
Fターム[5J070AC02]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 距離 (2,439)
Fターム[5J070AC02]の下位に属するFターム
Fターム[5J070AC02]に分類される特許
2,041 - 2,060 / 2,290
運転支援装置
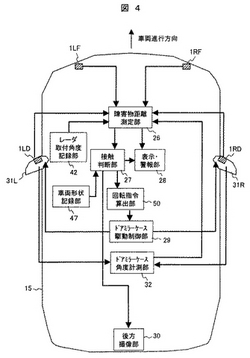
【課題】 車両にレーダ装置を設置し、自車に接近する危険度の高いターゲットを見失うことなく追尾して警報し、確実にドライバーをサポートする運転支援装置を提供する。
【解決手段】 水平方向に回転する折りたたみ機構を有するドアミラーケース31L,31Rの内部にレーダ1LD,1RDを設置し、ドアミラーケース31L,31Rの折りたたみ機構を利用して回転させる。これにより、危険度の高いターゲット6をできるだけ長い時間観測し、ドライバーに警報・表示を行う。また、レーダの検出結果から、前方には、自車15が通り抜ける幅がないと判断した場合には、車両後方を視野とする撮像装置を起動し、ドライバーに対して後方の映像を表示して、後退時の後方認知の支援を行う。
(もっと読む)
自動吐水制御装置

【課題】 如何なる方向から移動してくる物体であっても、その有無を正確に検知して吐水のオン/オフ制御が行え、物体の誤検知による誤作動を防止できるようにする。
【解決手段】 コントローラ部は、マイクロ波センサ5から出力されるドップラ信号に基づいて、手が所定空間領域に進入したか否か判断し、手が存在すると判断したら、電磁バルブ開の制御信号を出力することにより吐水口3cを通じて水を吐水させる。電波ビームの放射方向が放射方向11にスキャニングされている状態で、センサ5から対象物検知信号が出力されると、その対象物を洗浄のため吐水口3cの略直下の空間領域に向かって進入しようとする手であると判別し、吐水口3cが現在吐水中であれば吐水を継続すべく、未だ吐水を行っていなければ吐水を開始すべく、電磁バルブに制御信号を出力する。
(もっと読む)
2周波CWレーダ
【課題】2周波CWレーダと回転支持機構との結合態様を工夫して、静止物体も測距可能な回転走査型2周波CWレーダを簡素な構成で実現する。
【解決手段】同一方向を向いた送信アンテナ34及び受信アンテナ35と、周波数f1,f2の異なる連続波をアンテナ34から空中へ出射する送信部31〜33と、アンテナ35で受信した反射波からドップラー低周波信号fd1,fd2 を検出する受信部36〜37と、その低周波信号から位相差Δφを検出して反射物までの距離Rを算出する信号処理部61と、アンテナ34,35を搭載して軸回転する回転支持機構63とを備え、その搭載がアンテナ34の出射中心線67と回転支持機構63の回転軸42とをねじれの位置の直線にする状態でなされる。
(もっと読む)
物体の内部構造を測定する方法および装置
物体の表面からの反射によって生じる信号アーチファクトを低減するためのさまざまな方法および装置を説明する。1つの方法においては、信号アーチファクトを低減するための校正信号を類似経路アルゴリズムを用いて作成する。別の方法においては、信号アーチファクトを低減するための校正信号を等価位置アルゴリズムを用いて作成し、別の方法においては、遮断スクリーンを表面に接触または近接させて配置する。別の方法においては、反射防止層を使用する。これらの方法は、乳房腫瘍造影デバイスにおいて単独で、または一緒に使用しうる。 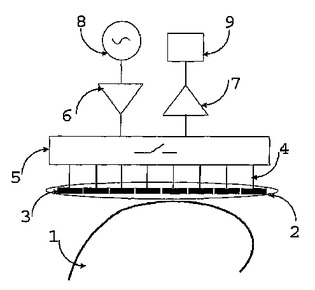 (もっと読む)
(もっと読む)
車両用障害物検知装置
【課題】車両の運転者の運転により役立てることができる車両用障害物検知装置を提供する。
【解決手段】車両の4隅近傍に配置された超音波センサ4FL,4FR,4RL,4RRと信号送受信部11と位置検知部12とで障害物位置検出手段を構成している。接触判断手段たる接触予測部15は、位置検知部12による現時点の障害物の検出位置と進行軌跡予測部14により予測された車両1の進行軌跡とに基づいて車両1と障害物との接触可能性を判断し、上記障害物位置検出手段により相対位置が検出された障害物Bとの接触可能性が有ると判断したときと、上記障害物位置検出手段により相対位置が検出された障害物Bとの接触可能性が無いと判断したときとで表示器6の表示およびブザー5による警報音の周波数をそれぞれ変化させる。
(もっと読む)
誘導弾システム
【課題】 妨害波を発射しながら進入する航空機等の目標に対して、システム規模を増大させることなく、かつ1つの射撃単位のシステム構成で対処する誘導弾システムを得る。
【解決手段】 射撃統制装置2内のレーダ波送受信部(1)21からのレーダ波により対象目標を探知し、その目標情報を信号処理部22で取得し、さらに目標位置予測部23を設けて、目標情報から対象目標の位置を得る。そして、対象目標からレーダ波に対する妨害波が発射され目標情報の取得が妨害されている状況では、妨害波の到来角度情報を継続して取得し、これを既に妨害波のない状況で取得済みの位置に対する予測処理のパラメータとして適用することによって、継続的に対象目標の位置を得る。
(もっと読む)
ガードビームを有する車輌レーダーシステム
第一のアンテナ(22)及びガードアンテナ(24)を備えた車輌(16)中の予測衝突レーダーシステム(10)であって、放射パターン(44、46)がオーバーラップしており、ガードアンテナ(24)の放射パターン(44)は第一のアンテナ(22)の放射パターンよりも広い。第一のアンテナ及びガードアンテナからの信号の比較(718,120)が車輌(16)の脅威となりそうでない標的の除外を提供する。第一のアンテナ(22)の第一の実施例はマルチビームアンテナ(22.1、22.2)であって、電磁レンズ(40、56)が例えば誘電体(40、40.1)または平面(56)であって、前方放射エレメント(58)からの信号が、それらと整列したガードアンテナ(24)からの信号と比較される。他の実施例では、電磁レンズ(70)は、ガードアンテナ(24)と協働して放射パターン(44.1’)の方向を変化させる。  (もっと読む)
(もっと読む)
二次監視レーダ制御装置及び二次監視レーダ制御方法
【課題】航空機を確実に捕捉可能な二次監視レーダ制御装置及び二次監視レーダ制御方法を提供する。
【解決手段】 航空機の未来位置範囲が所定の切替値以下である場合、質問信号の単位時間あたりの送信回数を定めた送信回数基準値に則り質問信号を送信させ、未来位置範囲が基準値以上である場合、基準値に定められた値より減じた回数で質問信号を送信させる送信制御部91を設ける。
(もっと読む)
ミキサーおよびそれを用いた高周波送受信器ならびにレーダ装置、レーダ装置搭載車両およびレーダ装置搭載小型船舶
【課題】 出力を向上させることができるミキサーを提供すること。
【解決手段】 2つの高周波用伝送線路1,2の中途P11,P21を電磁結合させ、高周波用伝送線路1,2の端部に高周波検波用素子を設けた基板3,4を配置したバランス型ミキサーにおいて、高周波用伝送線路1,2の一方の高周波検波用素子P12から中途P11までの線路長と、他方の高周波検波用素子P22から中途P21までの線路長との線路長差Dを、一方の高周波検波用素子P12に入射する高周波信号と他方の高周波検波用素子P22に入射する高周波信号との位相差をδとしたときに、位相差δがδ=π/2となるように設定したミキサーである。中途P11,P21で位相が変化しても双方の高周波検波用素子P12,P22に高周波信号が丁度同位相で入射するため、バランス型ミキサーにおいて入射する2つの高周波信号間の高調波成分を最小として、その不要なノイズとしての高調波成分を抑制することができるので、受信感度を向上させることができる。
(もっと読む)
降雨強度と雨水量の3次元分布推定装置および方法
【課題】降雨強度及び雨水量の3次元分布の推定精度を高める。
【解決手段】マルチパラメータレーダにより得られる比偏波間位相差KDP、反射因子差ZDR、反射因子ZH に基づき降雨強度の推定式、雨水量の推定式を用い、地上付近の気温t0 、観測仰角θ、標準大気の気温減率Γ(=0.065℃/m)よりレンジ方向の温度プロファイルt(r,θ)を計算し、温度依存性と仰角依存性を考慮した各前記推定式の係数とべき指数ai (i=1,2)、ai'(i=1,2)、bi (i=1,2)、bi'(i=1,2)、ci (i=1,2,3)、ci'(i=1,2,3)、di (i=1,2,3)、di'(i=1,2,3)を用いて降雨強度と雨水量の3次元分布を推定する。
(もっと読む)
マイクロ波送受信器及び距離計
【課題】 マイクロ波として回転波を使用して検出精度を高めるとともに、マイクロ波送信プローブからマイクロ波受信プローブへの直接入射、並びに受信波による送信波への影響を排除したマイクロ波送受信器、並びに前記マイクロ波送受信器を備え、より高精度で信頼性の高い距離計を提供する。
【解決手段】 導波管内に、マイクロ波の進行方向に沿ってマイクロ波送信プローブとマイクロ波受信プローブとを所定距離離間して直交配置し、かつ、アンテナの前に円偏波器を付設してなるマイクロ波送受信器、並びに前記マイクロ波送受信器を備え、一方向に回転する電界分布を有するマイクロ波回転波を前記アンテナから送信し、前記被検出物体で反射され、電界分布の回転方向が反転したマイクロ波回転波を受信する距離計。
(もっと読む)
誘導弾システム
【課題】 ホバリング中のヘリコプタに対しても効果的に対処できる、電波センサを用いた誘導弾システムを得る。
【解決手段】 電波センサとして、要撃管制装置1側に送受信部(1)11及び信号処理部(1)12を、また誘導弾側に送受信部(2)21及び信号処理部(2)22をそれぞれ備え、これら電波センサにより回転翼を有する対象目標を検出し、その目標情報を取得する。また、要撃管制装置1側での要撃計算の結果として対象目標との予想会合点とともに、所定のホーミング時間が確保された上方円弧状の飛翔経路情報、及びゲインを算出し、これらを誘導弾2側に指示する。さらに、誘導弾2におけるホーミング誘導計算の実行時には、操舵量に対するゲインとして、要撃管制装置1側で取得したゲインと誘導弾2側で取得したゲインとを相補的に適用し、対象目標への誘導接近中における良好な誘導精度を維持する。
(もっと読む)
無線局間距離測定方式
【課題】限られた周波数帯域において,しかも単調な周期性信号を使って,移動局と固定局の間,あるいは移動局間の相対的距離を電波で直接測定することを可能とする。
【解決手段】無線局1の送信手段103が第1の波と第2の波を無線局2に送信し,無線局2の周波数位相シフト手段202が,受信したそれぞれの波の周波数と位相をシフトして第3の波と第4の波を生成し,送信手段203がそれぞれの波を無線局1に送信する。無線局1の周波数位相シフト手段105が,受信した第3の波と第4の波から第5の波を生成する。ここでクロック信号発生手段107が第1の波と第2の波から生成した第6の波と同期したクロック信号を生成し,このクロック信号によって動作するフィルタ108を用いて第5の波を抽出する。測定手段106が第5の波と第6の波の位相差に基づいて,無線局1と無線局2の間の電波の伝搬時間を測定する。
(もっと読む)
到来時刻推定装置
【課題】 受信信号と参照信号の周波数が一致していない場合でも、電波の到来時刻を推定できるようにする。
【解決手段】 受信信号サンプリング部1により受信された信号の時間波形から共分散行列を生成する受信信号共分散行列計算部2と、空間に周期的に発信された信号の時間波形から到来時刻と周波数シフト量の関数であるモードベクトルを計算するモードベクトル計算部3とを設け、その受信信号共分散行列計算部2により計算された共分散行列とモードベクトル計算部3により計算されたモードベクトルを用いてMUSIC処理を実施することにより、受信信号サンプリング部1により受信された信号の到来時刻を推定する。
(もっと読む)
送受信器
【課題】レーダで主流となるパルススイッチとホモダイン検波の組み合わせにおいて、キャリア信号のリークを低減した送信器を提供する。また、バイポーラパルスをデジタル回路で正確かつ迅速に受信できる受信器を提供する。
【解決手段】本発明の送受信器は、デジタル回路部2、送信回路部3、送信アンテナ4、受信回路部5、受信アンテナ6、及び高周波発信器7から構成される。送信回路部3は、内部にミキサ12とスイッチ13を有している。スイッチ13を開閉することでキャリア信号8の漏れを抑制している。受信回路部5は、IQ復調器31、2つを1組とした2組のAD変換器37,38と39、40、及び遅延時間設定部41、42からなる。各々2つずつのAD変換器でバイポーラパルスのI成分52及びQ成分53をサンプリングさせるようにしている。
(もっと読む)
車載用レーダ
【課題】広い角度範囲での対象物検知に対して高速の信号処理が可能な車載用レーダを提供すること。
【解決手段】車載用レーダは、電磁波を放射する送信アンテナ1と、対象物によって反射された上記電磁波を受信する2個の受信アンテナ2a,2bと、送信アンテナと2個の受信アンテナとが面上に配置されたアンテナ板3とを備える。更に、2個の受信アンテナが並ぶ方向を方位方向としたときに、方位方向にアンテナ板を回転することによって2個の受信アンテナにより形成される検知角を走査する駆動部4を備える。駆動部は、走査と走査の間に回転を停止する静止時間を設ける。車載用レーダは、更に、2個の受信アンテナから出力される受信信号と静止中のアンテナ板の回転角とから、静止時間において対象物の基準方向に対する方位角を検出する信号処理部13を備える。
(もっと読む)
車両の障害物検知装置
【課題】 障害物検知装置のエイミングに係る作業性を向上させる。
【解決手段】 車両周辺の障害物を検知するためのレーダユニットとしてのミリ波レーダ(2)はバンパ部材(4)の最先端部分よりも内側にレイアウトされており、このミリ波レーダ(2)の軸線を調整するエイミング機構の調整部が、延長部材としてのエクステンションワイヤ10あるいは11を介して、バンパ(4)の表部分まで延設される。
(もっと読む)
レーダ装置
【課題】 車両前方において広範囲での電波の送受信を可能にするとともに、加飾性に優れるレーダ部を備えるレーダ装置を提供することを目的とする。
【解決手段】 車両前部に設置され車両前方における電波の送受信を行うレーダ装置において、レーダ本体1の送受信部を車両後方に向けて設置するとともに、後方に設置した反射板2により反射させた電波を車両前方に向けて発信するように構成したことにより、後方に向けた送受信部を有するレーダ本体1によって、車両前方において広範囲での電波の送受信を可能にするとともに、車両前方を向いたレーダ本体1の背面等に加飾5を施すことが可能になり、車体前部の見栄えを向上させることができる。
(もっと読む)
レーダ信号処理装置
【課題】 船舶などの目標を正確に検出することができるレーダ信号処理装置を得ることを目的とする。
【解決手段】 ASDEから出力されたレーダビデオのスレッショルドレベルを算出し、そのスレッショルドレベルより大きい振幅を有するレーダビデオを検知するヒット検定処理部6を設け、ヒット検定処理部6により検知されたレーダビデオに含まれているクラッタを縮小化する収縮処理を実施し、収縮処理後のレーダビデオに対する2次元移動平均処理を実施してノイズレベルを算出し、そのレーダビデオとノイズレベルを比較して目標とクラッタを区別する。
(もっと読む)
距離測定装置
【課題】 距離測定の精度を向上させた距離測定装置を提供する。
【解決手段】 測距ユニット100−1は、測距対象物400までの距離を測定するものであって、インパルスを発生するインパルス発生回路106と、このインパルスを送信する送信アンテナ112と、送信アンテナ112から送信されて測距対象物400で反射したインパルスの反射信号と、送信アンテナ112から送信されたインパルスの漏洩信号とを受信する受信アンテナ114と、反射信号と漏洩信号との時間差に基づいて、対象物までの距離を算出するコントローラ102とを有する。
(もっと読む)
2,041 - 2,060 / 2,290
[ Back to top ]