
Fターム[5J070AC02]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 距離 (2,439)
Fターム[5J070AC02]の下位に属するFターム
Fターム[5J070AC02]に分類される特許
1,941 - 1,960 / 2,290
地中探査装置
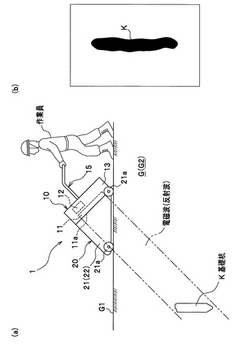
【課題】 電磁波を用いて地上から地中を探査したときに、探査対象物の埋没状態を詳しく検知することができる地中探査装置を提供することを課題とする。
【解決手段】 地上から地中G2を探査するための地中探査装置1であって、電磁波を地面G1に対して斜めに送信するとともに、地中G2で反射した電磁波を受信するアンテナ部11を備えている。
(もっと読む)
物体検出装置

【課題】 2つの検出手段のうちの一方の検出手段で物体を検出できない場合でも検出対象の物体を設定することができる物体検出装置を提供することを課題とする。
【解決手段】 レーダによる情報と画像による情報に基づいて物体を検出する物体検出装置1であって、レーダによって物体を検出するレーダ検出手段2と、画像によって物体を検出する画像検出手段3と、レーダ検出手段2によって検出した物体の位置情報と画像検出手段3によって検出した物体の位置情報に基づいてレーダ検出手段2によって検出した物体と画像検出手段3によって検出した物体とが同一物体か否かを判断する判断手段8とを備え、2つの検出手段2,3の一方の検出手段で過去に同一物体と判断した物体を検出できない場合、当該過去に同一物体と判断した物体に設定された情報から求めた予測移動軌跡と他方の検出手段で検出した物体の位置情報とに基づいて同一物体か否かを判断することを特徴とする。
(もっと読む)
車両用物体検出装置
【課題】 アレーアンテナを用いて高精度に物体を検出できる領域が拡張された車両用物体検出装置を提供すること。
【解決手段】 車両に搭載され、自車両周辺の物体(移動体又は停止物)を検出する車両用物体検出装置に、第一の領域においては第一の精度で物体を検出し、第一の領域とは異なる第二の領域においては第一の精度よりも低い第二の精度で物体を検出する1以上の検出器から成る物体検出手段と、物体検出手段により第一の領域内の複数の場所でそれぞれ検出された複数の物体相対位置に基づいて物体のその後の相対移動軌跡を推定する軌跡推定手段と、物体検出手段により第二の領域内で検出された物体相対位置と軌跡推定手段により推定された物体の推定相対移動軌跡とが重なったとき、第二の領域内で検出された物体相対位置を第二の精度より高い第三の精度で検出されたものとみなす精度補正手段とを備える。第三の精度は、例えば、第一の精度と等しい。
(もっと読む)
情報処理装置、管理システム、情報処理装置の制御方法、情報処理装置の制御プログラム、および情報処理装置の制御プログラムを記録した記録媒体
【課題】 所定位置を通過するRFIDタグの順番を精度よく特定することができる情報処理装置を実現することにある。
【解決手段】 本発明の管理装置10は、ゲートを通過する各RFIDタグ1の位置をそれぞれ算出するリーダライタ2から情報を受付け処理するものであり、リーダライタ2から、算出されたRFIDタグ1の距離情報をそれぞれ受付ける外部通信部11と、この外部通信部11によって受付けた距離情報それぞれを比較し、RFIDタグ1のゲートにおける通過順を特定する順序決定部15とを備えている。このため、ゲートにおけるRFIDタグ1の通過順を精度よく特定することができる。
(もっと読む)
車両の距離測定システムの距離測定データを評価するための方法および装置
本発明は、車両の距離測定装置の距離測定データを評価する方法に関する。車両の、観察される周囲環境のカメラ画像(100)を得て、距離測定装置によって、観察される同じ周囲環境から、距離測定データを得る。カメラ画像(100)を表示装置に表示し、距離測定データに従って、距離情報(1a´,1b´,2´)をカメラ画像(100)に統合する。本発明によれば、車両の経路(4a,4b)を確定し、場合に応じて、カメラ画像(100)に統合する。 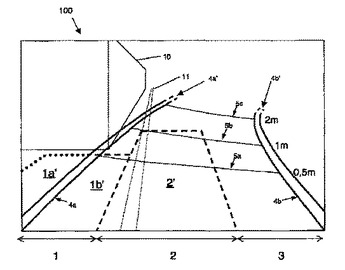 (もっと読む)
(もっと読む)
物体検出装置
【課題】 物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】 レーダによる情報と画像による情報に基づいて物体を検出する物体検出装置1であって、レーダによって物体を検出するレーダ検出手段2と、画像によって物体を検出する画像検出手段3と、レーダ検出手段2によって検出した物体の位置情報と画像検出手段3によって検出した物体の位置情報に基づいて、レーダ検出手段2によって検出した物体と画像検出手段3によって検出した物体が同一物体か否かを判断する判断手段10とを備え、判断手段10は、画像検出手段3によって検出した物体に対してレーダ検出手段2によって検出した物体が複数個対応している場合、当該複数個の物体のうち車両中心の推測走行軌跡に近い物体を同一物体と判断することを特徴とする。
(もっと読む)
変調信号発生回路、送受信モジュール、およびレーダ装置
【課題】 VCOの出力周波数の温度ドリフトが大きく、法定周波数範囲内で所定のFM変調波を得るためには、変調直線性を得るための変調補正電圧を温度毎に設定する必要があり、膨大な補正電圧データと試験、調整時間を要していた。
【解決手段】 周波数補償電圧によりVCOの周波数温度ドリフトを補償し、温度に依存しない一定のDC成分を持つ変調電圧によりFM動作させることにより、温度による変調感度の変動を低減し、出力信号の変調直線性を得るための変調補正電圧の温度データを大幅に簡素化し、試験、調整時間を大幅に削減することができる。
(もっと読む)
防犯センサ
【課題】 風による草木などの揺れや接近する昆虫などの影響によって内蔵するマイクロウエーブセンサが影響を受けて誤報が発生することを極力回避し、動作の信頼性を高めることが可能な防犯センサを提供する。
【解決手段】 検知エリアに向けて周波数の異なる複数のマイクロ波を送信し、それぞれの反射波に基づいてこの検知エリア内の検知対象物体の有無を示す反射波検知信号S1を出力するとともに、その検知対象物体までの距離情報Vdを出力するマイクロウエーブセンサ1と、距離情報Vdに基づいてその検知対象物体までの距離が所定距離以上か否かを判定する距離判定手段102と、その検知対象物体までの距離が前記所定距離以上で、かつ、反射波検知信号S1が検知対象物体の存在を示しているときのみ警告信号Dout1を出力するように制御する警告信号出力制御手段104とを備える。
(もっと読む)
リモートコントロールシステム
【課題】低消費電力で動作するリモートコントロールシステムを得ること。
【解決手段】固定配置される情報処理装置と、情報処理装置へ指示情報を送出して情報処理装置を遠隔操作するリモートコントローラ10とを有するリモートコントロールシステムにおいて、リモートコントローラ10は、情報処理装置からの距離を装置間情報として算出するための赤外線信号を情報処理装置に送出する赤外線LED16と、情報処理装置が赤外線信号を受信した際に情報処理装置から送出される超音波信号を受信する超音波センサ11と、赤外線LED16が赤外線信号を送出してから超音波センサが超音波信号を受信するまでの時間、赤外線信号および超音波信号の伝播速度に基づいて装置間情報を算出する算出部19と、赤外線LED16が赤外線信号を送出する際の送信電力を装置間情報に基づいて制御する制御部14と、を備える。
(もっと読む)
物体検出装置
【課題】 物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】 レーダによる情報と画像による情報に基づいて物体を検出する物体検出装置1であって、レーダによって物体を検出するレーダ検出手段2と、画像によって物体を検出する画像検出手段3と、レーダ検出手段2によって検出した物体の位置情報と画像検出手段3によって検出した物体の位置情報との関係が判断基準を満たしている場合にレーダ検出手段2によって検出した物体と画像検出手段3によって検出した物体とが同一物体と判断する判断手段8とを備え、物体までの距離が長い場合には判断基準を同一物体と判断し易くなるように変更することを特徴とする。
(もっと読む)
物体検出装置
【課題】 検出した物体に高精度な情報を設定できる物体検出装置を提供することを課題とする。
【解決手段】 レーダによる情報と画像による情報に基づいて物体を検出する物体検出装置1であって、レーダによって物体を検出するレーダ検出手段2と、画像によって物体を検出する画像検出手段3と、レーダ検出手段2によって検出した物体の位置情報と画像検出手段3によって検出した物体の位置情報に基づいて、レーダ検出手段2によって検出した物体と画像検出手段3によって検出した物体とが同一物体か否かを判断する判断手段8とを備え、判断手段8で同一物体と判断した物体については、レーダ検出手段2によって検出した当該物体の横方向のデータと画像検出手段3によって検出した当該物体の横方向のデータとの位置関係に基づいて横幅及び/又は横位置の設定方法を変更することを特徴とする。
(もっと読む)
車両用レーダ装置
【課題】 レドーム又はレーダカバーへの汚れの付着を適切に判定する機能を備えた車両用レーダ装置を提供すること。
【解決手段】 車両に搭載される車両用レーダ装置が、所定の角度範囲を電子的又は機械的に走査し、受信レベルの走査角度プロファイル(走査角度変化に対する受信レベル変化)を作成するプロファイル作成手段と、プロファイル作成手段により作成された受信レベルの走査角度プロファイルのピークの鋭さに基づいて(レドームやレーダカバーへの)汚れ付着の有無を判定する汚れ判定手段とを備える。汚れ判定手段は、走査角度プロファイルのピークの鋭さが所定の閾値を下回ったときに汚れが付着していると判定する。汚れ判定手段は、例えば、走査角度プロファイルのピークから所定量低い受信レベルが検出された2つの走査角度間の角度幅が所定の角度幅より広いときに、走査角度プロファイルのピークが上記所定の閾値を下回ったと判定する。
(もっと読む)
フィルタ装置
【課題】サイドローブフリー(ゼロサイドローブ)を実現できるとともに、フィルタの信号損失を最小とすることができるフィルタ装置を提供する。
【解決手段】主ローブの中心周波数およびその近傍の一部周波数を除いて、その外側の全ての周波数入力に対するサイドローブ出力をゼロとし、同時に主ローブの中心周波数に対する出力S/Nを最大とするような窓関数を算出し、該算出された窓関数に基づき重みベクトルを算出するフィルタ係数演算部30と、このフィルタ係数演算部で算出された重みベクトルをフィルタ係数として受信信号をフィルタリングするFIRフィルタから成るフィルタ部40とを備える。
(もっと読む)
車載用レーダ装置
【課題】 走行区画に存在する目標物を精度良く検出することの出来る車載用レーダ装置の提供
【解決手段】自車両15前方に向けて扇形の走査範囲RGに渡り送信信号OSを一定の送信周期で電磁波として放射する送信アンテナ3、放射された電磁波が目標物で反射された反射波を受信して受信信号RSを出力する複数の受信用アンテナ5、受信信号と送信信号から周波数複素振幅スペクトルを演算するスペクトル演算手段9、自車両の進行方向RDを演算取得する進行方向演算取得手段11、取得された進行方向に基づいて、周波数複素振幅スペクトルの、進行方向に対応する方向成分を演算抽出しその演算結果データを出力する進行方向成分抽出手段10、演算結果データに基づいて自車両の距離方位スペクトルを演算する距離方位スペクトル演算手段12、演算された距離方位スペクトルに基づいて、自車両の前方の目標物を検出する目標物検出部13を有して構成される。
(もっと読む)
アンテナ取付構造
【課題】 電波の送受波を行うアンテナの開口を対象に向けられて、アンテナの基端付近に設けられた取付フランジが被取付部に固定されるアンテナ取付構造において、簡単に延長パイプを取り付けることができる構造とする。
【解決手段】 延長パイプ30の一端のフランジ30aがアンテナ12の基端付近に設けられた取付フランジ14に取り付けられ、他端側が、該取付フランジ14から、アンテナ12の周囲を包囲すると共にアンテナ12を超えて液面20aの方へ延びており、アンテナ12の外壁と延長パイプ30の内壁との間に径方向の空間32が存在し、取付フランジ14と延長パイプ30の一端30aとの間には、アンテナ12と空間32とが結合することによって発生する残響反射を放射させるための誘電体で充填された隙間34が設けられる。
(もっと読む)
ローカル測位用の改良レーダシステム
本発明の測位システムは、1又は複数の能動ランドマーク及びデバイスを備える。デバイスは、偏波を有する電磁パルスを送信し、或る期間にわたってリターン信号を受信する。デバイスは、偏波を有するリターン信号を優先的に受信することができる。リターン信号は、少なくとも1つの能動ランドマークからの少なくとも1つのリターン被変調パルスを含む。デバイスは、リターン信号からリターン被変調パルスを分離して、デバイスから能動ランドマークまでの距離を求めるように、リターン信号を処理する。デバイスは、オプションとして、リターン信号を受信している間、特定の方向に移動し、リターン信号のリターン被変調パルス部分におけるドップラーシフトを検出し、特定の方向と、デバイスと能動ランドマークとの間の直線との間の角度を求める。 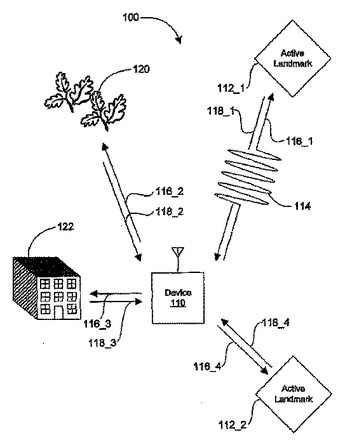 (もっと読む)
(もっと読む)
情報処理装置、情報処理方法、反射体、および通信システム
【課題】従来の情報処理装置においては、精度良く所定の位置に存在するRFIDタグに選択的な処理を実行させることができないという課題があった。
【解決手段】RFIDタグ1から送信される1つのフレームからなる信号である反射信号を、受信アンテナ4を介して受信する受信処理部6と、受信処理部6において受信した反射信号から、RFIDタグ1の位置に関する情報である位置情報を取得する位置測定部208と、位置測定部208が取得した位置情報に基づいて、RFIDタグ1が、所定の位置に存在するか否かを判定し判定結果を取得する位置判定部210と、判定結果に基づいて所定の処理を行なう処理部212とを具備する。
(もっと読む)
車両の物標検出装置及び物標検出方法
【課題】ノイズの誤検出等が少なく検出の信頼性が高い実用的な構成で、レーダ探査によって歩行者等の低反射物体を確実に検出して追跡し続け得るようにする。
【解決手段】車両1に搭載したレーダ2により自車前方を探査し、物標検出の設定された閾値以上の反射強度の物体を捕捉対象物標として検出し捕捉し、捕捉対象物標が歩行者等の反射強度の低い低反射物体のときに、閾値変更手段によって前記閾値を引き下げ、低反射物体を見失わないようにする。
(もっと読む)
現場で目標物を検出するための方法及び装置
現場内で目標物を検出する方法が記載され、1つまたは複数のデータセットを採取するステップを含み、各データセットが、複数の正規化されたデータ要素を含み、それぞれの正規化データ要素は、現場の同じ部分に関する基準反射に正規化される現場の部分からの反射に対応する。本方法は、次に、前記1つまたは複数のデータセットそれぞれの正規化データ要素の少なくとも1つを閾値化すること16を含む。閾値化ステップ16は、各正規化データ要素を、少なくとも第1の閾値および第2の閾値に比較することを含み、第1の閾値は第2の閾値より大きい。1つまたは複数の確認走査18を閾値ステップと組み合わせて使用することも記載される。空港滑走路等の表面での異物残骸(FOD)を検出する方法を使用するレーダシステムも記載される。 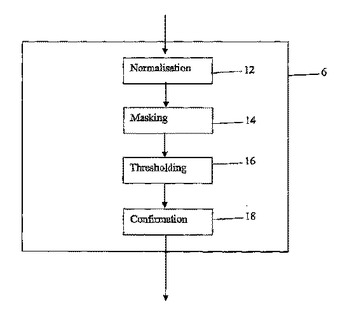 (もっと読む)
(もっと読む)
レーダ信号処理装置
【課題】物標からの反射波の距離減衰などに応じて相関行列を適切に推定することの出来るレーダ信号処理装置の提供
【解決手段】物標からの反射波を受信信号S2として受信して、所定の観測信号S3をそれぞれ出力する複数の観測手段OB、各観測信号から、受信アンテナからの距離r1,…,rnに対応した距離成分XRp(r1),…,XRp(rN)を抽出する距離成分抽出手段DS、抽出された各距離成分を集め、それら各距離成分に対応した相関行列推定値Rxxqを、指数平滑型相関行列推定法を用いて各距離成分に対応した忘却係数αをパラメータとする形でそれぞれ演算推定する相関行列推定手段RM、推定された相関行列推定値に基づいて物標の有無又は運動状態を推定する手段OM及び、受信アンテナ5からの距離に対応した忘却係数をそれぞれ演算決定し、相関行列推定手段に、各距離成分に対応した忘却係数として出力する忘却係数決定手段FFを有して構成される。
(もっと読む)
1,941 - 1,960 / 2,290
[ Back to top ]