっていると判定され、かつ、時間経過と共に検知対象物までの距離が比較対象物までの距離よりも近くなった場合に、検知対象物の前記比較対象物に重なっていない他方の端点の横移動量に基づいて検知対象物の横移動速度を算出する端点移動速度算出部25とにより、検知対象物の横移動速度の検出精度を向上させる。
(もっと読む)
センサを用いた追突事故防止装置

【課題】速度のみが検出可能な非接触式のミリ波センサの出力情報のみで、追突事故を防止するために運転手に警報を与えるシステムを比較的安価に提供する。
【解決手段】複数のミリ波センサにより、同一方向の目標物との相対速度が測定可能な構成となっていて、かつ各々のミリ波センサの検出範囲を異なるものとし、最も遠くから検出できるミリ波センサから順に判定用の速度閾値を小さくなるようにあらかじめ設定し、各々のミリ波センサで計測した速度がそれぞれ設定された閾値以上であるか判定し、閾値以上であった場合には追突する可能性があると判定するように構成した。
(もっと読む)
衝突予測装置
【課題】自車の前方に検出されたターゲットの自車に対する相対位置に応じて、当該ターゲットが自車の左側を通過するか、または右側を通過するかを予測し、自車とターゲットとの衝突可能性を適切に推定する衝突予測装置を提供する。
【解決手段】本発明の衝突予測装置は、自車の前方にターゲットを検出するターゲット検出手段と、ターゲットの自車に対する相対位置を算出する相対位置算出手段と、当該相対位置に基づいて、ターゲットが、自車の左側を通過するか、または右側を通過するかを示す通過予測情報を設定する通過予測情報設定手段と、相対位置の変化を監視する相対位置監視手段と、相対位置の変化に基づいて、通過予測情報設定手段によって設定された通過予測情報を変更する通過予測情報変更手段と、通過予測情報に基づいて、自車とターゲットとの衝突可能性を推定する衝突可能性推定手段とを備える。
(もっと読む)
物体検出装置、物体検出装置を備えた車両の安全システム
【課題】上下方向の分解能が所定レベルに満たないレーダによって検出された静止物体が車両の走行にとっての障害物であるか否かを精度良く判定可能な物体検出装置を提供する。
【解決手段】レーダ部10と、レーダ部10により自車両の前方に存在する絶対速度が所定値未満の物体を静止物体として検出する静止物体検出部20と、自車両の前方に存在する絶対速度が所定値以上の物体を移動物体として検出する移動物体検出部30と、静止物体の検出位置の周囲に、その範囲に存在する移動物体は該静止物体に衝突することを回避不可能又は該静止物体に既に衝突したと推定できるように定められる所定の探索範囲を設定する設定部40と、移動物体の検出結果のうちに検出位置が前記探索範囲に入る検出結果が存在する場合、前記検出された静止物体は自車両の走行にとって障害とならない非障害物であると判定する判定部50と、を備える。
(もっと読む)
車両内の運転者支援システムのためのセンサ構成
本発明は、レーダセンサ(10)とビデオカメラ(14)とを備えた、車両内の運転者支援システムのためのセンサ構成であって、レーダセンサ(10)及びビデオカメラ(14)が共通のハウジングに組み込まれる、上記センサ構成に関する。 (もっと読む)
車両用外界認識装置、および、車両システム
【課題】複数の物体が互いに近接している場合でも、これらの物体を高精度で個体認識すること。
【解決手段】車両用外界認識装置100の衝突判定部4は、物体群の左端位置、中心位置、右端位置それぞれについて、両端横速度計算部3で計算される各位置における各横速度をもとに、相対座標系における物体群の移動軌跡を計算し、その移動軌跡が相対座標系における原点に近づくほど各位置における危険度が高いものとして、各位置における危険度を計算し、衝突回避制御部5は、衝突判定部4により計算される物体群の各位置における危険度のうち、少なくとも1つの位置における危険度が所定しきい値を超えるときに、その危険度に対応する物体群に関する衝突回避制御を実行する。
(もっと読む)
レーダー装置
【課題】後段に接続されるシステムにとって不要な対象物と必要な対象物とを確実に判断することのできるレーダー装置を提供する。
【解決手段】測定範囲内に存在する対象物毎の相対速度、相対距離及び上下角度を測定し、相対距離が予め定めた距離閾値以下、且つ、相対速度が予め定めた速度閾値以下である対象物の上下角度を目標上下角度として設定する。そして、設定した目標上下角度と測定範囲内に存在する対象物の上下角度との相関値が基準値以下である対象物を必要対象物と判断し、当該相関値が基準値を越える対象物を不要対象物として判断する。
(もっと読む)
検出装置および方法、並びにプログラム
【課題】プリクラッシュ安全装置用のレーダと、車線変更支援装置用のレーダとを共用できるようにする。
【解決手段】送信部11のアンテナ36は、第1の方向で、かつ第1の距離近傍の第1の範囲と、第2の方向で、かつ第2の距離近傍の第2の範囲とを含む範囲に電波を照射することにより送信信号を送信し、受信部12は、送信信号としての電波のうち、反射されてくる電波を受信して、受信した電波より受信信号を生成し、衝突予備動作用信号処理部13は、受信信号を、第1の所定時間の間でサンプリングして、物体を検出し、検出結果に応じ衝突予備動作制御部14を制御して衝突に備える動作を実行させ、車線変更警告用信号処理部15は、受信信号を、第1より長い第2の所定時間の間でサンプリングして、物体を検出し、検出結果に応じ車線変更警告動作制御部16を制御して、車線変更の危険を警告させる。本発明は、車両安全装置に適用することができる。
(もっと読む)
車両の物体検知装置
【課題】 自車とすれ違う対向車の前端が自車の物体検知手段の検知領域から外れても、その物体の位置や大きさを的確に求める。
【解決手段】 統合手段が統合範囲TE1内に検知された複数の物体候補T1,T2を一つの目標物体OB1として統合すると、統合情報記憶手段が目標物体OB1と該目標物体OB1を構成する前記物体候補T1,T2との相対位置を記憶する。物体候補位置算出手段が所定時間後における前記物体候補T1,T2の自車に対する位置を算出し、検知領域外判定手段が前記物体候補T1,T2の少なくとも一つT1が検知領域を外れたと判定すると、目標物体位置取得手段が統合情報記憶手段に記憶されている検知領域外と判定されなかった物体候補T2および目標物体OB1の情報に基づいて、新たな目標物体OB1の位置または大きさを求めるので、複数の物体候補T1,T2の一部が検知領域を外れても、目標物体OB1の位置または大きさを精度良く検知することができる。
(もっと読む)
到来方向推定装置、到来方向推定方法および到来方向推定プログラム
【課題】到来方向の推定を高速かつ高精度に行うこと。
【解決手段】N個のセンサが受信した目標からの到来信号より、v1〜vNで表されるN個のベースバンド信号ベクトルを生成する信号ベクトル生成手段と、1≦MかつM≦(N−1)/2なる自然数Mを行の次元として優先的に定め、前記信号ベクトルの部分ベクトルv1〜vN−1から、(N−M)×M次の行列Rf1、Rf2、Rb1およびRb2のうち、少なくとも1つの行列を生成するHankel行列生成手段と、前記行列Rf1、Rf2、Rb1およびRb2のうち少なくとも1つの行列を用いて行列Rを生成し、前記行列RをR=[R1⊥R2]Tによって2つの部分行列R1およびR2に分割し、前記部分行列R1とR2とから前記到来信号の到来方向を推定する推定手段と、を具備する到来方向推定装置、方法およびプログラムである。
(もっと読む)
レーダー装置
【課題】車両に搭載されるレーダー装置に必要とされる性能を満たしながら、短時間で測定を完了することができるレーダー装置を提供する。
【解決手段】制御処理部は、第1の測定方式による測定を開始し、対象物が測定範囲内に存在するとき、対象物との相対位置及び相対速度を測定する。そして、制御処理部は、第1の測定方式によって測定した対象物の相対位置に基づいて再測定範囲を決定する。制御処理部は、再測定範囲を決定すると、再測定範囲のみを第1の測定方式よりも分解能の高い第2の測定方式で測定する。
(もっと読む)
レーダー装置
【課題】低い演算負荷で測定範囲の対象物との相対速度や相対距離などを測定することができるレーダー装置を提供する。
【解決手段】測定範囲内に存在する対象物で反射した反射波のレベルを予め定めた閾値と比較する。そして、予め定めた閾値以上となる反射波のみに基づいて対象物との相対距離として測定し、当該反射波をフーリエ変換処理することによってドップラー周波数を算出し、算出したドップラー周波数に基づいて対象物との相対速度を算出する。
(もっと読む)
物体検出装置および物体検出方法
【課題】静止物体および移動物体についての座標算出を高精度に行うこと。
【解決手段】画像検知部が、車両に搭載されたカメラによって時系列に撮像された2つの画像を対比することによって静止物体の相対的な空間配置をあらわす相対3次元座標を取得し、レーダ検知部が、画像に対応する範囲について照射した照射波に係る反射波に基づいて静止物体および移動物体に係る距離および方位を取得し、物体座標認識部が、取得された方位に存在する前記画像内の静止物体について取得された距離を用いて相対3次元座標から絶対3次元座標を算出するように物体検出装置を構成する。
(もっと読む)
物体検出装置、物体検出方法および物体検出システム
【課題】歩行者のような弱反射物体であっても最初のレーダ探索で検出すること。
【解決手段】物体種別判定部が、車両に搭載されたカメラによって撮像された画像に基づいて物体の種別を判定し、閾値選択部が、判定された種別に対応付けられた所定の閾値を選択し、画像に対応する範囲について照射した照射波に係る反射波の強度が選択された閾値以上であることを条件として物体を検知するように、物体検出装置あるいは物体検出システムを構成する。
(もっと読む)
物体検出装置および方法、ならびに物体検出装置を備えた車両
【課題】電磁波によってその物体を検出した時点におけるその物体の移動速度および移動方向を求める。
【解決手段】電磁波を送信し物体から反射される電磁波を異なる位置で受信するレーダヘッド201,202と、レーダヘッド201,202から出力される受信信号より少なくとも物体の相対速度および方位を求めるレーダ信号処理部311,312とを有する複数のレーダ装置と、その複数のレーダ装置によって求められる物体の相対速度および方位を用いて、その物体の移動ベクトルを算出する移動ベクトル検出部402とを備える。
(もっと読む)
干渉評価方法、装置、およびプログラム
【課題】現実として起こりうる状況下においても安全性の確保を図ることができる干渉評価方法、装置、およびプログラムを提供する。
【解決手段】複数の物体の位置と各物体の速度を含む内部状態とを少なくとも記憶する記憶手段を備えたコンピュータが、前記複数の物体の位置および内部状態を前記記憶手段から読み出し、この読み出した前記物体の位置および内部状態に基づいて、前記複数の物体の各々が時間の経過とともに取りうる位置の変化を時間および空間から構成される時空間上での軌跡としてそれぞれ生成し、この生成した軌跡を用いることによって前記複数の物体の進路の確率的な予測をそれぞれ行い、この予測した結果に基づいて、前記時空間上で前記特定の物体が取りうる軌跡と前記その他の物体が取りうる軌跡との干渉の程度を定量的に示す干渉度を算出する。
(もっと読む)
船舶用目標追尾装置
【課題】自船の方位データに異常が発生しているか否かを知ることができる船舶用目標追尾装置を提供する。
【解決手段】Association判定部3は、目標追尾部2から出力された目標船のデータ(レーダ追尾目標データ)と、AIS処理部4から出力された他船のデータ(AIS目標データ)とを比較し、同一目標船と判定されたデータを分散判定部5へ出力する。分散判定部5は、レーダ追尾目標データに含まれる目標船の方位データと、AIS目標データに含まれる目標船の方位データとの差に基づく指標値を計算し、その指標値に基づいて、レーダ追尾目標データに含まれる方位データに異常が発生しているか否かを判定する。
(もっと読む)
レーダー装置
本発明は、高周波回路とアンテナを備え、地面に対する速度を測定するためのレーダー装置(1)に関する。高周波回路は高周波チップ(7)として構成されており、該高周波チップは複数のアンテナ出力端(42)を有し、該アンテナ出力端はアンテナ線路(13)を介してホーン形アンテナ(28)と接続されている。 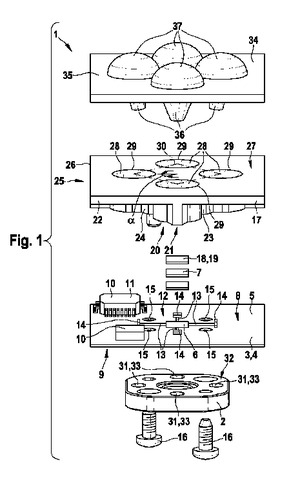 (もっと読む)
(もっと読む)
レーダ装置、及び干渉防止方法
【課題】電波干渉を十分軽減したレーダ装置、及び干渉防止方法を提供すること。
【解決手段】レーダ装置10、20は、目標物に対して送信電波を送信しその反射波を受信して目標物を検出する。通信装置30は他車に搭載されたレーダ装置に関するレーダ装置情報と走行情報を受信する。通信装置30は受信したレーダ装置情報等に基づいて、自車と他車とが近接する場合等、一定の送信電波停止条件を満たすときに、レーダ装置10、20から送信電波の送信を停止させる。また、通信装置30は送信電波を停止後、自車と他車とが近接しなくなった場合等、一定の送信電波再開条件を満たすとき送信電波の送信を再開させる。
(もっと読む)
車両用レーダ装置の軸ずれ検出装置および方法
【課題】 被検出物体18,19との間の距離を検出するために放射するビームを、鉛直軸線6まわりにほぼ水平面内で、予め定める軸線7の左右両側にわたって走査偏向し、前記予め定める軸線7と、車両の直線走行の軸線21との軸ずれ角θを正確に検出する。
【解決手段】 車両13にレーダ手段25を装着し、駆動手段5によってレーダ手段25からのビームが走査するように角変位駆動し、反射ビームを受信する。車両13が直線道路の左走行レーン16を走行中、左方の路側に設けられた直線状ガードレール18を、前記予め定める軸線7の左側方で、走査角度φが異なる複数回、検出し、これらの複数の各検出位置を結ぶ仮想直線yLa,yRaを演算して求め、その傾きkに対応する軸ずれ角θを演算して求める。
(もっと読む)
1 - 20 / 34
[ Back to top ]