
車両用レーダ装置の軸ずれ検出装置および方法
【課題】 被検出物体18,19との間の距離を検出するために放射するビームを、鉛直軸線6まわりにほぼ水平面内で、予め定める軸線7の左右両側にわたって走査偏向し、前記予め定める軸線7と、車両の直線走行の軸線21との軸ずれ角θを正確に検出する。
【解決手段】 車両13にレーダ手段25を装着し、駆動手段5によってレーダ手段25からのビームが走査するように角変位駆動し、反射ビームを受信する。車両13が直線道路の左走行レーン16を走行中、左方の路側に設けられた直線状ガードレール18を、前記予め定める軸線7の左側方で、走査角度φが異なる複数回、検出し、これらの複数の各検出位置を結ぶ仮想直線yLa,yRaを演算して求め、その傾きkに対応する軸ずれ角θを演算して求める。
【解決手段】 車両13にレーダ手段25を装着し、駆動手段5によってレーダ手段25からのビームが走査するように角変位駆動し、反射ビームを受信する。車両13が直線道路の左走行レーン16を走行中、左方の路側に設けられた直線状ガードレール18を、前記予め定める軸線7の左側方で、走査角度φが異なる複数回、検出し、これらの複数の各検出位置を結ぶ仮想直線yLa,yRaを演算して求め、その傾きkに対応する軸ずれ角θを演算して求める。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両用レーダ装置の軸ずれ検出装置に関し、特に、たとえば自動車などの車両に搭載され、ミリ波帯の高周波信号ビームまたはレーザビームなどのビームを、ほぼ水平面内で、ほぼ鉛直な縦の軸線まわりに角変位して走査し、被検出物体までの距離を計測する車両用レーダ装置の軸ずれ検出装置に関する。
【背景技術】
【0002】
このようないわば走査形の車両用レーザ装置では、車両の直線走行方向の軸線に関して、ビームを走査する角度φが正確に検出されていなければならない。さもなければ、計測した距離とビームの走査の中心である前記縦の軸線まわりの角度φとに対応した被検出物体の位置を正確に検出することができない。したがって、車両の直線走行方向の軸線に関するビーム角度φを正確に検出することができなくなった軸ずれの状態では、被検出物体の位置の誤検出が生じる。したがって軸ずれが生じないように補正または調整する必要がある。レーダ装置が車両に装着された状態において、振動によって、または経年変化などによって、レーダ装置の車両への装着状態が変化し、軸ずれを生じるおそれがある。
【0003】
従来から、このような軸ずれの検出を、常時、特に車両の走行中においても、容易に行うことができる構成は、提案されていない。
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明の目的は、車両の直線走行方向の軸線に関して、走査されるビームの角度φの軸ずれを、車両の走行中においても、容易に検出する車両用レーダ装置の軸ずれ検出装置および方法を提供することである。
【課題を解決するための手段】
【0005】
本発明(1)は、車両に設けられ、前方に向けてビームを放射し、被検出物体による反射ビームを受信して、被検出物体との間の距離を検出するレーダ手段と、
レーダ手段を縦の角変位軸線まわりに、予め定める角変位範囲8内で、かつ、その角変位範囲内のビーム放射方向の予め定める軸線7の少なくとも両側にわたって、角変位駆動する駆動手段と、
レーダ手段の駆動手段による角度を検出する角度検出手段とを含み、
レーダ手段は、角変位範囲内の前記両側で、距離をそれぞれ検出する車両用レーダ装置の軸ずれ検出装置において、
左右の同一距離に対応する角度検出手段による検出角度φL,φRの差θsを演算する角度差演算手段とを含むことを特徴とする車両用レーダ装置の軸ずれ検出装置である。
【0006】
また本発明(2)は、車両に設けられ、前方に向けてビームを放射し、被検出物体による反射ビームを受信して、被検出物体との間の距離を、縦の角変位軸線まわりで、予め定める角変位範囲8内のビーム放射方向の予め定める軸線7の少なくとも両側でそれぞれ検出するレーダ装置の軸ずれ検出方法において、
レーダ装置を縦の角変位軸線まわりに、予め定める角変位範囲8内で、かつ、その角変位範囲内のビーム放射方向の予め定める軸線7の少なくとも両側にわたって、角変位駆動し、
レーダ装置の角変位駆動による角度φを検出し、
角度を検出することによって得られる左右の同一距離に対応する検出角度φL,φRの差θsを演算することを特徴とする車両用レーダ装置の軸ずれ検出方法である。
【0007】
本発明(1),(2)に従えば、図11〜図13に関連して後述されるように、車両に設けられるレーダ手段を、たとえば鉛直である縦の軸線6まわりに角変位してビームをたとえば水平面内で走査偏向し、その走査が行われる角変位範囲内で、ビーム放射方向の予め定める軸線7に関して左右両側で少なくとも1回、たとえば複数回、被検出物体との間の距離をそれぞれ検出する。左右の同一距離に対応した角度φL,φRの差θsを角度差演算手段によって演算して求める。これによって軸ずれ角θ(=θs/2)を検出することができる。
【発明の効果】
【0008】
本発明(1),(2)によれば、ビーム放射方向の予め定める軸線7に関して左右両側で少なくとも1回、すなわち左側少なくとも1回および右側で少なくとも1回、被検出物体との間の距離を検出し、その距離に対応する角度検出手段の出力によって表される角度を求め、こうして左右の同一距離に対応した角度φL,φRの差θsを演算して求めることによって、軸ずれ角θを検出することができるようになる。
【発明を実施するための最良の形態】
【0009】
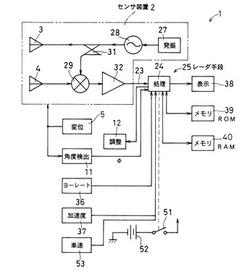
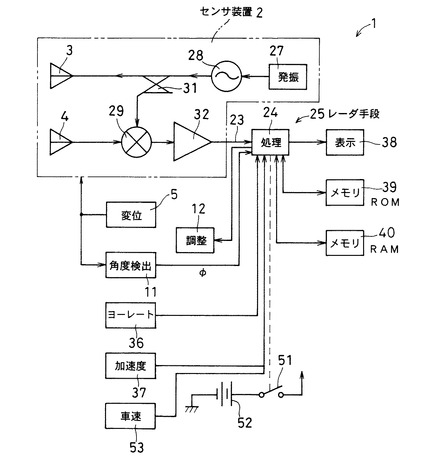
図1は、本発明の実施の一形態の全体の電気的構成を示すブロック図である。走査形FM−CW(Frequency Modulation-Continuous Wave)レーダ装置1のセンサ装置2は、自動車などの車両に搭載され、送信アンテナ3によって車両の前方にミリ波帯の高周波信号のビームまたはレーザビームなどのビームが、放射される。被検出物体による反射ビームは、受信アンテナ4によって受信される。このセンサ装置2は、駆動手段5に連結される。
【0010】
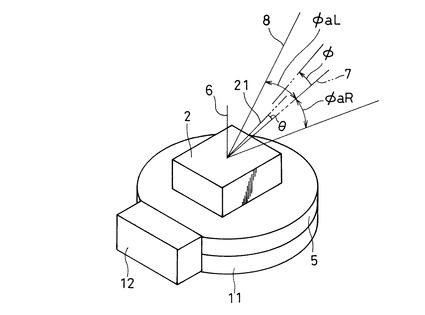
図2は、センサ装置2,駆動手段5、およびその付近の構成を示す簡略化した斜視図である。センサ装置2では、ほぼ鉛直の縦の角変位軸線6まわりに、ビーム放射方向の予め定める軸線7の左右の少なくとも一方側(この実施の形態では左右両側)にわたって、最大角度φaL,φaRの角変位範囲内で角変位駆動する。たとえばφaL=φaR=5度であってもよい。この予め定める軸線7に関する左右の最大角度φaL,φaRにわたる角変位範囲は、参照符8で示される。センサ装置2の駆動手段5による前記角変位範囲8内の前記軸線7に関する角度φiは、角度検出手段11によって検出される。この角度検出手段11は、たとえばポテンシオメータなどによって実現されてもよい。角変位範囲8は、縦の軸線6に垂直なほぼ水平面内に存在する。
【0011】
センサ装置2と駆動手段5と角度検出手段11などとは、一体的に、調整手段12を介して車両の車体に取付けられる。調整手段12は、電気信号によって、センサ装置2と駆動手段5と角度検出手段11などとの車両に取付ける姿勢を調整することができ、たとえば水平面内で角変位して調整する。調整手段12は、作業者の手動によって取付け姿勢が変化して調整されるように構成されてもよい。
【0012】
図3は、自動車である車両13が直線道路14を走行している状態を示す平面図である。道路14は、白線などの中央線15の左右に走行レーン16,17を有する。各走行レーン16,17に沿って、路側には静止物体である水平に延びるガードレール18,19が設置される。センサ装置2が軸ずれを生じていない状態における角変位範囲は、参照符8aで示され、右方に軸ずれを生じている状態は参照符8bで示される。
【0013】
軸ずれというのは、角変位範囲8内のビーム放射方向の前記予め定める軸線7が、車両13の直線走行方向の軸線21と成す軸ずれ角θが零でない状態をいう。すなわち角度検出手段11が、たとえばポテンシオメータによって実現される構成において、検出角度φに対応する出力電圧が1次直線で表されるとき、ビーム放射方向の前記軸線7の角度に対応する電圧V7と、車両13の前記軸線21に対応する電圧V21とが一致しないとき、その電圧の差ΔV(=V7−V21)に対応する軸ずれ角θが発生していることになる。したがって角度検出手段11の出力電圧Vを、(V+ΔV)に演算し直して補正することによって、角度検出手段11の出力からビームの放射されている実際の角度φを正確に検出することができるようになる。このような軸ずれが生じている状態では、車両13の前方に存在する他の車両およびガードレール18,19などの距離および角度検出手段11による角度によって演算される車両13との相対的な検出位置を正確に得ることができなくなる。本発明では、この軸ずれ角θを正確に自動的に検出することができるようになり、この軸ずれ角θが零となるように、角度検出手段11による検出角度φが補正され、または調整手段12が動作する。たとえば前記軸線7に対応する角度検出手段11の検出角度φが、車両13の前記軸線21に関して、誤差である右に正または左に負の軸ずれ角θを生じているとき、角度検出手段11によって検出される角度φを、(φ+θ)に補正する。
【0014】
センサ装置2からライン23に導出される出力は、マイクロコンピュータなどによって実現される処理回路24に与えられ、これによってFM−CWレーダ方式によって、距離と相対速度とが計測される。センサ装置2と処理回路24とは、レーダ手段25を構成する。
【0015】
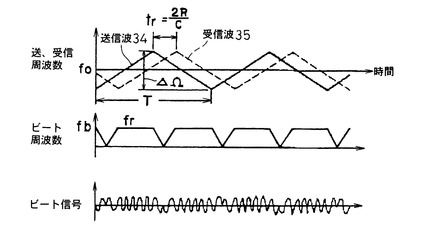
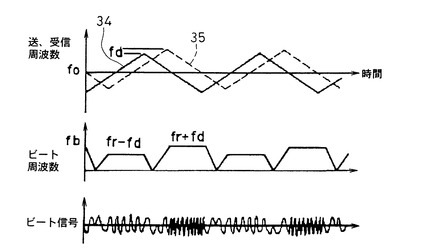
図4は、図1に示されるレーダ手段25によって被検出物体との間の距離を求める動作を説明するための波形図である。図5は、図1に示されるレーダ手段25によって被検出物体との相対速度を求める動作を説明するための波形図である。これらの図面を参照して、レーダ手段25のセンサ装置2において、変調信号発生器27は、たとえば750Hzの周波数を有する三角波を発生し、発振器28が出力するミリ波帯の高周波である搬送波信号を、周波数変調(略称FM)され、その結果得られるFM変調された送信信号34は、送信アンテナ3から被検出物体に向けて放射される。被検出物体による反射ビームの受信波35は、受信アンテナ4によって受信され、混合器29に与えられる。この混合器29にはまた、発振器28からの高周波信号が方向性結合器31を経て、与えられる。混合器29からのビート周波数fbを有するビート信号は、増幅器32によって増幅され、前述のライン23を介して処理回路24に与えられる。受信アンテナ4によって受信される被検出物体からの反射ビームの受信アンテナ4による受信波35は、センサ装置2と被検出物体との間の距離に対応する距離周波数frが変化し、また図5に示されるように被検出物体との相対速度に対応する速度周波数fdが変化する。混合器29から導出されるビート信号のビート周波数fbは、式1で示される。
fb = fr±fd …(1)
【0016】
変調信号発生回路27からの変調信号の変調幅をΔΩとし、変調波周期をTとし、cを光速とし、Rをセンサ装置2と被検出物体との間の距離とし、vを被検出物体との相対速度とし、f0を、搬送波を発生する発振器28の送信中心周波数とするとき、式2および式3が成立する。
fr = 4・ΔΩ・T・R/c …(2)
fd = 2・f0・v/c …(3)
【0017】
したがって、FM−CWレーダ方式において、処理回路24は、式2および式3に基づき、周波数fr,fdを求めることによって、距離Rおよび相対速度vを演算して計測する。
【0018】
処理回路24にはまた、角度検出手段11からの出力が与えられ、さらにヨーレートセンサ36と加速度センサ37の出力が与えられる。処理回路24による演算結果は、陰極線管または液晶などの表示手段38に表示される。処理回路24には、メモリ39,40が接続される。メモリ39は、書込み可能な不揮発性メモリであって、たとえばEEPROM(Electrically Erasable Programmable Read only Memory)などによって実現することができる。メモリ40は、たと
えばランダムアクセスメモリによって実現される。
【0019】
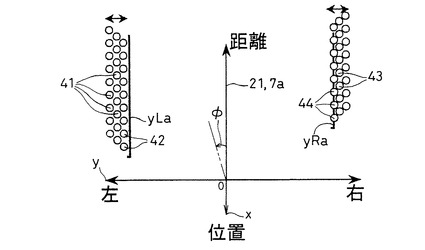
図6は、レーダ手段25のセンサ装置2が軸ずれを生じていないときにおける表示手段38による表示状態を示す図である。センサ装置2によるビーム放射方向の前記予め定める軸線7は、車両13の直線走行方向の軸線21に、一致し、または平行である。車両13が前述の図3に示されるように左走行レーン16を直線走行中、ビームが角変位範囲8aの前記軸線7aに関して一方側、すなわち左側で、複数回、距離Riを検出し、またこのとき、角度検出手段11によって前記軸線7aに関する角度φiが検出され、こうして左ガードレール18の各検出位置41の座標(Ri,φi)が得られる。このような複数の検出位置41のうち、たとえば最小二乗法の手法によって、角度検出手段11による同一角度φの計測距離Rのうち最小値である検出位置42を結ぶ仮想直線yLaを演算して求める。この仮想直線yLaは、車両13の軸線21をx軸とし、そのx軸に直交する車両13の左右幅方向をy軸とする2次元平面内で得られる。この走行中、または車両13が右走行レーン17を前述と同一方向に直線走行中、右ガードレール19が前述と同様にして検出されるとき、その検出位置43が得られ、それらの検出位置43のうち、各角度の最小の検出位置44を結ぶ仮想直線yRaを得ることもまた、可能である。図6では、仮想直線yLa,yRaは、x軸に平行であり、その傾きk(後述の式4を参照)は、零であり、軸ずれ角θ=0である。
【0020】
本件明細書の説明における参照符に含まれる添え字a,b,Lは、省略されて総括的に示すことがある。
【0021】
図7は、レーダ手段25のセンサ装置2によるビーム放射方向の前記軸線7bが、車両13の軸線21に関して軸ずれを生じたときにおける表示手段38の表示状態を示す図である。ビーム放射方向の軸線7bは、図7において車両13の軸線21に関して右方に、零でない軸ずれ角θだけずれている。車両13が図3の左走行レーン16を直線走行中、左ガードレール18の検出位置45が得られ、これによって角度検出手段11によって検出される複数の各角度毎の最小の計測距離の検出位置46を結ぶ仮想直線yLbが、前述と同様にたとえば最小二乗法の手法によって得られる。これによって前述と同様な2次元画面において、軸ずれ角θを得ることができる。また同様に右走行レーン17の右ガードレール19の検出位置47のうち最小距離の検出位置48から、仮想直線yRbが得られ、軸ずれ角θが得られる。
【0022】
処理回路24によって得られる図6の仮想直線yLa,yRaと、図7の仮想直線yLb,yRbとを、総括的に参照符yで表すとき、その1次直線の式は、次のように表される。
y = kx+r …(4)
【0023】
この仮想直線yの傾きkは、軸ずれ角θに対応する。
θ = tan-1k …(5)
【0024】
処理回路24は、センサ装置2および角度検出手段11の各出力に応答して、図6および図7に関連して前述したように、車両13の軸線21であるx軸と、そのx軸に直交する車両13の左右方向のy軸とから成る2次元平面内で、ビーム放射方向の前記軸線7に関して少なくとも一方側、たとえば左方にわたる角変位範囲θaL内で、複数回、距離を検出し、角度検出手段11によって検出される検出角度φiが相互に異なる複数の検出位置42,46を結ぶ仮想直線yLa,yLbを演算し、その傾きkによって、軸ずれ角θを演算して求めることができる。右ガードレール19が検出されるときにもまた、同様にして仮想直線yRa,yRbが前述のように得られ、このときにもまた、軸ずれ角θを演算して求めることができる。
【0025】
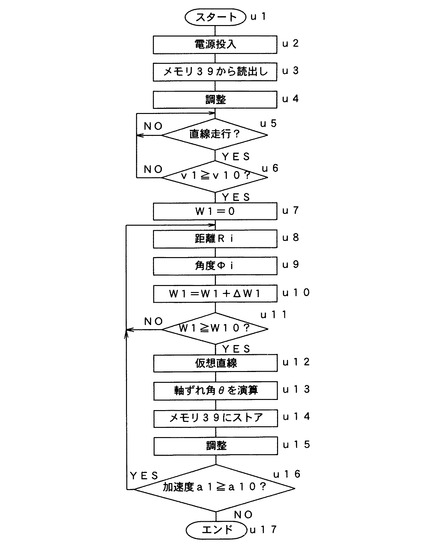
図8は、処理回路24による軸ずれ角θを演算する具体的な動作を説明するためのフローチャートである。ステップu1からステップu2に移り、図1に示される電源スイッチ51が投入されたことが処理回路24によって判断されると、ステップu3では、書込み可能な不揮発性メモリ39から、予めストアされている軸ずれ角θを読出す。ステップu4では、この読出された軸ずれ角θに対応する電気信号が処理回路24から調整手段12に与えられ、軸ずれ角θが零となるように、センサ装置2、駆動手段5および角度検出手段11が、角変位調整される。実施の他の形態では、メモリ39から読出された軸ずれ角θを用いて、角度検出手段11による検出角度φを補正するようにしてもよい。メモリ39には、後述のステップu14に関連して説明されるように、電源スイッチ31の遮断直前に検出された最後の軸ずれ角θがストアされる。電源スイッチ51は、車両13の内燃機関のための点火回路の電源52に関連して設けられたアクセサリスイッチであってもよい。
【0026】
ステップu5では、ヨーレートセンサ36の出力によって車両13が直線走行しているかどうかを判断する。直線走行しているとき、次のステップu6に移る。ステップu6では、車速センサ53によって検出される車両13の走行速度v1が、予め定める値v10以上であるか(v1≧v10)が判断される。この予め定める値v10は、たとえば60km/hであってもよい。こうして車両13が予め定める値v10以上の速度で走行中に、軸ずれ角θが検出される。これによって車両13の軸線21と、センサ装置2によるビームの角変位範囲8内における前記予め定める軸線7とを、実際の走行中に正確に一致することができ、軸ずれ角θを確実に零とすることができるようになる。
【0027】
ステップu7では、タイマW1を零とし、次のステップu8では、センサ装置2の働きによって被検出物体までの距離Riを演算して求める。ステップu9ではこの距離Riが得られるときにおける角度検出手段11によって検出される角度φiが得られる。ステップu10では、タイマW1を時間ΔW1だけインクリメントする。タイマW1の計測時間を同一の参照符で表すとき、ステップu11では、タイマW1の時間が予め定める時間W10以上であるか(W1≧W10)が判断される。W10は、たとえば6秒などであってもよく。距離Riと角度θiとの計測サンプリング時間間隔ΔW1は、たとえば6msecであってもよい。こうして得られた距離Riと角度θiとによって、前述の2次元平面内で、u12では、仮想直線yが前述の式4から、たとえば2分毎に求められる。ステップu13では、仮想直線yの傾きkから、前述の式5によって軸ずれ角θが得られる。こうして得られた軸ずれ角θは、ステップu14によってメモリ39に書込まれる。ステップu15では調整手段12が動作され、前述のステップu13で得られた軸ずれ角θが零となるように、制御される。
【0028】
ステップu16では、加速度センサ37によって検出される車両13の走行方向に沿う加速度a1に応答し、その検出された加速度a1が、予め定める値a10以上であるか(a1≧a10)を判断し、加速度が大きいとき、軸ずれが生じている可能性が大きく、そのような加速度が大きいとき、再びステップa8に戻る。本発明の実施の他の形態では、ステップu7〜ステップu15を、常時連続して繰返し行うように構成してもよい。
【0029】
車両13が前述のステップu5において直線走行状態であるかどうかは、上述の実施の形態では車両13の鉛直軸線まわりの旋回を検出するヨーレートセンサ36の出力によって行われたけれども、本発明の実施の他の形態では、(1)車両13の運転者が走査する操舵輪の角度または操舵角をセンサによって検出するようにしてもよく、または(2)車両13に搭載されて前方の景色を撮像するテレビカメラを備え、撮像された画像を処理して直線走行を検出する構成としてもよく、さらにまた(3)車両13の走行位置を検出するGPS(Global Positionning System)装置によって道路地図データと対応し、直線走行を検出する構成であってもよく、(4)そのほかの構成によって直線走行を検出するようにしてもよい。
【0030】
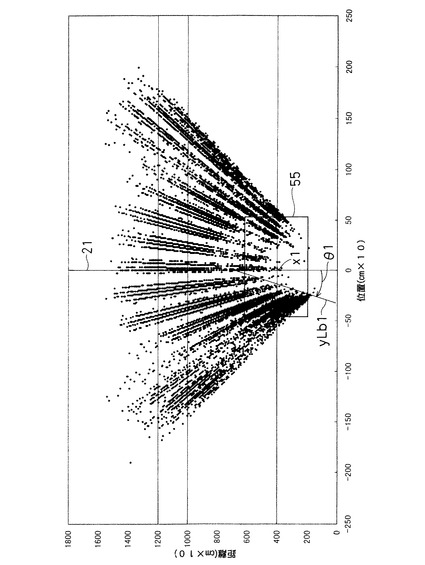
図9は、本件発明者による実験結果を示す図である。図9の実験結果は、前述の図7に対応する。本件発明者は図1〜図8に示される前述の実施例によって、同一走行方向の左右各1車線の道路14の左走行レーン16を直線走行することによって、図9に示される黒点で表される検出位置を得ることができた。図9において仮想直線yLb1を、最小二乗法によって得ることができ、その傾きkに対応した軸ずれ角θ1を求めることができた。図9では、この軸ずれ角θ1は、たとえば0.1度未満であって比較的小さい値であり、調整手段12によって軸ずれのための補正動作を行わなくてもよい。軸ずれ調整を調整手段12によって行うかどうかの判断は、仮想直線yLb1が、車両13の直線走行時の軸線21であるx軸上の予め定める位置x1以上(図9の位置x1よりも上方)で交差するかどうかの判断を行うことによって達成することができ、仮想直線yLb1が、x軸と前記位置x1以上で交差するとき、軸ずれ角θ1が、小さい値であって、調整手段12による軸ずれ補正を行う必要がないものと判断することができる。仮想直線yLb1が、X軸と位置x1未満(図9の下方)でX軸と交差するとき、軸ずれ角θ1が大きく、したがって調整手段12による調整動作が必要なものと判断し、調整動作を行うように構成することができる。
【0031】
図9において仮想直線yLb1を演算して求めるにあたり、その演算処理量をできるだけ小さくするために、図9に示される2次元平面内で、前記位置x1を含む領域55を設定し、この領域55内に存在する検出位置のみを用いて仮想直線yLb1の演算を行うようにしてもよい。これによって処理回路24による演算処理量をできるだけ少なくし、仮想直線yLb1を迅速に求めることができる。
【0032】
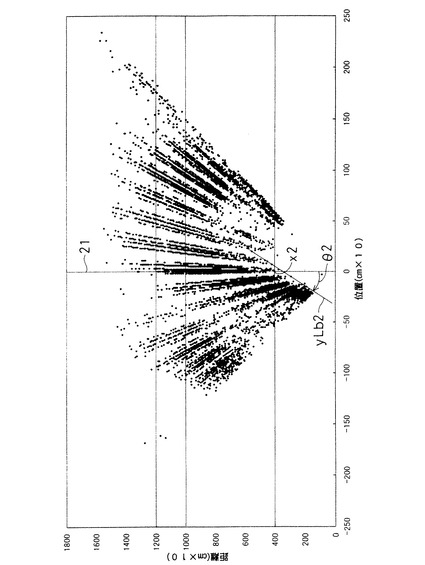
図10は、本件発明者による他の実験結果を示す図である。演算によって得られた仮想直線yLb2は、車両13の軸線21であるx軸と、位置x1未満の範囲で交差し、したがってその軸ずれ角θ2が比較的大きく、調整手段12による軸ずれ調整動作が行われる。そのほかの実験の条件は、前述の図9に関連して述べた実験と同様である。軸ずれ角θ2は、図10の実験では、2度である。
【0033】
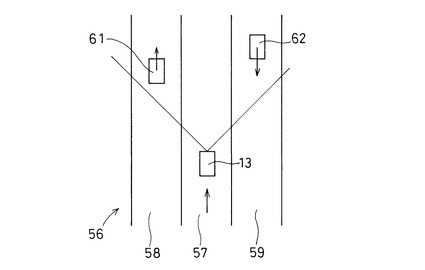
図11は、本発明の実施の他の形態における直線道路56を車両13が直線走行している状態を示す簡略化した平面図である。車両13が走行している走行レーン57の左右両側に、走行レーン58,59が存在し、したがってこの道路では、同一走行方向に、少なくとも合計3車線以上存在する。走行レーン58,59には、車両61,62が同一方向に走行している。車両13には、前述の図1〜図10に関連して述べた実施の形態における車両用レーダ装置の軸ずれ検出装置が搭載されている。この実施の形態では、車両13が走行レーン57を直線走行しているとき、左右の走行レーン58,59を走行する他の車両61,62を検出することによって、軸ずれ角θを検出することができる。このような左右の走行レーン58,59を走行している車両61,62は、車両13とはその走行速度が異なり、したがって複数回にわたって、車両13に搭載されたレーダ装置を用いて車両61,62を検出して、前述の実施の形態における、左右のガードレール18,19と同様な被検出物体として扱い、軸ずれ角θを演算して求めることができる。この実施の形態は、前述の実施の形態と類似する構成を有し、同一の参照符を用いて説明する。
【0034】
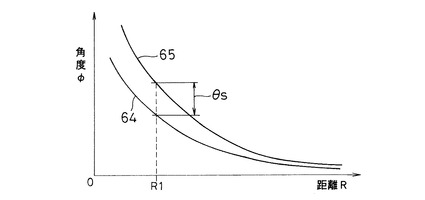
図12は、図11に示される本発明の実施の形態において、処理回路24の演算結果が表示手段28の2次元表示画面に表示された状態を示す図である。センサ装置2と角度検出手段11との出力によって処理回路24は、被検出物体である車両61,62までの距離Rと、角度検出手段11による検出角度φとの関係を示す図である。道路56の車両13が直線走行している走行レーン57に関して左方の走行レーン58を走行する車両61を検出することによって、ライン64が得られ、また右方のレーン59を走行する車両62を検出することによってライン65が得られる。各レーン58,59には、予め定める時間、たとえば20分間に、複数の車両61,62が走行し、車両13の速度と車両61の速度とは前述のようになっている。車両13に搭載されている軸ずれ検出装置における処理回路24が、レーン58,59を走行中の時間経過に伴って異なる車両61,62を前記予め定める時間中検出することによって、図12に示される各ライン64,65の実験結果が得られる。各ライン64,65は、予め定める距離R1において角度L,φRの差θs(=φL−φR)が存在する。この角度差θsは、前述の軸ずれ角θに対応する(θ=θs/2)。
【0035】
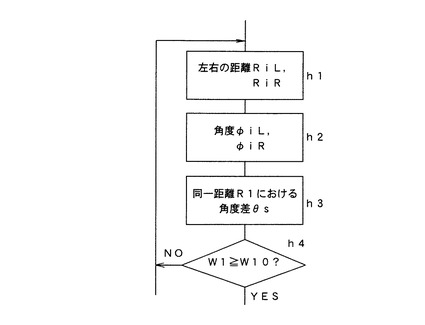
図13は、図11および図12に示される実施の形態における処理回路24の一部の動作を説明するためのフローチャートである。この図13のステップh1〜ステップh4は、図8のステップu8〜ステップu13に代えて、実行される。ステップh1では、車両13の前方に、前述の実施の形態と同様に、ビームを放射操作し、その反射ビームを受信することによって、車両13の走行しているレーン57の両側の各レーン58,59を走行している各車両61,62までの距離RiL,RiRを演算して求める。ステップh2では、これらの各距離RiL,RiRが得られるときにおける角度検出手段11によって検出された角度φiL,φiRをそれぞれ求める。こうして得られた左右の各距離と角度との複数の組合せデータ(RiL,φiL)、(RiR,φiR)を、予め定める時間W10にわたってメモリ40にストアする。こうして前述の図12に示される距離Rと角度φとに対応するライン64,65が得られる。
【0036】
ステップh3では、予め定める同一の距離R1における角度φiL,φiRの角度差θs(=φiL−φiR)を演算して求める。これによって軸ずれ角θを演算する。ステップh4では、タイマW1の時間が、予め定める時間W10以上になったか(W1≧W10)が判断され、そうであれば図8のステップu14以下の動作が実行される。本発明の実施の他の形態では、車両13が走行する走行レーン58,59のいずれか少なくとも一方では、車両61,62が、車両13とは逆方向に走行していてもよい。さらにまた車両13は停止したままであってもよい。
【0037】
本発明の実施の他の形態では、検出された軸ずれ角θが予め定める値θ11以上であるとき、軸ずれ検出装置の動作を休止する。この値θ11は、たとえば2度以上の値であってもよい。作業者は、軸ずれ角θが異常に大きくなった原因を究明し、修理を行う。
【0038】
センサ装置2からライン23を介して処理回路24に与えられる被検出物体の反射ビームに対応する信号について、処理回路24によってその信号の最大受信レベルの周波数に対応した距離および相対速度を演算するようにしてもよく、またはその受信レベルをレベル弁別し、受信レベルが予め定める値以上であるときにおける信号周波数を演算するようにしてもよい。
【0039】
本発明は、前述のFM−CWレーダ方式だけでなく、そのほかの構成を有するレーダ方式を採用して、非検出物体との距離を計測するレーダ手段に関連して、広範囲に実施することができる。
【0040】
レーダ手段から放射されるビームを角変位して走査するために、レーダ手段を機械的構成によって角変位する構成としてもよく、またはレーダ手段の送信アンテナおよび受信アンテナだけを機械的に角変位する構成であってもよく、さらに送信波および受信波の角度を電気的手法によって角変位してもよく、たとえば送信アンテナおよび受信アンテナとしてフェイズドアレイアンテナを用い、このフェイズドアレイアンテナの各アンテナ素子から放射される電磁波のビームの位相差を変化する構成としてもよい。
【0041】
本発明は、以下の実施の形態が可能である。
(1)車両に設けられ、前方に向けてビームを放射し、被検出物体による反射ビームを受信して、被検出物体との間の距離を検出するレーダ手段と、
レーダ手段を縦の角変位軸線まわりに、予め定める角変位範囲8内で、かつ、その角変位範囲内のビーム放射方向の予め定める軸線7の少なくとも一方側にわたって、角変位駆動する駆動手段と、
レーダ手段の駆動手段による角度φを検出する角度検出手段とを含み、
レーダ手段は、角変位範囲内の前記少なくとも一方側で複数回、距離を検出する車両用レーダ装置の軸ずれ検出装置において、
レーダ手段と角度検出手段との各出力に応答し、前記予め定める軸線の少なくとも一方の側で、被検出物体の検出角度φが相互に異なる複数の各検出位置を結ぶ仮想直線が車両の直線走行方向の軸線と成す軸ずれ角θを演算する軸ずれ角演算手段を含むことを特徴とする車両用レーダ装置の軸ずれ検出装置。
【0042】
図1〜図9に関連して後述されるように、自動車などの車両の車体にレーダ手段が設けられ、このレーダ手段は、ミリ波帯などの高周波信号ビーム、またはレーザビームなどのビームを車両の前方に向けて放射し、被検出物体、たとえば車両の走行方向前方を走行している車両および道路の路側に設置されたガードレールなどによる反射ビームを受信し、これによって被検出物体との間の距離を検出する。レーダ手段は、駆動手段によって、たとえば鉛直の縦の角変位軸線6まわりに予め定める角変位範囲φaL,φaR内で、ビーム放射方向の予め定める軸線7の少なくとも一方側、たとえば左側または右側にわたって、角変位駆動し、こうしてビームをたとえばほぼ水平面内で走査して偏向することができる。レーダ手段の駆動手段による角度は、角度検出手段によって検出される。レーダ手段は、角変位範囲内の少なくとも一方側で複数回、距離を検出する。
【0043】
こうして車両が直線状の道路を走行し、その道路の側方にガードレールが道路に沿って直線状に設置されている状態で、レーダ手段は、ビームの走査位置に、前記一方側で、被検出物体であるガードレールまでの距離を、複数回検出することができる。そこで、得られた前記一方側における検出角度φが相互に異なる複数の各検出位置を結ぶ仮想直線yLa,yRaが、車両の直線走行方向の軸線21と成す軸ずれ角θを演算する。これによって車両の直線走行中、レーダ手段によって検出されるガードレールと車両の直線走行方向の軸線とが平行となって軸ずれ角θが零であって軸ずれを生じていないか、または軸ずれ角θが零でない或る値であって、軸ずれを生じているかを検出することができる。前記駆動手段は、レーダ手段を機械的に角変位する構成であってもよいけれども、ビーム放射方向を電気的手法によって角変位する後述のフェイズドアレイアンテナなどによって走査する構成であってもよい。軸ずれ角θに代えて、軸ずれ角θに対応する値であってもよい。
【0044】
軸ずれ角θが零でなく、したがって軸ずれを生じているとき、角度検出手段による検出角度φを、(φ+θ)に補正して、被検出物体の位置の検出のために用い、または後述の調整手段12によってレーダ手段および駆動手段の車両との取付け姿勢を調整する。これによって前記仮想直線、したがってビーム放射方向の前記予め定める軸線7を、車両の直線走行方向の軸線21に仮想上、正確に一致することができる。これによって車両の前方に存在する被検出物体との間の距離および走査角変位の角度φに基づいて、被検出物体の位置を正確に把握することができるようになる。
【0045】
車両の直線走行方向の軸線21に関して、操作されるビームの角度φの軸ずれを、車両の走行中においても、容易に自動的に検出することができるようになる。したがってレーダ手段などの車両への取付け姿勢が、変化しても、軸ずれを検出することによって、被検出物体の位置を正確に検出することができるようになる。このような車両用レーダ装置は、被検出物体との間が予め定める値未満になったとき、制動動作を行うようにしてもよく、また前方を走行中の車両との間の距離を同一に保つように走行するために、実施することができる。
【0046】
(2)軸ずれ角演算手段は、
レーダ手段と角度検出手段との各出力に応答し、前記仮想直線を演算する仮想直線演算手段と、
仮想直線演算手段の出力に応答し、仮想直線の傾きkに基づいて軸ずれ角θを演算する手段とを含むことを特徴とする車両用レーダ装置の軸ずれ検出装置。
【0047】
前記仮想直線を演算し、1次関数を求め、その仮想直線の傾きkに対応した軸ずれ角θを演算する。こうして軸ずれ角θを容易に求めることができる。この仮想直線の1次関数は、前記複数の検出位置に基づいて最小二乗法によって演算して求めるようにしてもよい。
【0048】
仮想直線である1次関数を求め、軸ずれ角θを容易に演算して求めることができるようになる。
【0049】
(3)車両が直線走行していることを検出する直線走行検出手段と、
直線走行検出手段の出力に応答し、直線走行時にのみ、軸ずれ角演算手段を動作させる直線走行用制御手段とを含むことを特徴とする車両用レーダ装置の軸ずれ検出装置。
【0050】
直線走行検出手段によって、車両が直線走行していることが検出されたときにのみ、直線走行用制御手段は軸ずれ角演算手段を動作させ、これによって軸ずれ角θが演算される。こうして直線道路の路側に設置されたガードレールなどの道路と平行な被検出物体を検出し、実際の走行状態における軸ずれ角θを正確に検出することが可能になる。
【0051】
車両が直線走行しているときにのみ、軸ずれ角θを演算して求めるので、実際の走行状態における軸ずれ角θを正確に検出することができるようになる。
【0052】
(4)軸ずれ角演算手段によって演算された軸ずれ角θをストアするメモリと、
電源投入時から、少なくとも軸ずれ角演算手段によって軸ずれ角θが演算されるまでの期間中、メモリにストアされた軸ずれ角θを読出して出力する出力手段とを含むことを特徴とする車両用レーダ装置の軸ずれ検出装置。
【0053】
本件軸ずれ検出装置の立ち上げ時、すなわちたとえば電源投入時から、軸ずれ角演算手段によって実際の軸ずれ角θが演算されるまでの期間中は少なくとも、メモリに予めストアされている軸ずれ角θを用い、被検出物体の検出位置の補正を行うことを可能にする。このメモリには、本件軸ずれ検出装置の電源遮断時直前における検出された軸ずれ角θをストアするようにしてもよく、このメモリは不揮発性メモリによって実現されてもよい。
【0054】
本件軸ずれ検出装置の立ち上げ時に、たとえば電源投入時から、最初の軸ずれ角θが演算されるまでの期間中、メモリにストアされている軸ずれ角θを導出し、これによって被検出物体の位置を正確に検出することができる。
【0055】
(5)車両に作用する加速度を検出する加速度センサと、
加速度センサの出力に応答し、検出された加速度が予め定める値以上であるとき、軸ずれ角演算手段を動作させる加速度用制御手段とを含むことを特徴とする車両用レーダ装置の軸ずれ検出装置。
【0056】
加速度センサによって車両のたとえば走行方向前後の加速度を検出し、この検出された加速度が予め定める値以上であって、車両に比較的大きな衝撃力が作用したとき、軸ずれ角演算手段を動作させて、新たに軸ずれ角θを演算して求める。車両に大きな衝撃力が作用したとき、車両に装着されたレーダ手段および駆動手段は、車両との相対的な装着姿勢が変化するおそれがあり、このようなとき、軸ずれ角θを新たに演算し直すことによって、常に実際の正確な軸ずれ角θを検出することができる。
【0057】
加速度センサによって、予め定める値以上の衝撃力が車両に作用したときに、軸ずれ角θを新たに演算し直すので、常に実際の正確な軸ずれ角θを検出することができる。
【0058】
(6)前記駆動手段は、レーダ手段を、前記角変位範囲内で前記予め定める軸線7の両側にわたって角変位駆動することを特徴とする車両用レーダ装置の軸ずれ検出装置。
【0059】
レーダ手段によるビームを、角変位範囲内における前記予め定める軸線7の左右両側にわたって角変位駆動し、これによって車両の前方における比較的広い範囲にわたって被検出物体の検出を行うことができる。
【0060】
レーダ手段によるビームを、前記軸線7の左右両側にわたって角変位駆動して走査し、したがって車両の前方における比較的広い範囲にわたって被検出物体を検出を行うことができる。
【0061】
(8)レーダ手段と駆動手段とを一体的に、車両に取付ける姿勢を、調整する調整手段を含むことを特徴とする車両用レーダ装置の軸ずれ検出装置。
【0062】
レーダ手段と駆動手段とを一体的にして、調整手段によって車両に取付ける姿勢を調整することができるようになる。これによって軸ずれ角θを零となるように調整することができる。調整手段は、作業者が手動によって取付け姿勢を調整するように構成されてもよいけれども、電気信号に応答して自動的に取付け姿勢を調整するように構成されてもよい。
【0063】
調整手段によって軸ずれ角θが零となるように調整することができ、被検出物体の位置を正確に検出することができるようになる。
【0064】
(9)レーダ手段と駆動手段とを一体的に、車両に取付ける姿勢を、調整する調整手段と、
軸ずれ角演算手段の出力に応答し、
軸ずれ角θが零となるように、調整手段を駆動する調整駆動手段とを含むことを特徴とする。
【0065】
(10)レーダ手段と駆動手段とを一体的に、車両に取付ける姿勢を、調整する調整手段と、
角度差演算手段の出力に応答し、角度φL,φRの差θsが零となるように、調整手段を駆動する調整駆動手段とを含むことを特徴とする車両用レーダ装置の軸ずれ検出装置。
【0066】
軸ずれ角θまたはその軸ずれ角θに対応する角度差θsが零となるように、レーダ手段と駆動手段とを一体的に車両に取付ける姿勢を調整する調整手段を、調整駆動手段によって駆動して制御する。こうしてビームの角変位範囲内における前記予め定める軸線を、車両の直線走行の軸線に常に正確に一致することが自動的に可能になる。
【0067】
軸ずれ角θまたはそれに対応する角度差θsを演算して求め、軸ずれをなくすように調整駆動手段によって調整手段を駆動し、こうして被検出物体の位置を正確に検出することが可能になる。
【図面の簡単な説明】
【0068】
【図1】本発明の実施の一形態の全体の電気的構成を示すブロック図である。
【図2】センサ装置2および駆動手段5とその付近の構成を示す簡略化した斜視図である。
【図3】自動車である車両13が直線道路14を走行している状態を示す平面図である。
【図4】図1に示されるレーダ手段25によって被検出物体との間の距離を求める動作を説明するための波形図である。
【図5】図1に示されるレーダ手段25によって被検出物体との相対速度を求める動作を説明するための波形図である。
【図6】レーダ手段25のセンサ装置2が軸ずれを生じていないときにおける表示手段38による表示状態を示す図である。
【図7】レーダ手段25のセンサ装置2によるビーム放射方向の軸線7bが、車両13の軸線21に関して軸ずれを生じたときにおける表示手段38の表示状態を示す図である。
【図8】処理回路24による軸ずれ角θを演算する具体的な動作を説明するためのフローチャートである。
【図9】本件発明者による一実験結果を示す図である。
【図10】本件発明者による他の実験結果を示す図である。
【図11】本発明の実施の他の形態における直線道路56を車両13が直線走行している状態を示す簡略化した平面図である。
【図12】図11に示される本発明の実施の形態において、処理回路24の演算結果が表示手段28の2次元表示画面に表示された状態を示す図である。
【図13】図11および図12に示される実施の形態における処理回路24の一部の動作を説明するためのフローチャートである。
【符号の説明】
【0069】
1 車両用レーダ装置の軸ずれ検出装置
2 センサ装置
3 送信アンテナ
4 受信アンテナ
5 駆動手段
6 縦の軸線
7,7a,7b ビーム放射方向の予め定める軸線
8 角変位範囲
11 角度検出手段
12 調整手段
13 車両
14 道路
21 車両13の直線走行方向の軸線
24 処理回路
25 レーダ手段
36 ヨーレートセンサ
37 加速度センサ
38 表示手段
39,40 メモリ
51 電源スイッチ
53 車速センサ
φ 検出角度
θ 軸ずれ角
yLa,yRa,yLb,yRb 仮想直線
【技術分野】
【0001】
本発明は、車両用レーダ装置の軸ずれ検出装置に関し、特に、たとえば自動車などの車両に搭載され、ミリ波帯の高周波信号ビームまたはレーザビームなどのビームを、ほぼ水平面内で、ほぼ鉛直な縦の軸線まわりに角変位して走査し、被検出物体までの距離を計測する車両用レーダ装置の軸ずれ検出装置に関する。
【背景技術】
【0002】
このようないわば走査形の車両用レーザ装置では、車両の直線走行方向の軸線に関して、ビームを走査する角度φが正確に検出されていなければならない。さもなければ、計測した距離とビームの走査の中心である前記縦の軸線まわりの角度φとに対応した被検出物体の位置を正確に検出することができない。したがって、車両の直線走行方向の軸線に関するビーム角度φを正確に検出することができなくなった軸ずれの状態では、被検出物体の位置の誤検出が生じる。したがって軸ずれが生じないように補正または調整する必要がある。レーダ装置が車両に装着された状態において、振動によって、または経年変化などによって、レーダ装置の車両への装着状態が変化し、軸ずれを生じるおそれがある。
【0003】
従来から、このような軸ずれの検出を、常時、特に車両の走行中においても、容易に行うことができる構成は、提案されていない。
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明の目的は、車両の直線走行方向の軸線に関して、走査されるビームの角度φの軸ずれを、車両の走行中においても、容易に検出する車両用レーダ装置の軸ずれ検出装置および方法を提供することである。
【課題を解決するための手段】
【0005】
本発明(1)は、車両に設けられ、前方に向けてビームを放射し、被検出物体による反射ビームを受信して、被検出物体との間の距離を検出するレーダ手段と、
レーダ手段を縦の角変位軸線まわりに、予め定める角変位範囲8内で、かつ、その角変位範囲内のビーム放射方向の予め定める軸線7の少なくとも両側にわたって、角変位駆動する駆動手段と、
レーダ手段の駆動手段による角度を検出する角度検出手段とを含み、
レーダ手段は、角変位範囲内の前記両側で、距離をそれぞれ検出する車両用レーダ装置の軸ずれ検出装置において、
左右の同一距離に対応する角度検出手段による検出角度φL,φRの差θsを演算する角度差演算手段とを含むことを特徴とする車両用レーダ装置の軸ずれ検出装置である。
【0006】
また本発明(2)は、車両に設けられ、前方に向けてビームを放射し、被検出物体による反射ビームを受信して、被検出物体との間の距離を、縦の角変位軸線まわりで、予め定める角変位範囲8内のビーム放射方向の予め定める軸線7の少なくとも両側でそれぞれ検出するレーダ装置の軸ずれ検出方法において、
レーダ装置を縦の角変位軸線まわりに、予め定める角変位範囲8内で、かつ、その角変位範囲内のビーム放射方向の予め定める軸線7の少なくとも両側にわたって、角変位駆動し、
レーダ装置の角変位駆動による角度φを検出し、
角度を検出することによって得られる左右の同一距離に対応する検出角度φL,φRの差θsを演算することを特徴とする車両用レーダ装置の軸ずれ検出方法である。
【0007】
本発明(1),(2)に従えば、図11〜図13に関連して後述されるように、車両に設けられるレーダ手段を、たとえば鉛直である縦の軸線6まわりに角変位してビームをたとえば水平面内で走査偏向し、その走査が行われる角変位範囲内で、ビーム放射方向の予め定める軸線7に関して左右両側で少なくとも1回、たとえば複数回、被検出物体との間の距離をそれぞれ検出する。左右の同一距離に対応した角度φL,φRの差θsを角度差演算手段によって演算して求める。これによって軸ずれ角θ(=θs/2)を検出することができる。
【発明の効果】
【0008】
本発明(1),(2)によれば、ビーム放射方向の予め定める軸線7に関して左右両側で少なくとも1回、すなわち左側少なくとも1回および右側で少なくとも1回、被検出物体との間の距離を検出し、その距離に対応する角度検出手段の出力によって表される角度を求め、こうして左右の同一距離に対応した角度φL,φRの差θsを演算して求めることによって、軸ずれ角θを検出することができるようになる。
【発明を実施するための最良の形態】
【0009】
図1は、本発明の実施の一形態の全体の電気的構成を示すブロック図である。走査形FM−CW(Frequency Modulation-Continuous Wave)レーダ装置1のセンサ装置2は、自動車などの車両に搭載され、送信アンテナ3によって車両の前方にミリ波帯の高周波信号のビームまたはレーザビームなどのビームが、放射される。被検出物体による反射ビームは、受信アンテナ4によって受信される。このセンサ装置2は、駆動手段5に連結される。
【0010】
図2は、センサ装置2,駆動手段5、およびその付近の構成を示す簡略化した斜視図である。センサ装置2では、ほぼ鉛直の縦の角変位軸線6まわりに、ビーム放射方向の予め定める軸線7の左右の少なくとも一方側(この実施の形態では左右両側)にわたって、最大角度φaL,φaRの角変位範囲内で角変位駆動する。たとえばφaL=φaR=5度であってもよい。この予め定める軸線7に関する左右の最大角度φaL,φaRにわたる角変位範囲は、参照符8で示される。センサ装置2の駆動手段5による前記角変位範囲8内の前記軸線7に関する角度φiは、角度検出手段11によって検出される。この角度検出手段11は、たとえばポテンシオメータなどによって実現されてもよい。角変位範囲8は、縦の軸線6に垂直なほぼ水平面内に存在する。
【0011】
センサ装置2と駆動手段5と角度検出手段11などとは、一体的に、調整手段12を介して車両の車体に取付けられる。調整手段12は、電気信号によって、センサ装置2と駆動手段5と角度検出手段11などとの車両に取付ける姿勢を調整することができ、たとえば水平面内で角変位して調整する。調整手段12は、作業者の手動によって取付け姿勢が変化して調整されるように構成されてもよい。
【0012】
図3は、自動車である車両13が直線道路14を走行している状態を示す平面図である。道路14は、白線などの中央線15の左右に走行レーン16,17を有する。各走行レーン16,17に沿って、路側には静止物体である水平に延びるガードレール18,19が設置される。センサ装置2が軸ずれを生じていない状態における角変位範囲は、参照符8aで示され、右方に軸ずれを生じている状態は参照符8bで示される。
【0013】
軸ずれというのは、角変位範囲8内のビーム放射方向の前記予め定める軸線7が、車両13の直線走行方向の軸線21と成す軸ずれ角θが零でない状態をいう。すなわち角度検出手段11が、たとえばポテンシオメータによって実現される構成において、検出角度φに対応する出力電圧が1次直線で表されるとき、ビーム放射方向の前記軸線7の角度に対応する電圧V7と、車両13の前記軸線21に対応する電圧V21とが一致しないとき、その電圧の差ΔV(=V7−V21)に対応する軸ずれ角θが発生していることになる。したがって角度検出手段11の出力電圧Vを、(V+ΔV)に演算し直して補正することによって、角度検出手段11の出力からビームの放射されている実際の角度φを正確に検出することができるようになる。このような軸ずれが生じている状態では、車両13の前方に存在する他の車両およびガードレール18,19などの距離および角度検出手段11による角度によって演算される車両13との相対的な検出位置を正確に得ることができなくなる。本発明では、この軸ずれ角θを正確に自動的に検出することができるようになり、この軸ずれ角θが零となるように、角度検出手段11による検出角度φが補正され、または調整手段12が動作する。たとえば前記軸線7に対応する角度検出手段11の検出角度φが、車両13の前記軸線21に関して、誤差である右に正または左に負の軸ずれ角θを生じているとき、角度検出手段11によって検出される角度φを、(φ+θ)に補正する。
【0014】
センサ装置2からライン23に導出される出力は、マイクロコンピュータなどによって実現される処理回路24に与えられ、これによってFM−CWレーダ方式によって、距離と相対速度とが計測される。センサ装置2と処理回路24とは、レーダ手段25を構成する。
【0015】
図4は、図1に示されるレーダ手段25によって被検出物体との間の距離を求める動作を説明するための波形図である。図5は、図1に示されるレーダ手段25によって被検出物体との相対速度を求める動作を説明するための波形図である。これらの図面を参照して、レーダ手段25のセンサ装置2において、変調信号発生器27は、たとえば750Hzの周波数を有する三角波を発生し、発振器28が出力するミリ波帯の高周波である搬送波信号を、周波数変調(略称FM)され、その結果得られるFM変調された送信信号34は、送信アンテナ3から被検出物体に向けて放射される。被検出物体による反射ビームの受信波35は、受信アンテナ4によって受信され、混合器29に与えられる。この混合器29にはまた、発振器28からの高周波信号が方向性結合器31を経て、与えられる。混合器29からのビート周波数fbを有するビート信号は、増幅器32によって増幅され、前述のライン23を介して処理回路24に与えられる。受信アンテナ4によって受信される被検出物体からの反射ビームの受信アンテナ4による受信波35は、センサ装置2と被検出物体との間の距離に対応する距離周波数frが変化し、また図5に示されるように被検出物体との相対速度に対応する速度周波数fdが変化する。混合器29から導出されるビート信号のビート周波数fbは、式1で示される。
fb = fr±fd …(1)
【0016】
変調信号発生回路27からの変調信号の変調幅をΔΩとし、変調波周期をTとし、cを光速とし、Rをセンサ装置2と被検出物体との間の距離とし、vを被検出物体との相対速度とし、f0を、搬送波を発生する発振器28の送信中心周波数とするとき、式2および式3が成立する。
fr = 4・ΔΩ・T・R/c …(2)
fd = 2・f0・v/c …(3)
【0017】
したがって、FM−CWレーダ方式において、処理回路24は、式2および式3に基づき、周波数fr,fdを求めることによって、距離Rおよび相対速度vを演算して計測する。
【0018】
処理回路24にはまた、角度検出手段11からの出力が与えられ、さらにヨーレートセンサ36と加速度センサ37の出力が与えられる。処理回路24による演算結果は、陰極線管または液晶などの表示手段38に表示される。処理回路24には、メモリ39,40が接続される。メモリ39は、書込み可能な不揮発性メモリであって、たとえばEEPROM(Electrically Erasable Programmable Read only Memory)などによって実現することができる。メモリ40は、たと
えばランダムアクセスメモリによって実現される。
【0019】
図6は、レーダ手段25のセンサ装置2が軸ずれを生じていないときにおける表示手段38による表示状態を示す図である。センサ装置2によるビーム放射方向の前記予め定める軸線7は、車両13の直線走行方向の軸線21に、一致し、または平行である。車両13が前述の図3に示されるように左走行レーン16を直線走行中、ビームが角変位範囲8aの前記軸線7aに関して一方側、すなわち左側で、複数回、距離Riを検出し、またこのとき、角度検出手段11によって前記軸線7aに関する角度φiが検出され、こうして左ガードレール18の各検出位置41の座標(Ri,φi)が得られる。このような複数の検出位置41のうち、たとえば最小二乗法の手法によって、角度検出手段11による同一角度φの計測距離Rのうち最小値である検出位置42を結ぶ仮想直線yLaを演算して求める。この仮想直線yLaは、車両13の軸線21をx軸とし、そのx軸に直交する車両13の左右幅方向をy軸とする2次元平面内で得られる。この走行中、または車両13が右走行レーン17を前述と同一方向に直線走行中、右ガードレール19が前述と同様にして検出されるとき、その検出位置43が得られ、それらの検出位置43のうち、各角度の最小の検出位置44を結ぶ仮想直線yRaを得ることもまた、可能である。図6では、仮想直線yLa,yRaは、x軸に平行であり、その傾きk(後述の式4を参照)は、零であり、軸ずれ角θ=0である。
【0020】
本件明細書の説明における参照符に含まれる添え字a,b,Lは、省略されて総括的に示すことがある。
【0021】
図7は、レーダ手段25のセンサ装置2によるビーム放射方向の前記軸線7bが、車両13の軸線21に関して軸ずれを生じたときにおける表示手段38の表示状態を示す図である。ビーム放射方向の軸線7bは、図7において車両13の軸線21に関して右方に、零でない軸ずれ角θだけずれている。車両13が図3の左走行レーン16を直線走行中、左ガードレール18の検出位置45が得られ、これによって角度検出手段11によって検出される複数の各角度毎の最小の計測距離の検出位置46を結ぶ仮想直線yLbが、前述と同様にたとえば最小二乗法の手法によって得られる。これによって前述と同様な2次元画面において、軸ずれ角θを得ることができる。また同様に右走行レーン17の右ガードレール19の検出位置47のうち最小距離の検出位置48から、仮想直線yRbが得られ、軸ずれ角θが得られる。
【0022】
処理回路24によって得られる図6の仮想直線yLa,yRaと、図7の仮想直線yLb,yRbとを、総括的に参照符yで表すとき、その1次直線の式は、次のように表される。
y = kx+r …(4)
【0023】
この仮想直線yの傾きkは、軸ずれ角θに対応する。
θ = tan-1k …(5)
【0024】
処理回路24は、センサ装置2および角度検出手段11の各出力に応答して、図6および図7に関連して前述したように、車両13の軸線21であるx軸と、そのx軸に直交する車両13の左右方向のy軸とから成る2次元平面内で、ビーム放射方向の前記軸線7に関して少なくとも一方側、たとえば左方にわたる角変位範囲θaL内で、複数回、距離を検出し、角度検出手段11によって検出される検出角度φiが相互に異なる複数の検出位置42,46を結ぶ仮想直線yLa,yLbを演算し、その傾きkによって、軸ずれ角θを演算して求めることができる。右ガードレール19が検出されるときにもまた、同様にして仮想直線yRa,yRbが前述のように得られ、このときにもまた、軸ずれ角θを演算して求めることができる。
【0025】
図8は、処理回路24による軸ずれ角θを演算する具体的な動作を説明するためのフローチャートである。ステップu1からステップu2に移り、図1に示される電源スイッチ51が投入されたことが処理回路24によって判断されると、ステップu3では、書込み可能な不揮発性メモリ39から、予めストアされている軸ずれ角θを読出す。ステップu4では、この読出された軸ずれ角θに対応する電気信号が処理回路24から調整手段12に与えられ、軸ずれ角θが零となるように、センサ装置2、駆動手段5および角度検出手段11が、角変位調整される。実施の他の形態では、メモリ39から読出された軸ずれ角θを用いて、角度検出手段11による検出角度φを補正するようにしてもよい。メモリ39には、後述のステップu14に関連して説明されるように、電源スイッチ31の遮断直前に検出された最後の軸ずれ角θがストアされる。電源スイッチ51は、車両13の内燃機関のための点火回路の電源52に関連して設けられたアクセサリスイッチであってもよい。
【0026】
ステップu5では、ヨーレートセンサ36の出力によって車両13が直線走行しているかどうかを判断する。直線走行しているとき、次のステップu6に移る。ステップu6では、車速センサ53によって検出される車両13の走行速度v1が、予め定める値v10以上であるか(v1≧v10)が判断される。この予め定める値v10は、たとえば60km/hであってもよい。こうして車両13が予め定める値v10以上の速度で走行中に、軸ずれ角θが検出される。これによって車両13の軸線21と、センサ装置2によるビームの角変位範囲8内における前記予め定める軸線7とを、実際の走行中に正確に一致することができ、軸ずれ角θを確実に零とすることができるようになる。
【0027】
ステップu7では、タイマW1を零とし、次のステップu8では、センサ装置2の働きによって被検出物体までの距離Riを演算して求める。ステップu9ではこの距離Riが得られるときにおける角度検出手段11によって検出される角度φiが得られる。ステップu10では、タイマW1を時間ΔW1だけインクリメントする。タイマW1の計測時間を同一の参照符で表すとき、ステップu11では、タイマW1の時間が予め定める時間W10以上であるか(W1≧W10)が判断される。W10は、たとえば6秒などであってもよく。距離Riと角度θiとの計測サンプリング時間間隔ΔW1は、たとえば6msecであってもよい。こうして得られた距離Riと角度θiとによって、前述の2次元平面内で、u12では、仮想直線yが前述の式4から、たとえば2分毎に求められる。ステップu13では、仮想直線yの傾きkから、前述の式5によって軸ずれ角θが得られる。こうして得られた軸ずれ角θは、ステップu14によってメモリ39に書込まれる。ステップu15では調整手段12が動作され、前述のステップu13で得られた軸ずれ角θが零となるように、制御される。
【0028】
ステップu16では、加速度センサ37によって検出される車両13の走行方向に沿う加速度a1に応答し、その検出された加速度a1が、予め定める値a10以上であるか(a1≧a10)を判断し、加速度が大きいとき、軸ずれが生じている可能性が大きく、そのような加速度が大きいとき、再びステップa8に戻る。本発明の実施の他の形態では、ステップu7〜ステップu15を、常時連続して繰返し行うように構成してもよい。
【0029】
車両13が前述のステップu5において直線走行状態であるかどうかは、上述の実施の形態では車両13の鉛直軸線まわりの旋回を検出するヨーレートセンサ36の出力によって行われたけれども、本発明の実施の他の形態では、(1)車両13の運転者が走査する操舵輪の角度または操舵角をセンサによって検出するようにしてもよく、または(2)車両13に搭載されて前方の景色を撮像するテレビカメラを備え、撮像された画像を処理して直線走行を検出する構成としてもよく、さらにまた(3)車両13の走行位置を検出するGPS(Global Positionning System)装置によって道路地図データと対応し、直線走行を検出する構成であってもよく、(4)そのほかの構成によって直線走行を検出するようにしてもよい。
【0030】
図9は、本件発明者による実験結果を示す図である。図9の実験結果は、前述の図7に対応する。本件発明者は図1〜図8に示される前述の実施例によって、同一走行方向の左右各1車線の道路14の左走行レーン16を直線走行することによって、図9に示される黒点で表される検出位置を得ることができた。図9において仮想直線yLb1を、最小二乗法によって得ることができ、その傾きkに対応した軸ずれ角θ1を求めることができた。図9では、この軸ずれ角θ1は、たとえば0.1度未満であって比較的小さい値であり、調整手段12によって軸ずれのための補正動作を行わなくてもよい。軸ずれ調整を調整手段12によって行うかどうかの判断は、仮想直線yLb1が、車両13の直線走行時の軸線21であるx軸上の予め定める位置x1以上(図9の位置x1よりも上方)で交差するかどうかの判断を行うことによって達成することができ、仮想直線yLb1が、x軸と前記位置x1以上で交差するとき、軸ずれ角θ1が、小さい値であって、調整手段12による軸ずれ補正を行う必要がないものと判断することができる。仮想直線yLb1が、X軸と位置x1未満(図9の下方)でX軸と交差するとき、軸ずれ角θ1が大きく、したがって調整手段12による調整動作が必要なものと判断し、調整動作を行うように構成することができる。
【0031】
図9において仮想直線yLb1を演算して求めるにあたり、その演算処理量をできるだけ小さくするために、図9に示される2次元平面内で、前記位置x1を含む領域55を設定し、この領域55内に存在する検出位置のみを用いて仮想直線yLb1の演算を行うようにしてもよい。これによって処理回路24による演算処理量をできるだけ少なくし、仮想直線yLb1を迅速に求めることができる。
【0032】
図10は、本件発明者による他の実験結果を示す図である。演算によって得られた仮想直線yLb2は、車両13の軸線21であるx軸と、位置x1未満の範囲で交差し、したがってその軸ずれ角θ2が比較的大きく、調整手段12による軸ずれ調整動作が行われる。そのほかの実験の条件は、前述の図9に関連して述べた実験と同様である。軸ずれ角θ2は、図10の実験では、2度である。
【0033】
図11は、本発明の実施の他の形態における直線道路56を車両13が直線走行している状態を示す簡略化した平面図である。車両13が走行している走行レーン57の左右両側に、走行レーン58,59が存在し、したがってこの道路では、同一走行方向に、少なくとも合計3車線以上存在する。走行レーン58,59には、車両61,62が同一方向に走行している。車両13には、前述の図1〜図10に関連して述べた実施の形態における車両用レーダ装置の軸ずれ検出装置が搭載されている。この実施の形態では、車両13が走行レーン57を直線走行しているとき、左右の走行レーン58,59を走行する他の車両61,62を検出することによって、軸ずれ角θを検出することができる。このような左右の走行レーン58,59を走行している車両61,62は、車両13とはその走行速度が異なり、したがって複数回にわたって、車両13に搭載されたレーダ装置を用いて車両61,62を検出して、前述の実施の形態における、左右のガードレール18,19と同様な被検出物体として扱い、軸ずれ角θを演算して求めることができる。この実施の形態は、前述の実施の形態と類似する構成を有し、同一の参照符を用いて説明する。
【0034】
図12は、図11に示される本発明の実施の形態において、処理回路24の演算結果が表示手段28の2次元表示画面に表示された状態を示す図である。センサ装置2と角度検出手段11との出力によって処理回路24は、被検出物体である車両61,62までの距離Rと、角度検出手段11による検出角度φとの関係を示す図である。道路56の車両13が直線走行している走行レーン57に関して左方の走行レーン58を走行する車両61を検出することによって、ライン64が得られ、また右方のレーン59を走行する車両62を検出することによってライン65が得られる。各レーン58,59には、予め定める時間、たとえば20分間に、複数の車両61,62が走行し、車両13の速度と車両61の速度とは前述のようになっている。車両13に搭載されている軸ずれ検出装置における処理回路24が、レーン58,59を走行中の時間経過に伴って異なる車両61,62を前記予め定める時間中検出することによって、図12に示される各ライン64,65の実験結果が得られる。各ライン64,65は、予め定める距離R1において角度L,φRの差θs(=φL−φR)が存在する。この角度差θsは、前述の軸ずれ角θに対応する(θ=θs/2)。
【0035】
図13は、図11および図12に示される実施の形態における処理回路24の一部の動作を説明するためのフローチャートである。この図13のステップh1〜ステップh4は、図8のステップu8〜ステップu13に代えて、実行される。ステップh1では、車両13の前方に、前述の実施の形態と同様に、ビームを放射操作し、その反射ビームを受信することによって、車両13の走行しているレーン57の両側の各レーン58,59を走行している各車両61,62までの距離RiL,RiRを演算して求める。ステップh2では、これらの各距離RiL,RiRが得られるときにおける角度検出手段11によって検出された角度φiL,φiRをそれぞれ求める。こうして得られた左右の各距離と角度との複数の組合せデータ(RiL,φiL)、(RiR,φiR)を、予め定める時間W10にわたってメモリ40にストアする。こうして前述の図12に示される距離Rと角度φとに対応するライン64,65が得られる。
【0036】
ステップh3では、予め定める同一の距離R1における角度φiL,φiRの角度差θs(=φiL−φiR)を演算して求める。これによって軸ずれ角θを演算する。ステップh4では、タイマW1の時間が、予め定める時間W10以上になったか(W1≧W10)が判断され、そうであれば図8のステップu14以下の動作が実行される。本発明の実施の他の形態では、車両13が走行する走行レーン58,59のいずれか少なくとも一方では、車両61,62が、車両13とは逆方向に走行していてもよい。さらにまた車両13は停止したままであってもよい。
【0037】
本発明の実施の他の形態では、検出された軸ずれ角θが予め定める値θ11以上であるとき、軸ずれ検出装置の動作を休止する。この値θ11は、たとえば2度以上の値であってもよい。作業者は、軸ずれ角θが異常に大きくなった原因を究明し、修理を行う。
【0038】
センサ装置2からライン23を介して処理回路24に与えられる被検出物体の反射ビームに対応する信号について、処理回路24によってその信号の最大受信レベルの周波数に対応した距離および相対速度を演算するようにしてもよく、またはその受信レベルをレベル弁別し、受信レベルが予め定める値以上であるときにおける信号周波数を演算するようにしてもよい。
【0039】
本発明は、前述のFM−CWレーダ方式だけでなく、そのほかの構成を有するレーダ方式を採用して、非検出物体との距離を計測するレーダ手段に関連して、広範囲に実施することができる。
【0040】
レーダ手段から放射されるビームを角変位して走査するために、レーダ手段を機械的構成によって角変位する構成としてもよく、またはレーダ手段の送信アンテナおよび受信アンテナだけを機械的に角変位する構成であってもよく、さらに送信波および受信波の角度を電気的手法によって角変位してもよく、たとえば送信アンテナおよび受信アンテナとしてフェイズドアレイアンテナを用い、このフェイズドアレイアンテナの各アンテナ素子から放射される電磁波のビームの位相差を変化する構成としてもよい。
【0041】
本発明は、以下の実施の形態が可能である。
(1)車両に設けられ、前方に向けてビームを放射し、被検出物体による反射ビームを受信して、被検出物体との間の距離を検出するレーダ手段と、
レーダ手段を縦の角変位軸線まわりに、予め定める角変位範囲8内で、かつ、その角変位範囲内のビーム放射方向の予め定める軸線7の少なくとも一方側にわたって、角変位駆動する駆動手段と、
レーダ手段の駆動手段による角度φを検出する角度検出手段とを含み、
レーダ手段は、角変位範囲内の前記少なくとも一方側で複数回、距離を検出する車両用レーダ装置の軸ずれ検出装置において、
レーダ手段と角度検出手段との各出力に応答し、前記予め定める軸線の少なくとも一方の側で、被検出物体の検出角度φが相互に異なる複数の各検出位置を結ぶ仮想直線が車両の直線走行方向の軸線と成す軸ずれ角θを演算する軸ずれ角演算手段を含むことを特徴とする車両用レーダ装置の軸ずれ検出装置。
【0042】
図1〜図9に関連して後述されるように、自動車などの車両の車体にレーダ手段が設けられ、このレーダ手段は、ミリ波帯などの高周波信号ビーム、またはレーザビームなどのビームを車両の前方に向けて放射し、被検出物体、たとえば車両の走行方向前方を走行している車両および道路の路側に設置されたガードレールなどによる反射ビームを受信し、これによって被検出物体との間の距離を検出する。レーダ手段は、駆動手段によって、たとえば鉛直の縦の角変位軸線6まわりに予め定める角変位範囲φaL,φaR内で、ビーム放射方向の予め定める軸線7の少なくとも一方側、たとえば左側または右側にわたって、角変位駆動し、こうしてビームをたとえばほぼ水平面内で走査して偏向することができる。レーダ手段の駆動手段による角度は、角度検出手段によって検出される。レーダ手段は、角変位範囲内の少なくとも一方側で複数回、距離を検出する。
【0043】
こうして車両が直線状の道路を走行し、その道路の側方にガードレールが道路に沿って直線状に設置されている状態で、レーダ手段は、ビームの走査位置に、前記一方側で、被検出物体であるガードレールまでの距離を、複数回検出することができる。そこで、得られた前記一方側における検出角度φが相互に異なる複数の各検出位置を結ぶ仮想直線yLa,yRaが、車両の直線走行方向の軸線21と成す軸ずれ角θを演算する。これによって車両の直線走行中、レーダ手段によって検出されるガードレールと車両の直線走行方向の軸線とが平行となって軸ずれ角θが零であって軸ずれを生じていないか、または軸ずれ角θが零でない或る値であって、軸ずれを生じているかを検出することができる。前記駆動手段は、レーダ手段を機械的に角変位する構成であってもよいけれども、ビーム放射方向を電気的手法によって角変位する後述のフェイズドアレイアンテナなどによって走査する構成であってもよい。軸ずれ角θに代えて、軸ずれ角θに対応する値であってもよい。
【0044】
軸ずれ角θが零でなく、したがって軸ずれを生じているとき、角度検出手段による検出角度φを、(φ+θ)に補正して、被検出物体の位置の検出のために用い、または後述の調整手段12によってレーダ手段および駆動手段の車両との取付け姿勢を調整する。これによって前記仮想直線、したがってビーム放射方向の前記予め定める軸線7を、車両の直線走行方向の軸線21に仮想上、正確に一致することができる。これによって車両の前方に存在する被検出物体との間の距離および走査角変位の角度φに基づいて、被検出物体の位置を正確に把握することができるようになる。
【0045】
車両の直線走行方向の軸線21に関して、操作されるビームの角度φの軸ずれを、車両の走行中においても、容易に自動的に検出することができるようになる。したがってレーダ手段などの車両への取付け姿勢が、変化しても、軸ずれを検出することによって、被検出物体の位置を正確に検出することができるようになる。このような車両用レーダ装置は、被検出物体との間が予め定める値未満になったとき、制動動作を行うようにしてもよく、また前方を走行中の車両との間の距離を同一に保つように走行するために、実施することができる。
【0046】
(2)軸ずれ角演算手段は、
レーダ手段と角度検出手段との各出力に応答し、前記仮想直線を演算する仮想直線演算手段と、
仮想直線演算手段の出力に応答し、仮想直線の傾きkに基づいて軸ずれ角θを演算する手段とを含むことを特徴とする車両用レーダ装置の軸ずれ検出装置。
【0047】
前記仮想直線を演算し、1次関数を求め、その仮想直線の傾きkに対応した軸ずれ角θを演算する。こうして軸ずれ角θを容易に求めることができる。この仮想直線の1次関数は、前記複数の検出位置に基づいて最小二乗法によって演算して求めるようにしてもよい。
【0048】
仮想直線である1次関数を求め、軸ずれ角θを容易に演算して求めることができるようになる。
【0049】
(3)車両が直線走行していることを検出する直線走行検出手段と、
直線走行検出手段の出力に応答し、直線走行時にのみ、軸ずれ角演算手段を動作させる直線走行用制御手段とを含むことを特徴とする車両用レーダ装置の軸ずれ検出装置。
【0050】
直線走行検出手段によって、車両が直線走行していることが検出されたときにのみ、直線走行用制御手段は軸ずれ角演算手段を動作させ、これによって軸ずれ角θが演算される。こうして直線道路の路側に設置されたガードレールなどの道路と平行な被検出物体を検出し、実際の走行状態における軸ずれ角θを正確に検出することが可能になる。
【0051】
車両が直線走行しているときにのみ、軸ずれ角θを演算して求めるので、実際の走行状態における軸ずれ角θを正確に検出することができるようになる。
【0052】
(4)軸ずれ角演算手段によって演算された軸ずれ角θをストアするメモリと、
電源投入時から、少なくとも軸ずれ角演算手段によって軸ずれ角θが演算されるまでの期間中、メモリにストアされた軸ずれ角θを読出して出力する出力手段とを含むことを特徴とする車両用レーダ装置の軸ずれ検出装置。
【0053】
本件軸ずれ検出装置の立ち上げ時、すなわちたとえば電源投入時から、軸ずれ角演算手段によって実際の軸ずれ角θが演算されるまでの期間中は少なくとも、メモリに予めストアされている軸ずれ角θを用い、被検出物体の検出位置の補正を行うことを可能にする。このメモリには、本件軸ずれ検出装置の電源遮断時直前における検出された軸ずれ角θをストアするようにしてもよく、このメモリは不揮発性メモリによって実現されてもよい。
【0054】
本件軸ずれ検出装置の立ち上げ時に、たとえば電源投入時から、最初の軸ずれ角θが演算されるまでの期間中、メモリにストアされている軸ずれ角θを導出し、これによって被検出物体の位置を正確に検出することができる。
【0055】
(5)車両に作用する加速度を検出する加速度センサと、
加速度センサの出力に応答し、検出された加速度が予め定める値以上であるとき、軸ずれ角演算手段を動作させる加速度用制御手段とを含むことを特徴とする車両用レーダ装置の軸ずれ検出装置。
【0056】
加速度センサによって車両のたとえば走行方向前後の加速度を検出し、この検出された加速度が予め定める値以上であって、車両に比較的大きな衝撃力が作用したとき、軸ずれ角演算手段を動作させて、新たに軸ずれ角θを演算して求める。車両に大きな衝撃力が作用したとき、車両に装着されたレーダ手段および駆動手段は、車両との相対的な装着姿勢が変化するおそれがあり、このようなとき、軸ずれ角θを新たに演算し直すことによって、常に実際の正確な軸ずれ角θを検出することができる。
【0057】
加速度センサによって、予め定める値以上の衝撃力が車両に作用したときに、軸ずれ角θを新たに演算し直すので、常に実際の正確な軸ずれ角θを検出することができる。
【0058】
(6)前記駆動手段は、レーダ手段を、前記角変位範囲内で前記予め定める軸線7の両側にわたって角変位駆動することを特徴とする車両用レーダ装置の軸ずれ検出装置。
【0059】
レーダ手段によるビームを、角変位範囲内における前記予め定める軸線7の左右両側にわたって角変位駆動し、これによって車両の前方における比較的広い範囲にわたって被検出物体の検出を行うことができる。
【0060】
レーダ手段によるビームを、前記軸線7の左右両側にわたって角変位駆動して走査し、したがって車両の前方における比較的広い範囲にわたって被検出物体を検出を行うことができる。
【0061】
(8)レーダ手段と駆動手段とを一体的に、車両に取付ける姿勢を、調整する調整手段を含むことを特徴とする車両用レーダ装置の軸ずれ検出装置。
【0062】
レーダ手段と駆動手段とを一体的にして、調整手段によって車両に取付ける姿勢を調整することができるようになる。これによって軸ずれ角θを零となるように調整することができる。調整手段は、作業者が手動によって取付け姿勢を調整するように構成されてもよいけれども、電気信号に応答して自動的に取付け姿勢を調整するように構成されてもよい。
【0063】
調整手段によって軸ずれ角θが零となるように調整することができ、被検出物体の位置を正確に検出することができるようになる。
【0064】
(9)レーダ手段と駆動手段とを一体的に、車両に取付ける姿勢を、調整する調整手段と、
軸ずれ角演算手段の出力に応答し、
軸ずれ角θが零となるように、調整手段を駆動する調整駆動手段とを含むことを特徴とする。
【0065】
(10)レーダ手段と駆動手段とを一体的に、車両に取付ける姿勢を、調整する調整手段と、
角度差演算手段の出力に応答し、角度φL,φRの差θsが零となるように、調整手段を駆動する調整駆動手段とを含むことを特徴とする車両用レーダ装置の軸ずれ検出装置。
【0066】
軸ずれ角θまたはその軸ずれ角θに対応する角度差θsが零となるように、レーダ手段と駆動手段とを一体的に車両に取付ける姿勢を調整する調整手段を、調整駆動手段によって駆動して制御する。こうしてビームの角変位範囲内における前記予め定める軸線を、車両の直線走行の軸線に常に正確に一致することが自動的に可能になる。
【0067】
軸ずれ角θまたはそれに対応する角度差θsを演算して求め、軸ずれをなくすように調整駆動手段によって調整手段を駆動し、こうして被検出物体の位置を正確に検出することが可能になる。
【図面の簡単な説明】
【0068】
【図1】本発明の実施の一形態の全体の電気的構成を示すブロック図である。
【図2】センサ装置2および駆動手段5とその付近の構成を示す簡略化した斜視図である。
【図3】自動車である車両13が直線道路14を走行している状態を示す平面図である。
【図4】図1に示されるレーダ手段25によって被検出物体との間の距離を求める動作を説明するための波形図である。
【図5】図1に示されるレーダ手段25によって被検出物体との相対速度を求める動作を説明するための波形図である。
【図6】レーダ手段25のセンサ装置2が軸ずれを生じていないときにおける表示手段38による表示状態を示す図である。
【図7】レーダ手段25のセンサ装置2によるビーム放射方向の軸線7bが、車両13の軸線21に関して軸ずれを生じたときにおける表示手段38の表示状態を示す図である。
【図8】処理回路24による軸ずれ角θを演算する具体的な動作を説明するためのフローチャートである。
【図9】本件発明者による一実験結果を示す図である。
【図10】本件発明者による他の実験結果を示す図である。
【図11】本発明の実施の他の形態における直線道路56を車両13が直線走行している状態を示す簡略化した平面図である。
【図12】図11に示される本発明の実施の形態において、処理回路24の演算結果が表示手段28の2次元表示画面に表示された状態を示す図である。
【図13】図11および図12に示される実施の形態における処理回路24の一部の動作を説明するためのフローチャートである。
【符号の説明】
【0069】
1 車両用レーダ装置の軸ずれ検出装置
2 センサ装置
3 送信アンテナ
4 受信アンテナ
5 駆動手段
6 縦の軸線
7,7a,7b ビーム放射方向の予め定める軸線
8 角変位範囲
11 角度検出手段
12 調整手段
13 車両
14 道路
21 車両13の直線走行方向の軸線
24 処理回路
25 レーダ手段
36 ヨーレートセンサ
37 加速度センサ
38 表示手段
39,40 メモリ
51 電源スイッチ
53 車速センサ
φ 検出角度
θ 軸ずれ角
yLa,yRa,yLb,yRb 仮想直線
【特許請求の範囲】
【請求項1】
車両に設けられ、前方に向けてビームを放射し、被検出物体による反射ビームを受信して、被検出物体との間の距離を検出するレーダ手段と、
レーダ手段を縦の角変位軸線まわりに、予め定める角変位範囲8内で、かつ、その角変位範囲内のビーム放射方向の予め定める軸線7の少なくとも両側にわたって、角変位駆動する駆動手段と、
レーダ手段の駆動手段による角度を検出する角度検出手段とを含み、
レーダ手段は、角変位範囲内の前記両側で、距離をそれぞれ検出する車両用レーダ装置の軸ずれ検出装置において、
左右の同一距離に対応する角度検出手段による検出角度φL,φRの差θsを演算する角度差演算手段とを含むことを特徴とする車両用レーダ装置の軸ずれ検出装置。
【請求項2】
車両に設けられ、前方に向けてビームを放射し、被検出物体による反射ビームを受信して、被検出物体との間の距離を、縦の角変位軸線まわりで、予め定める角変位範囲8内のビーム放射方向の予め定める軸線7の少なくとも両側でそれぞれ検出するレーダ装置の軸ずれ検出方法において、
レーダ装置を縦の角変位軸線まわりに、予め定める角変位範囲8内で、かつ、その角変位範囲内のビーム放射方向の予め定める軸線7の少なくとも両側にわたって、角変位駆動し、
レーダ装置の角変位駆動による角度φを検出し、
角度を検出することによって得られる左右の同一距離に対応する検出角度φL,φRの差θsを演算することを特徴とする車両用レーダ装置の軸ずれ検出方法。
【請求項1】
車両に設けられ、前方に向けてビームを放射し、被検出物体による反射ビームを受信して、被検出物体との間の距離を検出するレーダ手段と、
レーダ手段を縦の角変位軸線まわりに、予め定める角変位範囲8内で、かつ、その角変位範囲内のビーム放射方向の予め定める軸線7の少なくとも両側にわたって、角変位駆動する駆動手段と、
レーダ手段の駆動手段による角度を検出する角度検出手段とを含み、
レーダ手段は、角変位範囲内の前記両側で、距離をそれぞれ検出する車両用レーダ装置の軸ずれ検出装置において、
左右の同一距離に対応する角度検出手段による検出角度φL,φRの差θsを演算する角度差演算手段とを含むことを特徴とする車両用レーダ装置の軸ずれ検出装置。
【請求項2】
車両に設けられ、前方に向けてビームを放射し、被検出物体による反射ビームを受信して、被検出物体との間の距離を、縦の角変位軸線まわりで、予め定める角変位範囲8内のビーム放射方向の予め定める軸線7の少なくとも両側でそれぞれ検出するレーダ装置の軸ずれ検出方法において、
レーダ装置を縦の角変位軸線まわりに、予め定める角変位範囲8内で、かつ、その角変位範囲内のビーム放射方向の予め定める軸線7の少なくとも両側にわたって、角変位駆動し、
レーダ装置の角変位駆動による角度φを検出し、
角度を検出することによって得られる左右の同一距離に対応する検出角度φL,φRの差θsを演算することを特徴とする車両用レーダ装置の軸ずれ検出方法。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2008−261887(P2008−261887A)
【公開日】平成20年10月30日(2008.10.30)
【国際特許分類】
【出願番号】特願2008−201186(P2008−201186)
【出願日】平成20年8月4日(2008.8.4)
【分割の表示】特願平11−351639の分割
【原出願日】平成11年12月10日(1999.12.10)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
【公開日】平成20年10月30日(2008.10.30)
【国際特許分類】
【出願日】平成20年8月4日(2008.8.4)
【分割の表示】特願平11−351639の分割
【原出願日】平成11年12月10日(1999.12.10)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
[ Back to top ]