
Fターム[5J070AC02]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 距離 (2,439)
Fターム[5J070AC02]の下位に属するFターム
Fターム[5J070AC02]に分類される特許
2,061 - 2,080 / 2,290
距離測定装置

【課題】 距離測定の精度を向上させた距離測定装置を提供する。
【解決手段】 測距ユニット100−1は、測距対象物400までの距離を測定するものであって、インパルスを発生するインパルス発生回路106と、このインパルスを送信する送信アンテナ112と、送信アンテナ112から送信されて測距対象物400で反射したインパルスの反射信号と、送信アンテナ112から送信されたインパルスの漏洩信号とを受信する受信アンテナ114と、反射信号と漏洩信号との時間差に基づいて、対象物までの距離を算出するコントローラ102とを有する。
(もっと読む)
レーダ装置

【課題】 透過窓部への異物の付着を低減もしくは防止することのできるレーダ装置を提供すること。
【解決手段】 レーダ装置100において、透過窓部41の外部表面への異物の付着を低減若しくは防止する付着防止手段として、車両前方に開口する導入口50aと透過窓部41の外部表面の周縁領域に開口する排出口50bとを有し、排出口50bの断面積が導入口50aの断面積よりも小さいエアダクト50を、レーザ光及びその反射光を妨げず、且つ、排出口50bから排出された空気が透過窓部41の外部表面に供給されるように設けた。従って、車両が走行すると、導入口50aを介してエアダクト50内に空気が流入し、流入した空気は圧力が高められて(流速を増して)排出口50bから排出され、透過窓部41の外部表面全面に沿って勢い良く流れるので、透過窓部41に付着している異物及び/又は付着しようとする異物を効率良く吹き飛ばすことができる。
(もっと読む)
車両用センサシステム及び方法
【課題】目標パラメータを効率的に決定して動作速度を上げ、計算経費を最小にし、RF放出を低減する車両検知システムの提供。
【解決手段】物体の目標パラメータを決定する方法は、(a)一連の射程距離から目標射程距離を定める工程と、(b)初期ドエル時間に目標射程距離にドエルしてセンサデータを得る工程と、(c)目標射程距離での物体の有無の確率密度分布に基づいて、センサデータが目標射程距離での物体ありに対応するか、物体なしに対応するかを決定する工程と、決定できない場合は決定できるまで工程(b)及び工程(c)を繰返し、(d)センサデータが工程(c)で決定した物体の存在に対応する場合、延長ドエル時間で目標射程距離にドエルし、工程(e)に進む前に物体の目標パラメータを決定する追加センサデータを得る工程と、(e)工程(b)〜工程(e)を繰り返す前に、目標射程距離として次の一連の射程距離を定める工程とを具備する。
(もっと読む)
レーダ装置
【課題】移動物体の高精度な距離情報の取得を可能にするレーダ装置を提供する。
【解決手段】レーダ装置は、レーダパルス送信手段1と、レーダパルス受信手段2と、受信した複数のレーダパルスを積分検波することによりこれらを複数のレーダパルス応答信号に変換するレーダパルス送受信制御手段3と、複数のレーダパルス応答信号の各々について時間的に隣接するものの間の差分に基づく信号を抽出することにより各々が移動物体の信号成分からなる複数のレーダパルス応答差分信号を検出する移動物体検出手段4と、複数のレーダパルス応答差分信号の各々についてリンギングを用いて移動物体の粗い位置を検出する移動物体粗位置検出手段5と、検出された移動物体の粗い位置に基づいて予め定められた規則に従って移動物体の正確な位置を検出する移動物体精位置検出手段6とを備える。
(もっと読む)
物体検出方法及び装置
【課題】検出された物体が交通弱者のような特定物体かどうかを、当該物体が遠方に在る場合にも、正確、且つ確実に精度良く識別し得るようにした物体検出方法及び装置を提供する。
【解決手段】パルスレーザ光が照射されて所定の走査領域を走査し、光反射物体から反射光として戻ってくるまでの時間tを基に光反射物体までの距離Lを求めると共に、光反射物体からの反射光を基に求めた反射光強度H及び距離Lを基に検出した物体データの点群のうちに、最大反射光強度値Hmaxが、基準距離Loと基準反射光強度Hoから定まる反射光強度閾値HL以上のものがある場合に、当該物体データは視覚障害者や車椅子両者等の特定物体であると判定する。
(もっと読む)
パルス変調回路
【課題】本発明は、増幅器に入力されるRF信号のバイアス回路への漏洩を抑えると共に、パルス幅の狭いDCパルス信号を増幅器に印加することができるパルス変調回路を提供することを目的とする。
【解決手段】この発明のパルス変調回路は、DC電源とDCバイアス端子との間に、DCパルス信号によりスイッチング動作をするスイッチング手段と、DCパルス信号のパルス幅の逆数に相当する周波数を通過域とする低域通過フィルタとをこの順で配設すると共に、DC電源とスイッチング手段との間に、増幅器に入力されるRF信号の周波数、及び、スイッチング手段に印加されるDCパルス信号のパルス幅の逆数に相当する周波数の各周波数において、スイッチング手段よりDC電源側のインピーダンスを零とみなせる容量値を有するコンデンサを配設したことを特徴とする。
(もっと読む)
飛行時間決定装置及び方法
第1及び第2装置(7,8)は、無線で信号を送受信し、第1及び第2クロックをそれぞれ、信号送信時間及び信号到達時間を決定するために有する。第1装置は第1及び第2信号(9,10)を送信し、第2装置は第3信号(11)を送信する。遅延を第1信号に導入することにより、泥棒は、それらの装置が実際より近いと考えるように装置をだますことができる可能性がある。遅延が第1信号に導入されたかどうかを特定するように支援するように、第1装置は、第1及び第2クロックについてクロックレートの比を演算し、演算された比が所定範囲に入るかどうかを決定する。  (もっと読む)
(もっと読む)
車両の走行制御装置
【課題】 自車の前方に存在する複数の物体が不適切に統合されるのを防止して車両制御を的確に行えるようにする。
【解決手段】 レーダー装置で自車Vaの前方の物体T1…を検知し、所定範囲内に存在する複数の物体T1〜T5を統合して大型車両Vbに対応する目標物体Taとする。目標物体Taの代表位置から3m以上前方に離れており、かつ代表位置の左端点から0.8m以上左方(推定軌跡に近づく方向)に離れており、かつ自車Vaから前方50m以内にあり、かつ自車Vaの推定軌跡内に含まれる領域に物体T5が存在すれば、その物体T5を小型車両Vcに対応する目標物体Tbとして元の目標物体Taから分離する。そして目標物体Tbに基づいて自車Vaの走行状態を制御することにより、自車Vaの推定軌跡内に存在する小型車両Vcに対して適切に制御できる。
(もっと読む)
人体形状測定方法とその装置
本発明は、人体形状測定装置に関するものであり、人体に沿ってホーンアンテナを昇降させ、人体表面の測定点に向けて十数GHz程度のマイクロ波を周波数を変化させながら放射して、人体からの反射波と進行波との定在波を検出し、フーリエ変換信号のピークから人体との距離を測定する。
人体測定対象の点以外からの反射波により人体までの距離検出の精度が低下することを防止するため、人体形状の概略データを求めるための手段を設けると共に、トラッキング手段では概略データから所定の変化内で、かつ以前の測定点に対して求めた人体との距離から所定の範囲内のものをフーリエ変換信号から抽出して、人体との距離を求める。 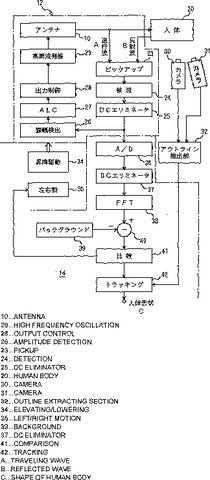 (もっと読む)
(もっと読む)
2つの無線通信装置間の距離を測定する方法およびその方法を実施するように適合された装置
本発明は、2つの無線通信装置(1、2)の間の距離を測定する方法に関し、無線信号の交換遅延を測定することにある。本発明によれば、各信号の伝搬時間は交換遅延から計算され、続いて、2つの装置の間で伝送される単一のチャネル測定フレームの分析を使用して補正される。補正された伝搬時間は、無線信号がたどる最短の伝搬経路に対応する。無線伝送媒体の構成の大部分では、補正された伝搬時間は、2つの装置(1、2)を隔てる距離の直線上の測定値である。 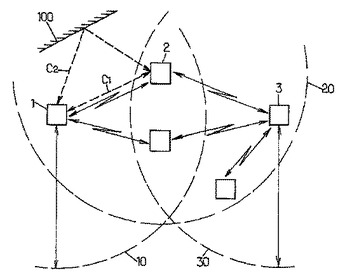 (もっと読む)
(もっと読む)
速度センサおよびそれを用いた対地車速センサ
【課題】検知誤差を低減した高精度な速度センサを実現すること。
【解決手段】センサ回路部3により電磁波を生成し送信アンテナから放射する。さらに、受信アンテナにより地面からの反射波を受信し、混合器により局部信号と混合することで低周波信号を生成する。センサ回路部3から放射された電磁波は、誘電体レンズ2によりビームを成型した後、地面に照射するが、このとき、ビーム形状4はセンサ近傍のビーム幅に対して、地面近傍のビーム幅が小さくなる形状にする。
(もっと読む)
レーダ装置
本発明は、目標から到来した信号を処理することによって、この目標との相対距離を求めるレーダ装置に関する。本発明の目的は、受信系の帯域がその信号の占有帯域より狭い帯域に制限された場合であっても、目標の広範な相対距離を精度よく求めることができることを目的とする。このために、本発明にかかわるレーダ装置は、第一のパルスで変調された波動信号に対する応答として目標から到来した信号を復調して第二のパルスを生成し、かつ時間軸上の既定の間隔で第一のパルスがとり得る2つの瞬時値の比である標準値に対して、この第二のパルスがその間隔でとる瞬時値の比の偏差の絶対値が最小となる2つの異なる時点を特定すると共に、時間軸上で波動信号が送信された基準の時点と、特定された2つの異なる時点の一方、またはこれらの時点の近傍の時点との差として、目標との相対距離を評価することによって達成される。  (もっと読む)
(もっと読む)
距離指示システムおよび方法
距離指示システムには、電磁波(CWV)を送出するトランシーバ(100)と、該トランシーバとの間に距離(DST)を有し前記電磁波を受信するトランスポンダ(400)とが含まれる。前記トランスポンダは、前記トランシーバと該トランスポンダの間の距離に応じて、前記電磁波に変調を誘導するよう構成する。さらに、方法(700)を開示する。 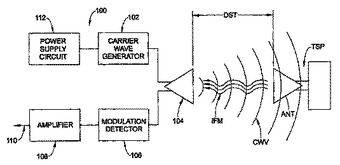 (もっと読む)
(もっと読む)
物体検出装置、物体検出方法、物体検出プログラム、距離センサ
観測対象空間に存在する少なくとも1つの物体を検出する物体検出装置であって、検出対象物体の形状を表す画像である物体モデルを算出して記録する物体モデル記録部3と、一度に観測対象空間の全体をカバーするミリ波を照射し、物体候補の距離の算出を行うミリ波距離センサ1と、視点の異なる特徴画像と距離画像を算出するステレオ画像センサ2と、物体候補を選択する制御部7と、物体モデルから照合モデルを算出するモデル変換部4と、特徴画像と距離画像から照合画像を抽出する照合画像抽出部5と、照合モデルと照合画像の類似度を算出し、最大類似度が所定の範囲内となった場合、照合画像の座標と物体候補の距離から前記物体の3次元位置を算出し、前記物体の3次元位置を外部へ出力する類似度照合部6とを備えてなる。 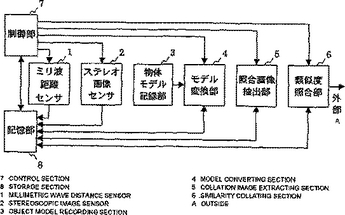 (もっと読む)
(もっと読む)
レーダ装置
【課題】 距離の曖昧さが原因で生じる2次エコーを抑圧して探知性能を高めることができるレーダ装置を得ることを目的とする。
【解決手段】 長パルスBに係るビデオ信号に孤立波形が含まれているか否かを判定し、孤立波形が含まれていなければ、その長パルスBに係るビデオ信号に対する圧縮処理を実施し、孤立波形が含まれていれば、その長パルスBに係るビデオ信号から孤立波形を除去して、除去後のビデオ信号に対する圧縮処理を実施する。これにより、距離の曖昧さが原因で生じる2次エコーを抑圧して探知性能を高めることができる。
(もっと読む)
距離測定方法とその装置
本発明は、人体形状の測定などの距離測定装置に関するものであり、人体に沿ってホーンアンテナを昇降させ、十数GHz程度のマイクロ波を周波数を変化させながら放射し、人体からの反射波と進行波との定在波を検出し、DC成分を除去した信号に対してフーリエ変換を行い、人体までの距離を算出する。
高精度に距離測定を行うため、検出した定在波の強度がほぼ一定となるように発信源にフィードバックを行う。  (もっと読む)
(もっと読む)
合成開口を用いた無線ベースの位置決定システム
本発明は、移動局および少なくとも1つの位置固定局を有する無線ベースの位置決定システムの測定精度を高める方法に関する。本発明の特徴は、
− スタート位置から出発した上記の移動局の運動を絶対センサシステムおよび相対センサシステムの測定データによって検出し、
− この測定データを用いて開口合成の形態で仮想アンテナを形成し、
− この開口合成を使用することによって、前記の移動局を位置固定局に、および/またはこの逆に互いに焦点合わせすることである。  (もっと読む)
(もっと読む)
レーダー装置
【課題】車載用等のレーダー装置は、数十cmから数十mまでの短距離の範囲で対象物を検知する必要があることから、対象物からの反射波がレーダー装置の前面のケースにより再反射され、再度対象物によって反射され、レーダー装置で二次エコーとして受信されてしまうという問題がある。上記問題に対して、本発明は、多重反射を防止して近距離にある対象物までの距離を正確に測定することのできるレーダー装置を提供することを目的とする。
【解決手段】本願発明に係るレーダー装置は、送信用アンテナ及び受信用アンテナの周囲に設けられた枠体の表面を、送信用アンテナの送信波を放射する方向に対象物からの反射波が戻らないようにする。
(もっと読む)
干渉型レーダー
【課題】一般のレーダーと異なり、送信信号はパルスではなく、CWまたはFMCW信号であるため、レーダー用ではない一般通信用の送信モジュールを使用することができる。
【解決手段】目標対象物に向けて信号を送信する送信部Tと、目標対象物で反射する反射波を受信する受信部Rとを有している。前記送信部Tは、目標対象物の方位及び速度を検出するためのCW信号を送信アンテナ7から出力する。前記受信部Rは、前記送信部Tからの送信と同時に、目標対象物で反射した反射波を複数台の受信アンテナ8で受信し、受信信号に対してスペクトル解析を行い速度成分ごとの受信信号に分類する機能と、受信アンテナ系統の信号間の相関する機能と、前記相関処理された信号を積分する機能と、受信アンテナ間の信号の位相差からアンテナ面に入射する信号の位相面を求めて、その出力を2次元FFTしてターゲットの方位方向及び速度を計測する機能とを実行する。
(もっと読む)
環境評価用赤外線画像作成装置及び環境評価用赤外線画像作成方法、環境評価用レーダ検出結果作成装置及び環境評価用レーダ検出結果作成方法、道路環境評価用データ作成装置及び道路環境評価用データ作成方法
【課題】 複雑な物体が存在する道路環境であっても、正確に物体や風景の存在を赤外画像等によって仮想的に表現する。
【解決手段】
仮想的な道路環境評価用赤外画像を作成するに際し、道路環境に存在しうる物体ごとに、物体の形状、物体から放射される赤外エネルギ及び物体の材質に応じた放射率を記述した物体データベースから読み出し処理を行って物体を配置して道路環境を構築すると共に(S1)、当該道路環境内における赤外画像の撮像面を定義し(S2)、構築された道路環境の大気状態に応じた赤外エネルギの減衰率を算出し(S3,S4)、算出された赤外エネルギの減衰率、撮像面に対する各物体の角度及び距離、各物体の赤外エネルギ及び放射率に基づいて、各物体の赤外エネルギが、赤外画像の撮像面の各画素に達する赤外エネルギを算出して(S5)、当該各画素の赤外エネルギの値を画素値に透視変換して(S6)、赤外画像を作成する(S7)。
(もっと読む)
2,061 - 2,080 / 2,290
[ Back to top ]