
Fターム[5J070AC02]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 距離 (2,439)
Fターム[5J070AC02]の下位に属するFターム
Fターム[5J070AC02]に分類される特許
1 - 20 / 2,290
探知測距装置および角度推定方法
追尾装置
目標追尾装置
障害物検出装置
無線機の方位検出装置
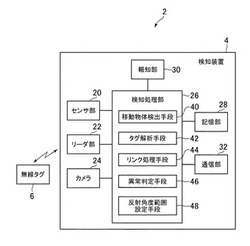
【課題】無線機の方位を電波の到来方向により検出する方位検出装置において、その近傍に反射物体が存在すると、反射波の影響により方位の検出精度が低下する。
【解決手段】記憶部28は電波の反射物体が存在する方位を示す反射角度範囲を記憶する。タグ解析手段42は電波の受信強度のピークに基づいて当該電波の到来方向を判定し無線タグ6の方位を検出する。タグ解析手段42は、受信強度の第1ピークに基づく到来方向が反射角度範囲内である場合には、受信強度の第2ピークに基づく到来方向の検出を試行し、その試行結果に応じて無線タグ6の方位を決定する。
(もっと読む)
動体検知装置

【課題】簡単で小型な構成となり、また回路の精度も重要でなく、占有帯域幅も広くなることなく、動体の存在、位置等を安定して計測できるようにする。
【解決手段】直交ドップラーミキサ16では、対象物9からの受信信号を入力して90度位相の異なるドップラー周波数信号を出力し、計測用ソフトウェア21を用いる演算回路20では、2つのドップラー周波数信号につき、一定時間毎に区切りながら連続して周波数分析を行い、一定時間内のパワースペクトルが最大となる周波数を求め、このパワースペクトル最大の周波数に基づいて計算された速度から一定時間の対象物の移動距離を求めると共に、パワースペクトル最大の周波数の2つのドップラー周波数信号の位相差から対象物の移動方向を求め、この移動方向に対応した正負符号を与えた移動距離を積算することにより対象物の相対位置変化を計測する。
(もっと読む)
レーダ装置
【課題】測距性能および距離分解能の向上を図ると共に、複数目標を目標の対処を可能にするレーダ装置を得る。
【解決手段】目標があらかじめ設定された範囲内の相対速度および相対距離を有し、相対速度を有する目標のPRI内距離のアンビギュィティを解く第1の条件と、相対距離を有する目標のPRI内の距離分解能が、FMレンジング後の距離分解能よりも高精度となる第2の条件とを備えたパラメータを設定し、設定したパラメータに基づき複数のPRIに渡って周波数変調されたキャリア信号に対してPRIでパルス内変調された送信信号を放射する送信機2を備えた。
(もっと読む)
移動物体監視システム
【課題】監視エリアにいる人物と携帯機とを対応付けし、携帯機を持たない不審者を確実に検出する。
【解決手段】移動物体が携帯機を帯同しているか否かを監視する移動物体監視システムであって、センシングにより監視エリアに存在する移動物体の位置情報を検出し、また、携帯機が発した無線信号から当該携帯機の位置情報を検出し、位置情報の一致性に基づいて移動物体と携帯機とを対応付けする。このとき、移動物体の位置情報に応じて、一定判定の基準を異ならせる。これにより、監視エリア内のセキュリティレベルが高い場所ほど厳格な基準で移動物体と携帯機との対応付けがなされ、利便性と安全性を兼ねた高品質な移動物体の識別・監視を行うことができる。
(もっと読む)
追尾装置
【課題】高分解能センサ及び低分解能センサによる航跡に対して正確な割り当てを行うことで、真の目標数分の航跡を生成する。
【解決手段】目標を観測して航跡を生成するセンサ1と、センサ1より低分解能であり、目標を観測して航跡を生成するセンサ2と、センサ1,2により生成された航跡を1対1で割り当てる航跡割当処理部3と、割当結果に応じて、センサ1により生成された航跡を、センサ2により生成された対応する航跡に基づいて更新する第1の航跡更新部5と、割当結果に応じて、センサ1により生成された未割当ての航跡を、センサ2により生成された複数の航跡に基づいて更新する第2の航跡更新部6と、センサ1,2の分解能比に基づいて、第1,2の航跡更新部5,6の動作を制御する分解能比判定処理部4と、更新された航跡を統合する航跡更新統合処理部7とを備えた。
(もっと読む)
レーダ装置及び車両
【課題】設置位置が高い場合であっても、必要な目標物を必要な観測範囲で検出および追尾できるレーダ装置を提供する。
【解決手段】単一または複数の送受信ビームによる広角のカバレッジ面および該カバレッジ面に直交する狭角のカバレッジ面を有し、広角のカバレッジ面を少なくともロール方向に回転させて送信する送受信器20と、送受信器からの送信に応答して該送受信器で受信された信号を処理することにより前方および回転により広角のカバレッジ面が接する側の路面を観測する信号処理器30とを備え、信号処理器は、送受信器からの送信に応答して該送受信器で受信された信号に基づいて広角のカバレッジ面における測距および測角により得られた極座標の信号を直交座標の信号に変換する座標変換部38と、座標変換部において得られた直交座標の信号をロール方向の回転に応じて補正する座標補正部40とを備える。
(もっと読む)
位置情報検知システム
【課題】 時計を搭載しなICタグの位置を、探索するICタグそのものの位置として高い精度で検知することができるようにする。
【解決手段】 リーダライタは、特定のICタグに対して第1情報を受信して第2情報を返信する設定を要求する返信設定要求手段と、前記第1情報を送信して送信時刻を記憶し前記第2情報を受信して受信時刻を記憶する送受信処理手段を有し、ICタグは前記要求に対して前記設定を実行する返信設定実行手段と、前記第1情報を受信して前記第2情報を一定の遅延時間を経て送信する返信処理手段を有し、位置情報処理部は、前記リーダライタの位置と前記送信時刻と前記受信時刻と前記遅延時間とに基づいて前記ICタグの位置を導出する位置導出手段を有する、
ことを特徴とする位置情報検知システム。
(もっと読む)
レーダ画像処理装置
【課題】簡便な方法で目標候補領域と目標モデルとの比較を行うレーダ画像処理装置を得る。
【解決手段】領域判定処理部6が、領域形成処理部5が生成した目標候補領域に外接する外接領域を設定する領域設定処理部7と、領域設定処理部7が設定した外接領域の形状およびサイズから、レーダによる目標候補領域の観測方向を算出し、算出した観測方向から目標物を観測した場合の3次元形状と、目標候補領域の3次元形状とを比較し、目標候補領域が目標物であるか判定する目標判定処理部9とを備える。
(もっと読む)
周辺物体検出装置
【課題】レーダセンサを利用した周辺物体検出において検出性能を向上させる周辺物体検出装置を提供することを課題とする。
【解決手段】レーダセンサを利用し、車両周辺の周辺物体の過去の検出結果と今回の検出結果に基づいて周辺物体を検出する周辺物体検出装置であって、レーダセンサによるセンサ情報に基づいて周辺物体を検知した方向と周辺物体を検知しなかった方向の情報(例えば、周辺物体の存在確率)を取得し、各方向の情報に対して信頼度(例えば、遮蔽由来信頼度)を付与し、各方向の情報と付与した各信頼度に基づいて周辺物体の情報を検出し、特に、周辺物体を検知しなかった方向の情報に付与する信頼度を周辺物体を検知した方向の情報に付与する信頼度よりも低い信頼度とすることを特徴とする。
(もっと読む)
車載用のレーダ装置、車載用のレーダ方法および車載用のレーダプログラム
【課題】方位検出範囲の外に存在する対象物の方位を検出することができる車載用のレーダ装置を提供する。
【解決手段】車載用のレーダ装置は、整数倍の関係にない2種類以上の平均ピッチの受信アレーアンテナを実現する複数の受信アンテナと、前記2種類以上の平均ピッチの受信アレーアンテナのそれぞれによる受信信号について、前記対象物の方位を見かけ上で所定の角度だけ変化させるように位相回転を行い、当該位相回転を行った結果に基づいて前記対象物の方位を検出する方位検出処理を行い、検出された前記対象物の方位が一致すると判定した場合には前記対象物が前記見かけ上で前記方位検出処理における最も狭い方位検出範囲の内に存在すると判定する方位検出部と、を備える。
(もっと読む)
車両用歩行者検知装置、車両用歩行者保護システム
【課題】歩行者をより確実に追尾することが可能な車両用歩行者検知装置等を提供すること。
【解決手段】車両に搭載される車両用歩行者検知装置であって、車両周辺に放射した電磁波が障害物で反射されて前記車両に帰還した反射波を受信する受信手段と、前記受信手段が受信した反射波のデータを格納する記憶手段と、前記記憶手段に格納された反射波のデータを参照して前記反射波の強度の分散を算出し、該算出した反射波の強度の分散が基準値以上である場合に前記障害物が歩行者であると判別し、前記障害物が歩行者であると判別した後、同一の障害物を歩行者とみなして該歩行者の位置に関する情報を出力する制御手段と、を備える車両用歩行者検知装置。
(もっと読む)
レーダ装置
【課題】周波数変調された電磁波を送受信し、その送受信信号に基づいて生成したビート信号を周波数解析することで各種情報を生成するレーダ装置において、ビート信号を生成する機器の有効動作範囲外で発生するノイズの有無を判定できるようにする。
【解決手段】所定の変化率で周波数が変化するレーダ波を送受信する遠距離測定モードでの測定結果からピーク信号成分(遠距離ピーク)を抽出すると共に、遠距離測定モードの場合より大きい変化率で周波数が変化するレーダ波を送受信する近距離測定モードでの測定結果からピーク信号成分(近距離ピーク)を抽出し(S110〜S140)、遠距離ピーク及び近距離ピークの双方に、周波数,信号強度,方位のいずれもが一致するピーク信号成分が存在する場合に、ピーク信号成分の中に妨害波由来ピークが混入しているものと判断する(S150〜S160)。
(もっと読む)
ドップラーレーダシステム、及び物体検知方法
【課題】受信アンテナの増加を抑制しつつ、物体の位置の検出精度を向上する。
【解決手段】本発明に係るドップラーレーダシステム100は、送信アンテナ120と、複数の受信アンテナ121と、目標物体150に含まれる複数の反射点の各々の位置を示す複数の測定点を算出するマイクロドップラー演算部105と、第1間隔を有する第1分割枠を用いて、測定点の第1重心116aを算出する第1重心算出部106aと、第1間隔より狭い第2間隔を有する第2分割枠を用いて、測定点の第2重心116bを算出する第2重心算出部106bと、複数の第2重心116bの中から、第2重心116bと第1重心116aとの位置関係に基づいて、少なくとも1つの第2重心116bを目標物体150の位置に決定する重心決定部107とを備える。
(もっと読む)
車載用のレーダ装置、車載用のレーダ方法および車載用のレーダプログラム
【課題】方位検出範囲の内に存在する対象物が検出されているのか否かを判定することができる車載用のレーダ装置を提供する。
【解決手段】車載用のレーダ装置は、整数倍の関係にない2種類以上の平均ピッチの受信アレーアンテナを実現する複数の受信アンテナと、前記2種類以上の平均ピッチの受信アレーアンテナのそれぞれによる受信信号に基づいて前記対象物の方位を検出する方位検出処理を行い、検出された前記対象物の方位が一致すると判定した場合には当該検出された前記対象物の方位は正しいと判定し、検出された前記対象物の方位が不一致であると判定した場合には当該検出された前記対象物の方位は正しくないと判定する方位検出部と、を備えることを特徴とする。
(もっと読む)
レーダ装置
【課題】DDOA法に基づくレーダ装置においてDOAの不定性を軽減するためのレーダシステムを提供する。
【解決手段】レーダー装置は、距離、方向、速度を記憶するデータ記憶部114と、目標物体150の運動軌跡を予測する追尾予測部115と、レンジの近接を判定し、レンジ制御信号を生成する干渉判定部116と、レンジ制御信号に応じて送信用拡散符号、受信用拡散符号の一方に1チップ未満の位相オフセットを与える符号制御部109と、レンジ制御信号に応じて干渉除去処理を行う干渉分離部110とを備え、干渉分離部110は、レンジ制御信号に応じて、近接する目標物体の当該レンジの信号または当該レンジに隣接するレンジの信号の一方を選択し、距離決定部111、速度検知部112、方向検知部113の入力とする。
(もっと読む)
距離算出システム及び方法、及び接近警報システム及び方法
【課題】電線に対するクレーン等の移動体の距離を算出するシステム及び方法において、電線の種類に関わらず、かつ、大掛かりな設備を要することなく、電線に対する移動体の距離を算出できるようにする。
【解決手段】高圧配電線2と該高圧配電線2に接近するクレーン3等の移動体との距離を算出する距離算出システム11であって、防護管1に、所定の相互間距離をもって取付けられる複数の無線タグ12A、12Bと、前記移動体に保持され複数の無線タグ12A、12Bと交信するリーダ/ライタ20と、複数の無線タグ12A、12Bとリーダ/ライタ20との距離をリーダ/ライタ20の受信電波強度から導出し、該距離と前記所定の相互間距離とに基づいて、高圧配電線2と前記移動体との最短距離を算出する距離算出部とを備える。
(もっと読む)
1 - 20 / 2,290
[ Back to top ]