
Fターム[5J070AC02]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 距離 (2,439)
Fターム[5J070AC02]の下位に属するFターム
Fターム[5J070AC02]に分類される特許
61 - 80 / 2,290
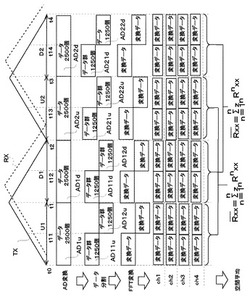
信号処理装置、レーダ装置、および、信号処理方法
【課題】送信波の出力時間を短縮化して物体の角度検出精度を向上させることを目的とする技術に関する。
【解決手段】
ビート信号をAD変換してデジタルデータを導出し、デジタルデータを複数のデータ群に分割する。次に、データ群を高速フーリエ変換してデータ群の数に対応する複数の変換データを取得し、変換データを複数の組に分けて組ごとの相関行列を取得して、相関行列を平均した値を算出する。そして、相関行列を平均した値に基づいて検知点の角度を演算する。これにより、検知点に対応する複数の物体のそれぞれの角度を精度よく検出できる。
(もっと読む)
パッシブレーダ装置

【課題】送信レーダの送信諸元が未知であっても、目標のレンジおよびドップラ周波数の情報を取得することのできるパッシブレーダ装置を得る。
【解決手段】送信レーダ1からの直接波は、直接波受信系である直接波アンテナ3〜A/D変換部5を介して信号処理部101に入力される。目標からの目標反射波は、目標反射波受信系である目標反射波アンテナ3A〜A/D変換部5Aを介して信号処理部101に入力される。信号処理部101では、直接波受信系により観測した直接波観測データから送信レーダの送信信号の未知諸元を推定し、この推定結果と、直接波観測データと目標反射波受信系により観測した目標反射波観測データとに基づいて、目標のレンジおよびドップラ周波数の情報を推定する。
(もっと読む)
船舶用航行支援装置
【課題】衝突の危険性があるとの認識を共有することにより、衝突の危険を回避する行動を適切に行えるようになる船舶用航行支援装置を提供する。
【解決手段】AIS装置4が、GPS情報から自船の位置、針路、速度を測定し、測定された自船の位置、針路、速度を含むAIS情報をAISアンテナ2から送信させる。また、μCOM5は、自船のAIS情報とAISアンテナ2が受信した他船のAIS情報から自船及び他船の衝突確率を算出し、閾値以上のときにその旨を警報すると共に、その旨を示す警報信号をAISアンテナ2から他船に送信させる。
(もっと読む)
ターゲット識別システム
【課題】簡易な構成でありながら正確にターゲットである例えば人の移動軌跡を追跡するなどのターゲット識別をすることができるターゲット識別システムを提供すること。
【解決手段】送信アンテナTAの各素子アンテナから、互いに直交する信号を送信し、ターゲットで反射して帰ってくる信号を受信アンテナRAで受信して、整合フィルタによって、互いに直交する信号を分離することによって空間バーチャルアレーSVAを構成し、異なる時間に得られる信号について、ターゲットの移動に伴う位相ズレを補償することによって仮想的に位置がズレている素子アンテナの信号として得ることによって時間バーチャルアレーTVAを構成する。これによって、実質的に素子アンテナの数を増やし、開口長を拡大することができる。
(もっと読む)
無線測距装置、無線端末及び無線測距システム
【課題】折り返しパルスの受信レベルが高速に大きく変動する環境においても、適切な利得によって折り返しパルスを受信し、正確に測距する無線測距システムを提供する。
【解決手段】リーダ制御部25は、タグ−リーダ間の距離を検出するために、送信電力、受信ゲインおよび自折り返しパルスの送信レベルの組合せを周期的に切り替える。第1の組合せでは、リーダ制御部25は、送信電力、受信ゲイン、自折り返しパルスの送信レベルをそれぞれ「小」、「小」、「大」に設定する。この場合、タグAとタグBでは、リーダ5からの送信パルスの受信レベルが第1の閾値より小さいので、折り返し送信しない。タグCでは、送信パルスの受信レベルが第1の閾値より大きいので、折り返し送信する。第2の組合せでは、リーダ制御部25は、送信電力、受信ゲイン、自折り返しパルスの送信レベルをそれぞれ「中」、「中」、「中」に設定する。
(もっと読む)
対象の一つ以上の運動パラメータを得るための計算機、システム、方法およびコンピュータ・プログラム
【課題】前方散乱レーダーを使用して、飛行する対象の距離パラメータまたは速度を含む対象の軌道を決定する。
【解決手段】対象の運動パラメータ26を得るための計算機20であって、計算機20は、少なくとも2つの時間差で一つ以上の運動パラメータ26を得るように構成される。第1の時間差は対象による送受信機ラインの第1の組の通過のタイミングを示し、第2の時間差は対象による送受信機ラインの第2の組の通過のタイミングを示し、送受信機ラインの第2の組は送受信機ラインの第1の組とは異なる。
(もっと読む)
目標物管理装置および目標物管理方法
【課題】目標物の誤検出を抑止するとともに、センサの数を抑えて目標物の数を効率よく管理する目標物管理装置および目標物管理方法を提供する。
【解決手段】監視対象範囲に対応する地図情報の2つ以上の座標により表される複数の経路と、経路が接続する点を表す分岐点とを関連付け、センサ各々が探知した1つ以上の目標物の座標を、複数の経路のいずれかに関連付ける分配部と、1回目の走査時に探知した分岐点に関連付けられている経路各々の目標物の数と、2回目の走査時に探知した経路各々の目標物の数とを用いて、経路各々の目標物の数の増減値を算出し、経路各々の目標物の数の増減値から分岐点ごとに、経路各々に関連付けられている目標物の数の増加数または減少数を求める増減算出部と、増加数または減少数を、前回更新部で求めた経路の目標物の数に加えて今回の該経路の目標物の数とする更新部と、を備える目標物管理装置である。
(もっと読む)
車両用移動物体検出装置
【課題】自車両周辺における移動物体の移動状態ならびに移動量の認識精度を向上した車両用移動物体検出装置を提供することことを課題とする。
【解決手段】移動遷移状態把握部13によって、自車両の移動量に基づいて回避対象物体の特徴点位置の移動遷移状態を算出し、回避対象物体の特徴点位置の移動遷移状態に基づいて、回避対象物体の移動を認識する。また、移動量算出部19によって、回避対象物体における特徴点位置の移動遷移状態に基づいて、自車両に対する回避対象物体の相対的な移動量を算出し、回避対象物体の移動遷移状態を認識する処理周期と比較して十分に長い周期で回避対象物体の移動量を算出する。
(もっと読む)
レーダ装置
【課題】少ない演算量で、目標の3次元速度ベクトルを推定することができるレーダ装置を得ることを目的とする。
【解決手段】目標信号検出手段により検出された目標信号のうち、送受信局00及び受信局01,02,10,11の中で基準となる局により受信されたパルスから検出された目標信号と基準局以外の局により受信されたパルスから検出された目標信号との位相差の変化率を算出する位相差変化率算出手段とを設け、速度ベクトル算出手段が、位相差変化率算出手段により算出された位相差の変化率が、目標のクロスレンジ方向の速度に比例するものとして、その位相差の変化率から目標の速度ベクトルの推定値を算出する。
(もっと読む)
レーダ装置及び目標位置算出方法
【課題】レーダ装置により算出される目標位置観測値のバタつきを抑制し、目標追尾処理を安定化させること。
【解決手段】本発明に係るレーダ装置(1)は、データ生成部(30)と、目標検出部(42)と、目標距離算出部(43)とを備える。データ生成部(30)は、追尾目標から受信した反射波に関するデータ(DA)を、レンジビン毎に生成する。目標検出部(42)は、距離ゲート(RG)内においてデータ(DA)が閾値レベル(TH)以上であるレンジビンの集合、あるいは、レンジビンの集合に振幅レベルが閾値レベル(TH)未満であるレンジビンがあるものの当該レンジビンの数や幅(隣接レンジビンの振幅レベルが閾値レベル(TH)未満であるレンジビンの数)が規定を満足しており集合と認められるものを、追尾目標に対応する目標レンジビン集合(TBG)として抽出する。目標距離算出部(43)は、目標レンジビン集合(TBG)に属する全レンジビンが示すそれぞれの距離の平均値を、追尾目標への距離である目標距離(R)として算出する。
(もっと読む)
車両周辺監視装置
【課題】車両周辺の監視領域に存在する対象物を少なくともレーダ装置により検知する場合に、監視領域に存在する個々の対象物の検知の信頼性を高めることができる車両周辺監視装置を提供する。
【解決手段】レーダ装置2よりレーダ電波の走査を行なう車両周辺の監視領域を車載カメラ3により撮像し、撮像画像の色情報又は輝度情報に基づいて、監視領域におけるレーダ電波の反射率の分布を反射率推定手段5により推定する。レーダ電波の反射波に受信強度に対する閾値(監視領域の各局所に対応する閾値)を、受信強度閾値設定手段6により、推定した反射率の分布に応じて設定する。対象物認識手段7は、少なくとも前記反射波の受信強度と前記設定された閾値との比較に基づいて前記監視領域に存在する対象物を検知する。
(もっと読む)
3次元デジタル記録システム
【課題】構造物表面の不良箇所を3次元のデジタルデータとして記録する。
【解決手段】本発明に係る3次元デジタル記録システムは、構造物表面の不良箇所に接触している間パルス波を送信する入力装置10と、前記入力装置10からのパルス波を受信すると、パルス波を送信する3個の距離測定装置20と、を備え、前記入力装置10は、前記入力装置10がパルス波を送信した時間と、前記3個の距離測定装置20の各々からのパルス波を受信した時間との差から、前記入力装置10と前記3個の距離測定装置20の各々との距離を算出し、前記距離から前記入力装置10の位置情報を算出する制御部15と、前記位置情報を記憶するメモリ13と、を有する。
(もっと読む)
アンテナ装置、レーダ装置、及び誘電体部材の配置方法
【課題】複数の誘電体を備えたアンテナ装置であって、誘電体同士の境界を波源とするサイドローブの影響を抑えた構成を提供する。
【解決手段】アンテナ装置は、放射部と、誘電体部16,17,18,19と、を備える。放射部は、電磁波を放射する。誘電体部16,17,18,19は、放射部の電磁波放射側に配置され、放射部の長手方向に並べられた複数の誘電体部材で構成される。誘電体部16,17,18,19の長手方向中央部を通るように当該長手方向に垂直に引いた仮想線Sを対称軸として、放射部の長手方向に並べられた複数の誘電体部材の境界位置が非対称である。
(もっと読む)
探知測距装置および探知測距方法
【課題】センサアレーを用いて到来方向推定を行い、さらに複数の送信センサを用いて実効開口を拡大する探知測距装置において、スイッチの切り替えによる時分割処理の弊害をなくし、高精度の測定を可能とする。
【解決手段】変調器161,162において互いに直交する符号を用いて送信波を拡散し、送信用センサAT1,AT2から放射する。受信用センサAR1〜ARNで受信された信号のそれぞれを分岐器241,242で2分岐し、そのそれぞれについて復調器2611〜262Nにおいて送信側で用いた符号と同じ符号により逆拡散する。
(もっと読む)
信号検出装置、信号検出方法及び信号検出プログラム
【課題】S/Nの低い受信信号であっても、検出漏れや誤判定の発生を抑制することができ、確信度がある程度ある目標があった場合に、追尾が継続しやすくなる追尾処理部を備える信号検出装置の提供。
【解決手段】音波や電磁波を発信し、目標からの反響信号の受信信号を所定の区間切り出して反響信号のスペクトルに変換した上で特徴抽出を行いパターン認識用のパターンを生成する前処理部と、入力されたパターンをあらかじめ学習されたSVM(サポートベクターマシーン)により、目標らしさを判定し、その出力を正規化し確信度として出力するパターン認識部と、確信度を閾値判定し、検出ありと判定された場合は、目標の方位距離やS/Nなどの検出目標に関わる情報を算出する目標情報算出部と、追尾処理に位置情報以外のSVMなどのパターン認識処理自体の出力値である確信度値を活用した追尾処理部を備える。
(もっと読む)
目標追尾装置
【課題】PRI内距離を目標の運動諸元の推定処理に利用できるようにして、目標の運動諸元の推定精度を高めることができる目標追尾装置を得ることを目的とする。
【解決手段】PRI内距離ゲート内外判定部14によりゲート内にあると判定されたPRI内距離毎に推定値の仮説を生成して、その仮説の信頼度を算出し、1以上の仮説の中で、信頼度が高い仮説を採択する推定値仮説生成部15や、推定値仮説生成部15により採択された仮説に係るPRI内距離を用いて、現時点での運動諸元の推定値を更新するPRI内距離フィルタ処理部16などを備える。
(もっと読む)
検出装置及び検出方法
【課題】本発明は従来よりも設計の自由度を向上させた等価時間サンプリング方式の検出装置を提供する。
【解決手段】送信手段(20)は、各送信パルスが所定の送信パルス繰り返し周期内に配置されるパルス列信号であって、各送信パルスの位相を当該送信パルス繰り返し周期内において段階的にシフトした送信パルス列信号を検出波として送出する。受信手段(30)は、反射波を受信して受信パルス列信号を形成し、受信パルス列信号をサンプリングして複数の受信パルスの波形データを出力する。信号処理手段(40)は、複数の受信パルスの各波形データの時間軸を各送信パルスの位相の段階的シフトに対応して調整し、各波形データを合成して一つの受信パルスの波形データを形成する。
(もっと読む)
後側方障害物検知装置
【課題】自車両が低速で走行する場合であっても、非報知対象物であるガードレール等の静止物が、報知対象物である他車両等の移動物として検知されることを防止することが可能な後側方障害物検知装置を提供する。
【解決手段】自車両の後側方領域内の対象物の存在を検知する後側方障害物検知装置であって、対象物を非報知対象物と報知対象物に分類する対象物分類部と、自車両の走行速度に応じて、対象物を非報知対象物に分類する条件を制御する非報知対象物分類条件制御部とを備える。
(もっと読む)
信号生成回路、レーダー装置
【課題】低雑音で高周波数精度かつ高線形なFMCW信号を得ることのできる信号生成回路、レーダー装置を提供する。
【解決手段】アナログ制御信号により発振信号の周波数が制御される発振器を有している信号生成回路は、発振信号の位相情報を検出してディジタルの位相情報を出力するディジタル位相検出部と、ディジタルの位相情報を微分してディジタルの周波数情報を出力する第1の微分部と、発振周波数を設定する周波数設定コードとディジタルの周波数情報とを比較してディジタルの周波数誤差情報を出力する比較部と、ディジタルの周波数誤差情報の高周波成分を除去するローパスフィルタ部とを備えている。さらに、高周波成分が除去されたディジタルの周波数誤差情報をアナログの周波数誤差情報に変換するD/A変換部と、アナログの周波数誤差情報を積分してアナログの位相誤差情報に変換しアナログ制御信号として出力する積分器とを備えている。
(もっと読む)
電磁波計測装置、電磁波計測システムおよび電磁波計測方法ならびに構造体の外形状設計方法
【課題】近傍界にて計測した電磁波散乱データを用いて遠方界での電磁波散乱を精度良く評価できる電磁波計測装置を提供する。
【解決手段】電波吸収材4を備えた筐体3と、筐体3内に設けられ、縮小模型とされた航空機模型15が設置される計測領域11に球面波電磁波を送信するとともに散乱波を受信するNFアンテナ5と、筐体3内に設けられ、球面波電磁波を波電磁波に変換するコンパクトレンジ9を備え、変換された波電磁波を計測領域11に送信するとともに散乱波を受信するFFアンテナ7と、NFアンテナ5によって得られた計測データを、FFアンテナ7によって得られた計測データと対比可能なデータに変換するデータ変換手段を備えている。
(もっと読む)
61 - 80 / 2,290
[ Back to top ]