
Fターム[5J070AC02]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 距離 (2,439)
Fターム[5J070AC02]の下位に属するFターム
Fターム[5J070AC02]に分類される特許
2,021 - 2,040 / 2,290
車載レーダ装置

【課題】 電波をレーダ波とするレーダ装置において、路側物の検出を精度を向上させる。
【解決手段】 信号解析処理でのFFT処理結果に基づいて生成した受信ベクトルX(k)をユニタリ変換し、そのユニタリ変換された受信ベクトルY(k)に基づき、次式を用いて、過去の受信ベクトルを反映し、且つユニタリ変換された相関行列Ryy(k)を生成する(S210〜S240)。
Ryy(k)=α・Ryy(k−1)+(1−α)・Y(k)YH(k)
この相関行列Ryy(k)に基づいて生成したMUSICスペクトラムから静止物標に対応する候補点を抽出し、この候補点と、虚像を発生させる原因となった物標に対応する重要候補点とを用いてハフ変換を行うことで、路側物の配列状態を検出する(S250〜S320)。
(もっと読む)
高周波送受信器およびそれを具備するレーダ装置ならびにそれを搭載したレーダ装置搭載車両およびレーダ装置搭載小型船舶

【課題】 送信用高周波信号をスイッチングする過渡的な状態においてノイズを含む不要な中間周波信号が受信系に出力されるのを良好に遮断できるようにすること。
【解決手段】 高周波発振器1と切替えRFスイッチ8’および第2の切替えRFスイッチ8”と送受信アンテナ5とミキサー6と増幅器7とを設けた高周波送受信器において、増幅器7の電源路に接続された、開状態で増幅器7の電源を遮断し、送信用高周波信号RFtが非出力状態で安定したときに閉状態となって増幅器7の電源を投入するスイッチ7a,7bとを備えている高周波送受信器である。ミキサー6に混入した送信用高周波信号RFtによるノイズを含む中間周波信号がミキサー6の後段に漏れることがなく、所望の中間周波信号を出力させることができる。
(もっと読む)
ビーコン受信機及びビュアーシステム
【課題】 ビーコン送信機を持った被写体を探すために、受信装置を見たり、双眼鏡を見たりする煩わしさを解消することができるビーコン受信機及びビュアーシステムを提供する。
【解決手段】 ビーコン受信機は、ビーコン受信部11Aがビーコン電波を受信して複数の方向の電波強度を検出すると、判定部21が検出された電波強度データに基づいて電波強度が最大の方向を判定して最大の電波強度とその方向を含むビーコン受信情報を出力し、情報可視化部15はビーコン受信情報を入力して可視化する一方、風景取り込み部13が所定の被写体の画像を取り込むと、重畳部14が情報可視化部で可視化されたビーコン受信情報と風景取り込み部で取り込まれた画像情報とを重畳し、ビュアー部12は重畳された情報を表示するように構成されている。ビュアーシステムはビーコン送信機と上記のビーコン受信機とでシステムを構成したものである。
(もっと読む)
誘導装置
【課題】 従来は、目標に向け電波を送信し、目標から直接反射信号を受信して目標信号を検出し追尾しており、目標からの反射波が海面や地表面等のクラッタ信号の受信時、目標方向と異なる方向に目標がいると認識しマルチパスを追尾し、誤ロックしていた。
【解決手段】 従来、単一偏波での送受信を行っていたが、本方式は、水平偏波による送受信(HH信号)と垂直偏波による送受信(VV信号)の2種類の偏波方式での送受信方式とした。目標からの直接反射波と、海面や地表面を経由するクラッタ反射波(マルチパス)では、HH信号とVV信号で位相差が180度ずれる。この位相差を用いて信号処理することにより、目標からの直接反射信号とクラッタ反射波(マルチパス)を分離し、クラッタ反射波(マルチパス)の影響を受けずに目標に追尾し、ロックオンを保持することが可能になる。
(もっと読む)
FM−CWレーダ装置および同装置のノイズ抑制方法
【課題】FM−CWレーダ装置において、複数の装置間の電波干渉によって発生するスパイク状のノイズ成分を効果的に抑止すること。
【解決手段】連続波に周波数変調を施したFM−CW信号を送信信号として用い、受信信号と送信信号との差信号であるビート信号に基づいて目標物の相対距離、相対速度および方位の1つ以上を出力するFM−CWレーダ装置において、ビート信号をディジタル変換したディジタルビート信号に含まれるスパイク状のノイズ成分を抑制するためのスパイクノイズ抑制手段が具備され、このスパイクノイズ抑制手段によって、ディジタルビート信号の時系列データ上の一のデータと当該一のデータの直前データとの差分出力データに基づいてディジタルビート信号にスパイク状のノイズ成分が含まれているか否かが判定される。
(もっと読む)
ネットワークレーダシステム
【課題】 従来のネットワークレーダシステムでは複数レーダを管理・制御する為に中央処理系の存在を前提としていた。この為、1箇所の中央処理装置の過負荷による性能劣化と機器障害によるダウン、また当該中央処理系に繋がるデータ伝送回線へのデータ集中度が各レーダ装置とを結ぶ他のデータ伝送回線に比し高く、システム全体としてバランスに欠け、ネットワーク障害に対する脆弱性の問題があった。
【解決手段】 レーダ装置10に複数レーダ管理制御サブシステム20を付置し、また各種のデータを表示する表示装置22とデータ蓄積装置23が接続される。これら一連のシステムによりレーダサブシステム200を構成し、通信制御装置30を介してネットワーク60へ接続し、これらレーダサブシステム200の集合体がネットワークレーダシステム100を構成する。さらに、隣接レーダサブシステム同士をネットワーク予備回線50で接続した。
(もっと読む)
車両用障害物検知装置
【課題】車両用障害物検知装置を提供することである。
【解決手段】本発明による車両用障害物検知装置は、周辺の障害物を検知するためのレーダーユニットが車両の前端部に搭載され、前記レーダーユニットの軸線を調整するためのエイミング機構の調整部が、前記レーダーユニットから延びる運動伝達部材を介してフロントグリルの上端部近くに配置されたことを特徴とする。
(もっと読む)
未知の障害物の中の予測不可能な目標物の実時間追跡
本発明の実施例は、環境内の障害物の配置についての事前の知識を必要とせず、ロボットが追跡する目標物の軌跡も知らずに、障害物のある環境内で動作する移動ロボットの運動を計算するための計画を提供する。本発明の実施例は、目標物の位置と環境内の障害物の位置の測定結果に基づいて、監視ロボットの運動を支配するアルゴリズムを提供する。アルゴリズムは目標物と障害物によって作られた監視者の視野領域との間の幾何学的配置を計算によって記述し、この記述を用いて連続的な制御則を計算する。本発明の実施例は、逃走経路ツリーデータ構造を使用して目標物の監視ロボット検出器からの逃走について起こり得るモードを分類し、逃走経路ツリーを用いて目標物の最短逃走経路を決定する。  (もっと読む)
(もっと読む)
障害物検出装置
【課題】障害物検出装置での障害物検出処理において、演算オーバーヘッドの増大を抑制するとともに、歩行者などの障害物の誤検出や未検出の件数を効果的に削減すること。
【解決手段】 検出結果照合手段160は、距離・方位・相対速度検出手段150の検出結果と立体物検出手段110の検出結果との間で矛盾があった場合に、適応制御の実行指令を発行する制御手段を備えている。即ち、検出結果照合手段160は、その適応制御の実行指令を意味するフィードバック信号S1を検出範囲限定手段141とビーム方向・形状演算手段142に出力する。ビーム方向・形状演算手段142は、ミリ波レーダを構成する各個別アンテナの各受信信号の重み係数Am (複素数;1≦m≦M)を立体物検出手段110の検出結果に適応させて変更する。レーダービーム制御122は与えられた重み係数Am に基づいて各方向毎の探索データ(受信信号)に関する総和を生成する。
(もっと読む)
物体認識装置及び方法
【課題】 少ない演算量で、被検出対象のデータが混在しても安定して物体の形状を認識することができる物体認識方法、及びこの方法を用いた物体認識装置を提供する。
【解決手段】 移動体周辺に存在する物体を認識する物体認識装置であって、物体の表面形状情報を検出する物体検出手段1と、物体の輪郭形状を認識する形状認識手段2と、を備え、この形状認識手段2は、表面形状情報を構成する標本群から任意に抽出した標本に基づいて定めた形状モデルに対する標本群の一致度を演算して前記輪郭形状を認識する。
(もっと読む)
パルスレーダ装置
【課題】 状況に応じた最適な測定範囲、および障害物の検出分解能を得ることのできるパルスレーダ装置を提供すること。
【解決手段】 クロック信号遅延分割回路2は、クロック信号発生部1によって生成されたクロック信号に基づいて、クロック信号を任意の時間だけ遅延させた1以上の遅延クロック信号を合成して成るクロック信号列を生成する。送信パルス生成部3は、クロック信号に基づいて送信パルスを生成するとともに、クロック信号遅延分割回路2で生成されたクロック信号列に基づいてレプリカパルスを生成する。相関部7は、電波受信部5によって受信される反射波とレプリカパルスとの相関演算を行う。信号処理部9は、クロック信号遅延分割回路2を制御して、クロック信号列を構成する遅延クロック信号の数、および各遅延クロック信号の遅延量を変化させる。
(もっと読む)
物体認識装置
【課題】 少ない演算量で、非検出対象のデータが混在しても安定して移動体周辺の物体の形状を認識することができ、両者の配置関係を求めて、この配置関係を良好に報知することのできる物体認識装置を提供する。
【解決手段】 移動体周辺に存在する物体を認識する物体認識装置であって、物体の表面形状情報を検出する物体検出手段1と、表面形状情報を構成する標本群から任意に抽出した標本に基づいて定めた形状モデルに対する標本群の一致度を演算して前記物体の輪郭形状を認識する形状認識手段2と、物体検出手段1及び形状認識手段2の検出及び認識結果に基づいて、移動体と物体との相対的な配置関係を演算する相対配置演算手段3と、この相対配置演算手段3の演算結果に基づいて、配置関係についてディスプレイへの表示又は音声により報知する報知手段5と、を備える。
(もっと読む)
合成開口処理システムにおけるプラットフォーム動揺補正方法
【課題】 精度が足りず不正確な位置情報を用いても、有効に合成開口処理システムにおけるプラットフォームの動揺補正を行えるようにする。
【解決手段】 プラットフォームの位置情報を周波数解析する段階、周波数解析結果に基づいてプラットフォームの仮想位置情報を生成する段階、生成した仮想位置情報に基づいて信号を切り出す段階、切り出した信号に基づいて合成開口処理する段階からなるものである。
(もっと読む)
レーダー装置
【課題】本願発明は、受信アンテナの受信する受信信号が小さくても大きくても、対象物から反射した受信信号を誤動作することなく正常に受信できるレーダー装置を提供することを目的とする。
【解決手段】上記目的を達成するために、本願発明は、受信回路を2系統備え、受信アンテナの受信する受信信号が小さいときは、受信アンテナから導波路を介して接続された受信回路で受信し、受信信号が大きいときは、受信アンテナから導波路を経て、当該導波路に結合されたカプラを介して接続された受信回路で受信する。具体的には、本願発明は、受信アンテナから導波路を介して接続された第一の受信回路と、前記導波路からカプラを介して接続された第二の受信回路と、を備えたレーダー装置である。
(もっと読む)
車両の赤外線撮影表示装置及び赤外線撮影表示方法
【課題】複雑で処理負担の大きな画像処理等を施すことなく安価に、ドライバが車外物体に気づき易い注意喚起効果の高い赤外線撮影画像の表示が行えるようにし、その際、対向車のドライバが幻惑されたり、パッシングと誤認されたりすることがなく、表示範囲が自車前方に限られることもないようにする。
【解決手段】赤外線投光器2a、2bから車外に赤外光を投光し、撮像装置3で撮影した車外の赤外線撮影画像をHUD6に表示する際に、赤外線撮影画像の車外物体の画像部分を物体検出手段52により検出し、この検出に基き、投光調整手段53により赤外線投光器2a、2bの投光状態を調整して赤外線撮影画像の明るさを変化し、安価にドライバが車外物体に気づき易い注意喚起効果の高い赤外線撮影画像の表示を行う。
(もっと読む)
自動車用レーダーシステム
レーダーセンサ(10)と、車両の周囲にある対象の距離(D)と相対速度(V)を測定する評価装置(12)と、測定された距離と相対速度を用いて差し迫った衝突を認識して、予測される衝突時点(Tc)と衝突速度(Vc)に関するデータをプリクラッシュシステム(20)へ供給する衝突認識装置(18)とを有する自動車用レーダーシステムは、レーダーセンサ(10)が、衝突認識装置(18)によって速度測定モード(CW)へ切り替え可能であって、速度測定モードにおいて相対速度(V)のより正確な測定が行われることを特徴とする。 (もっと読む)
チャープ信号を用いて送受信機間の電磁波多重経路特性に対するチャネル推定方法およびチャネル推定装置
【解決手段】(a)チャープ−偏移−変調信号のアップ−チャープ信号部分とダウン−チャープ信号部分のそれぞれに対して多重経路の距離差に起因した個別周波数成分の和を出力するステップと、(b)個別周波数成分の和のアップ−チャープ信号部分とダウン−チャープ信号部分のそれぞれの出力を互いに掛けて偏差周波数出力を計算するステップと、(c)偏差周波数出力を用いて個別周波数成分の和の周波数偏差の補正を遂行して周波数補正出力を生成するステップと、(d)発生するチャープ−偏移−変調信号間の不連続性に対する補正を周波数補正出力に遂行して不連続性が補正された不連続補正出力を生成するステップと、(e)周波数分析方法を適用して不連続補正出力を個別多重経路信号に分解するステップと、(f)多重経路チャネルによる減衰成分と時間遅延成分を抽出するステップとを含むチャネル推定方法が提供される。 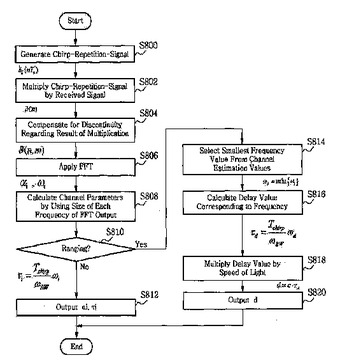 (もっと読む)
(もっと読む)
無線センシング装置及び無線センシング方法
【課題】 車載レーダ等の各種センシング装置において、コストの上昇及び消費電力の増大を低く抑えながらも距離精度を高めることができると共にセンシング距離を長くすることができるようにする。
【解決手段】 無線周波数帯の信号を発振する発振器101を間欠的且つ発振動作期間を変えて発振動作させ、発振動作期間の信号を送信アンテナ503より空中へ放射すると共に、空中へ放射した送信波が被測定物1000を反射して戻ってくる反射波を受信アンテナ504にて受信し、受信した反射後と先に送信した送信波とに基づいて被測定物1000に対する距離を求める。これにより、送信ピーク電力を高くすることなく近距離における高い距離分解能の無線センシングと遠距離の無線センシングの性能を実現することが可能となる。
(もっと読む)
レーダ装置
【課題】ウェーブレット変換処理を利用する場合に、目標信号のレンジセル上の広がりが極めて小さくなる目標を容易に検出する。
【解決手段】レンジ分解能が許容される範囲で目標検出性能を重視して、パルス圧縮回路11でパルス圧縮する際に、パラメータ制御回路17でパルス圧縮用のウェイトを制御して圧縮後のパルス幅を広げ、目標信号のレンジセルのポイント数を増加させ、ウェーブレット変換回路12によりウェーブレット変換し、展開係数選定回路13で所定の展開係数を選定し、逆ウェーブレット変換回路14により逆ウェーブレット変換し、CFAR回路15によりCFAR処理し、目標検出回路16で規定された閾値との比較判定により目標を検出する。
(もっと読む)
自動吐水制御装置
【課題】 如何なる方向から移動してくる物体であっても、その有無を正確に検知して吐水のオン/オフ制御が行え、物体の誤検知による誤作動を防止できるようにする。
【解決手段】 コントローラ部は、マイクロ波センサ5から出力されるドップラ信号に基づいて、手が所定空間領域に進入したか否か判断し、手が存在すると判断したら、電磁バルブ開の制御信号を出力することにより吐水口3cを通じて水を吐水させる。電波ビームの放射方向が放射方向11にスキャニングされている状態で、センサ5から対象物検知信号が出力されると、その対象物を洗浄のため吐水口3cの略直下の空間領域に向かって進入しようとする手であると判別し、吐水口3cが現在吐水中であれば吐水を継続すべく、未だ吐水を行っていなければ吐水を開始すべく、電磁バルブに制御信号を出力する。
(もっと読む)
2,021 - 2,040 / 2,290
[ Back to top ]