
Fターム[5J070AC02]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 距離 (2,439)
Fターム[5J070AC02]の下位に属するFターム
Fターム[5J070AC02]に分類される特許
2,141 - 2,160 / 2,290
パルスレーダー装置
【課題】本願発明は、受信パルス波のリークのみならず、パルスレーダー装置内で発生する送信パルスのリークの影響を低減して、リークによる誤検出を防止し、至近距離にある対象物までの距離も精度よく検出することのできるパルスレーダー装置を提供することを目的とする。
【解決手段】上記目的を達成するために、本願発明にかかるパルスレーダー装置は、送信アンテナが出力する送信パルス波やパルス発生回路が出力する送信パルスが受信アンテナや受信回路にリークしている期間は、受信パルスを検出しないように復調回路の出力を遮断する。
(もっと読む)
FM−CWレーダ装置

【課題】 隣接して複数の目標物がある場合、それぞれの目標物からの受信信号がお互い干渉して目標検出のための閾値が上がり、目標物を検出できなくなるおそれがあった。
【解決手段】 目標検出のための閾値は、目標がない状況で受信したビート信号のノイズ成分の平均値や、送受信機と地面の角度や、送受信機の利得や送受信機の温度や、降雨状態をパラメータにして決定し、目標物の振幅値で閾値が左右されないようにすることで、目標物の不検出を抑えた。
(もっと読む)
車両用始動支援システム
前方を走行する車両(36)を位置測定するための長距離位置測定システム(10)と、始動プロセスを起動および制御するための始動制御器(24、26)と、を備える車両用始動支援システムにおいて、長距離位置測定システムが自己の車両(34)のすぐ前方の対象(46)を位置測定するための短距離位置測定システム(12)と組合されており、近距離位置測定システム(12)の信号に応じて始動プロセスを阻止するように決定装置(22)が形成されている。 (もっと読む)
位置検出システム、発信装置、サーバならびに同システムにおける無線信号の衝突回避方法
【課題】 無線信号の衝突を回避しつつタグの消費電力を軽減する。
【解決手段】 第1の無線信号を受信後、第2の無線信号を送信するまでに、タグ(TG)固有の待機時間を入れ、送信時間をシフトすることにより、あるいは、タグが第1の無線信号の電界強度を測定し、電界強度が小さいときに待機時間を短く設定し、その情報を含めてサーバへ第2の無線信号を送信することにより、サーバ(SV)は、タグから受信した第2の無線信号が示す符号から待機時間を算出する。また、第1の無線信号に信号を入れ、タグがその情報を読みルールに従い第2の無線信号を送信するか否かを決定することで衝突回避してもよい。
(もっと読む)
無線タグ検出システム
【課題】 送信電波の相互干渉を好適に防止しつつ所定の領域内における無線タグを好適に検出する無線タグ検出システムを提供する。
【解決手段】 複数の据置式無線タグ通信装置12と携帯式無線タグ通信装置14とが互いに異なるタイミングで送信信号を送信するように制御する送信制御部146を含むことから、時分割で前記送信信号を送信することで、前記複数の据置式無線タグ通信装置12から送信される送信電波と携帯式無線タグ通信装置14から送信される送信電波との干渉が好適に防止される。すなわち、送信電波の相互干渉を好適に防止しつつ所定の領域内における無線タグ16を好適に検出する無線タグ検出システム10を提供することができる。
(もっと読む)
点滅灯内において一体にまとめられた、光学的な、側方の周辺センサーを有する自動車
【課題】 本発明は、車両の側方の周辺内における対象物を検出するための、少なくとも1つのセンサーを有する自動車であって、その際、
このセンサーが、電磁的な放射線を発信するための少なくとも1つの発信部、並びに、対象物に反射された電磁的な放射線を受信するための1つの受信部を有している様式の上記自動車に関する。
【解決手段】 本発明により、発信部15および受信部20は、側方点滅灯10内において設けられており、この側方点滅灯が、自動車の側壁に装着されており、その際、この発信部15および受信部20が、この側方点滅灯10のカバー50によって覆われている。 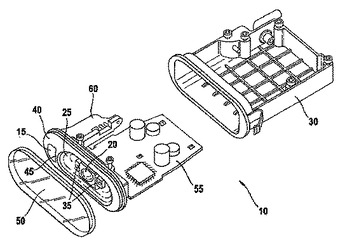 (もっと読む)
(もっと読む)
レーダ装置
【課題】同一ビーム内に複数目標が存在する状況において、角度検出誤差を少なくかつ効率的に目標方向の角度を得る。
【解決手段】目標13からの反射信号はアレーアンテナ14を介し受信部15で受信され、FFT16−1〜16−nで周波数解析される。そして、目標信号は、マルチビーム検出手段18および高分解能処理器19に供給される。マルチビーム検出手段18で形成されたビームにおけるピークをピーク検出手段20が検出し、その信号を高分解能処理器19に供給する。高分解能処理器19は、ピークの周辺について、高分解能処理を行うので、計算量を少なくして、高分解能処理を行うことができる。
(もっと読む)
差し迫った衝突を認識する方法および装置
前方に位置する対象との将来的な期間内の差し迫った衝突を認識するために、電磁放射を送信および受信する方法および装置であって、送信される放射がFMCW変調され、かつ周波数ランプのランプ勾配が送信周波数および将来的な期間に従って定められ、負の受信周波数が検出された場合に将来的な期間内の差し迫った衝突が認識される。 (もっと読む)
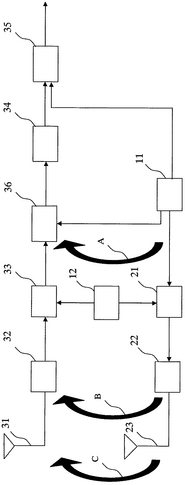
レーダ装置
【課題】 近距離領域から長距離領域までに存在する物体を精度よく検知可能なパルスレーダ装置を提供すること。
【解決手段】 パルスレーダ装置1において、近距離モードの間、発振器12は、一定の周波数を有する搬送波を生成し、パルス生成部13は、相対的にパルス幅の短い第1のパルスを繰り返し生成し、変調部14は、第1のパルスで搬送波を変調して第1の高周波パルスを生成する。また、長距離モードの間、発振器12は、低周波数及び高周波数の間で掃引されたチャープ信号を生成し、パルス生成部13は、相対的にパルス幅の長い第2のパルスを生成し、さらに、変調部14は、第2のパルスでチャープ信号を変調して第2の高周波パルスを生成する。送信用アンテナは、以上のような第1の高周波パルス及び第2の高周波パルスを空間に送出する。
(もっと読む)
車両用のレーダーセンサ
周波数変調されたレーダー信号を送受信する少なくとも1つの送受信器(14、16)と、位置測定された対象物との間隔(di)および相対速度(vi)を計算する評価器(24、48)とを備える、車両用のレーダーセンサにおいて、相対速度(vi’)を独立して測定する統合されたドップラーレーダーシステム(26、42、44)を特徴とする。 (もっと読む)
車載用信号処理装置及び車載用レーダ装置
【課題】外筐体に設けられる外部接続コネクタと内部回路とを接続する伝送線を磁気シールドしつつ、外部接続コネクタを内部回路の位置に規制されることなく、自由に設置できるようにする。
【解決手段】外筐体60は、外筐体本体61と、その内周面に施されているシールド層62とを有して構成されている。内部回路からの伝送線73は、外筐体60のシールド層62の外周側を、このシールド層62に沿って所望の位置迄伸び、そこに外部接続コネクタ70が設けられている。
(もっと読む)
周波数掃引の直線性が改善された周波数変調持続波(FMCW)レーダ
周波数掃引信号を生成するための周波数掃引発生器42を備えた周波数変調持続波(FMCW)レーダが記述されている。弁別器52は、周波数掃引信号の一部を受け取り、基準差周波数信号を生成している。弁別器52は、レーザダイオード72を備えることができる光遅延手段と、光ファイバ74と、差周波数信号が得られる時間変位周波数掃引信号を生成するための検出器76とを備えている。また、レーダによって送信される信号を周波数掃引信号から生成し、かつ、ターゲット差周波数信号を生成するトランシーバ50が記述されている。アナログ−ディジタル変換器80は、基準差周波数信号の周波数から得られるレートでターゲット差周波数信号をサンプリングしている。また、空港の滑走路上の異物デブリスの検出および周辺警戒などの様々なアプリケーションにおけるレーダの使用が記述されている。  (もっと読む)
(もっと読む)
高周波送受信器およびそれを具備するレーダ装置ならびにそれを搭載したレーダ装置搭載車両およびレーダ装置搭載小型船舶
【課題】 中間周波信号を遮断するスイッチを備えたパルス変調方式の高周波送受信器において、スイッチの出力の直流レベルを安定にすること。
【解決手段】 パルス変調方式の高周波送受信器において、ミキサー6の出力端6aに接続された、中間周波信号を後段に出力する第1の系統S1および中間周波信号を終端する終端回路としての抵抗11が接続された第2の系統S2に交互に切り替えるスイッチ7と、ミキサー6の出力端6aとスイッチ7の入力端7aとの間に直列に接続された交流結合コンデンサ12とを備えている高周波送受信器である。交流結合コンデンサ12が、ミキサー6の出力の直流成分を遮断し、スイッチ7の入力端7aの直流レベルを安定にするため、スイッチ7の第1の系統S1への出力の直流レベルを安定にすることができる。
(もっと読む)
レーダ装置における温度補償改善
レーダ・ベースの距離測定装置は、マイクロ波周波数信号を生成する周波数発生器を備え、マイクロ波周波数信号の周波数が周波数発生器に供給された変調信号により決定される量だけ変調されるマイクロ波回路と、マイクロ波回路の少なくとも一部の温度を測定する温度センサと、駆動信号とマイクロ波検出器により検出されたエコー信号とから導出された情報を用いて温度センサの出力を処理して、補償された温度信号を生成する補償手段と、補償された温度信号を受け取り且つ周波数発生器により発生された信号の周波数を調整することにより周波数発生器の温度変化の効果を少なくとも部分的に補正するよう適合された周波数調整手段とを備える。補償手段がエコー信号から導出された情報を用いて閉ループにおける温度センサの出力を変更するので、周波数調整手段が、周波数発生器により出力される周波数を調整して、それを、その温度変化にも拘わらず出来るだけ理想の一定値近くに保つことができる。  (もっと読む)
(もっと読む)
レーダ装置
【課題】 位相モノパルス方式のレーダの高周波部品の数を削減するとともに測定精度を向上する。
【解決手段】 三角波の第1周期においては、スイッチ22で受信アンテナとしてアンテナAT0とAT1を交互に選択してスイッチ30でAT0からの信号を第1の処理系へ、AT1からの信号を第2の処理系へ振り分ける。三角波の第2周期においては、AT1とAT2を交互に選択してAT1からの信号を第1の処理系へ、AT2からの信号を第2の処理系へ振り分ける。三角波の第3周期においては、AT2とAT0を交互に選択してAT2からの信号を第1の処理系へ、AT0からの信号を第2の処理系へ振り分ける。
(もっと読む)
ベースステーションと可動対象物との間の距離を決定するための方法及びその方法のためのベースステーション及び確認システム
【解決手段】本発明は、ベースステーション(SLG)と可動対象物(DT1〜DT3)との間の距離を決定するための方法、特に例えば発送システム、輸送システム又は製造システムにおける物体に関連する状態データ及びプロセスデータ又はそのいずれか一方を検出するため物体に取付けられた可動対象物としての少なくとも1つの可動データメモリを有する確認システムにおける距離決定方法に関する。本発明方法においては、高周波搬送周波数(fo)とオフセット周波数(df)とがIQ変調のために設定される。高周波搬送周波数は時間的に順次オフセット周波数だけ高められ、また低められることにより、変調された高周波搬送信号(TS)に生じる高周波搬送ベース周波数(fo+df、fo−df)が周波数変化の際同位相を有する。高周波搬送信号(TS)は引き続いて送出され、同時に、移動対象物により後方散乱された高周波搬送信号(RS)は搬送波位相信号(PS)と混合される。両高周波搬送ベース周波数(fo+df、fo−df)に対し、所属の搬送波位相(PH1、PH2)が時間的に順次求められ、次いでその差(dPH)からベースステーションと各移動対象物との間の距離が決定される。  (もっと読む)
(もっと読む)
レーダ受信機およびレーダ装置
【課題】検波信号に含まれる白色雑音を低減し、さらに検波信号の歪みを低減したレーダ受信機、および測距感度が良好であり、かつ正確な測距を行うことが可能なレーダ装置を提供する。
【解決手段】アンテナ54で受信されたパルス変調波は、受信パルス変調信号として高周波受信器12に入力される。高周波受信器12は受信パルス変調信号に対して、増幅、周波数変換などを行う。高周波受信器12が出力する信号は、検波前置帯域制限フィルタ14によって白色雑音が低減された上で多段型検波増幅器20に入力される。多段型検波増幅器20は複数の単位検波増幅器26を備え、各単位検波増幅器26の検波出力信号を加算合計して出力する。複数の単位検波増幅器26の段間には、段間帯域制限フィルタ30が設けられており、多段型検波増幅器20から出力される白色雑音を低減する。
(もっと読む)
生物の身体または身体内の位置および/または運動を、レーザ支援してセンシングする方法
本発明は、生物の身体または身体内部の身体部分の位置および/または運動に関する情報をセンシングするためのシステムに関するものであり、とりわけ自動車で使用される。この方法は、本発明によりレーダ領域の周波数を有する電磁信号(15)を生物の所定の身体領域に送信(18)するステップ、
身体領域から反射された電磁信号(22)を受信(20)するステップ、
受信した受信信号(22)を、送信信号(15)に対する伝搬時間差および/または周波数差に関して評価(30)するステップを有する。
本発明の方法により、呼吸および心拍、並びに自動車の運転者の身体の位置が走行中に監視される。 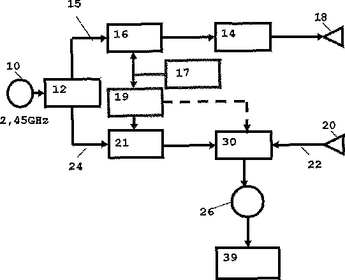 (もっと読む)
(もっと読む)
電磁波を用いた生物体に関する情報の推定方法および装置
【課題】人物等の位置、3次元姿勢、行動などの情報を推定する際に、「照明」、「気温」、「人物の着用する衣服や靴」などの影響を受けることなく、比較的精度高く推定すること。
【解決手段】生物体1に関する情報の推定において、生物体1のいる空間にミリ波からテラヘルツ領域の周波数を含む電磁波8を照射して、生物体1により反射される反射電磁波9を検出することによって生物体1の少なくとも一部位の方向と距離を含むデータを得、生物体1の少なくとも一部位の空間位置を求める。ミリ波からテラヘルツ領域の周波数を含む電磁波は、物体は透過するが生物体ではその水分等のために透過せずに一部は反射される特性を持つ。
(もっと読む)
信号の遅延敏感測定のための方法及び装置
【課題】測定時間を短縮できる方法と装置を提供する。
【解決手段】i)少なくとも部分的に強度変調された信号PE(t)の瞬間値を検出し、ii)強度変調の周波数ω1とは異なる周波数ω2を有する、第1の基準信号Um(t)の瞬間値を検出し、iii)混合信号値UΔを得るために、PE(t)の検出された瞬間値を、Um(t)の検出された瞬間値と混合し、iv)ω2及びω1の双方と異なる周波数Δωを有する、第2の基準信号UI(t)の瞬間値を検出し、v)同じ周波数Δωを有するが、UI(t)に対して位相シフトされている、第3の基準信号UQ(t)の瞬間値を検出し、vi)第1の測定信号値を得るために、UΔをUI(t)の検出された瞬間値と混合し、vii)第2の測定信号値を得るために、UΔをUQ(t)の検出された瞬間値と混合し、及びviii)該二つの測定信号値からPE(t)の振幅及び/又は位相位置を計算する。
(もっと読む)
2,141 - 2,160 / 2,290
[ Back to top ]