
Fターム[5J070AC02]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 距離 (2,439)
Fターム[5J070AC02]の下位に属するFターム
Fターム[5J070AC02]に分類される特許
2,161 - 2,180 / 2,290
信号の遅延敏感測定のための方法及び装置

【課題】測定時間を短縮できる方法と装置を提供する。
【解決手段】i)少なくとも部分的に強度変調された信号PE(t)の瞬間値を検出し、ii)強度変調の周波数ω1とは異なる周波数ω2を有する、第1の基準信号Um(t)の瞬間値を検出し、iii)混合信号値UΔを得るために、PE(t)の検出された瞬間値を、Um(t)の検出された瞬間値と混合し、iv)ω2及びω1の双方と異なる周波数Δωを有する、第2の基準信号UI(t)の瞬間値を検出し、v)同じ周波数Δωを有するが、UI(t)に対して位相シフトされている、第3の基準信号UQ(t)の瞬間値を検出し、vi)第1の測定信号値を得るために、UΔをUI(t)の検出された瞬間値と混合し、vii)第2の測定信号値を得るために、UΔをUQ(t)の検出された瞬間値と混合し、及びviii)該二つの測定信号値からPE(t)の振幅及び/又は位相位置を計算する。
(もっと読む)
測距センサ及びその設定方法

【課題】適切な閾値を自動で決定することのできる測距センサを提供する。
【解決手段】測距センサの設定方法は、センサヘッド部の測距媒体照射位置に対象物を配置した状態で、測距媒体を照射してセンサヘッド部の照射面から対象物までの距離を演算し、演算された距離に基づいて、対象物の配置位置とセンサヘッド部との間に閾値を自動的に設定する。これにより、ユーザは手動で閾値を演算して設定することなく、実際に対象物をセットして測距媒体を照射することにより最適な閾値を自動的に演算して設定でき、かつ設定された閾値によって対象物が無い場合は測定距離が閾値を上回って出力OFFとなり、対象物が検出された場合は測定距離が閾値を下回って出力OFFとなる、センサの一般的な出力パターンと一致させることができ、極めて使い勝手の良い測距センサが実現される。
(もっと読む)
ディジタル濾波方法
非線形フィルタによりK個の入力値をディジタル濾波する方法が紹介され、フィルタが、K個の入力値からR最大値を発生する(K≧R≧1)。特にこの方法は。奇数K個の入力値から、出力値として中央値を発生するために使用することができ、従ってR=(K+1)/2である。基本思想は、一方では固定小数点形式で入力値の2進表示の使用であり、他方ではビットで逐次の処理であり、すべての普通の2進数表示が固定小数点形式で使用され、使用すべき数表示のそれぞれの性質を考慮して僅かな整合しか必要とされない。
この方法は、ディジタルフィルタの実現のため、特に物体識別システムにおける信号処理のために使用することができる。 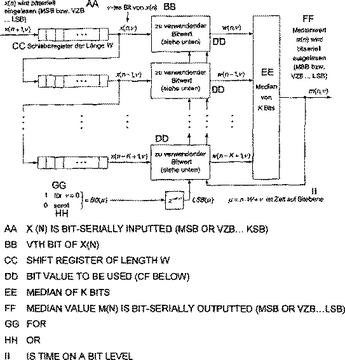 (もっと読む)
(もっと読む)
無線端末装置、コードレス電話装置セット、通信制御プログラム、及びコンピュータ読み取り可能な記録媒体
【課題】中継装置の通信可能エリアに束縛されることなく、行方不明の無線端末装置を捜索し、その手がかりを得ることができる無線端末装置を実現する。
【解決手段】 本発明に係る無線端末装置は、通信相手の無線端末装置の識別情報を記憶する記憶部17と、信号を送受信する通信部12と、上記識別情報を含む送信用信号を作成し、当該送信用信号を通信部12を介して発信する通信制御部14と、通信制御部14を介して受信した受信信号に上記識別情報が含まれているか否かを、上記記憶部17に記憶された識別情報との比較によって検出する検出部16と、を備えている。それゆえ、送信用信号による発呼に対し、通信相手の無線端末装置が応答するか否か、すなわち、通信相手の無線端末装置が、捜索側の無線端末装置の通信可能範囲内に存在しているか否かの手がかりをつかむことができる。
(もっと読む)
近距離目標物体の距離及び角度特定用の多目標対応型方法及び多目標対応型センサー機器
本発明は、近距離目標物体の距離及び角度特定用の多目標対応型方法に関し、本方法は以下のステップを含む。すなわち、a)第一のセンサー要素(10)の送信アンテナ(11)により特性信号が送信され、b)反射された特性信号が第一のセンサー要素(10)の少なくとも2個の隣接する受信アンテナ(1、2)において受信され、c)目標物体と第一のセンサー要素(10)の間の距離を特定するため、第一のセンサー要素(10)の2個の隣接する受信アンテナ(1、2)への反射された特性信号の伝播時間の差が測定され、d)目標物体と第一のセンサー要素(10)との角度を特定するため、第一のセンサー要素(10)の2個の隣接する受信アンテナ(1、2)の間での特性信号の位相差が測定される。本発明は、上述の方法を実施する機器にも関する。  (もっと読む)
(もっと読む)
レーダ装置
【課題】 位相モノパルス方式のレーダの高周波部品の数を削減する。
【解決手段】 スイッチ22により2つの受信アンテナを交互に選択して選択された受信信号を受信増幅器26で増幅してミキサ28で送信信号の一部と混合する。ミキサ28から出力されるビート信号はスイッチ30により2つの処理系へ振り分けられる。
(もっと読む)
レーダ装置
【課題】 強度の強いメインローブクラッタや妨害環境下でも、クラッタ及び妨害の両者を十分抑圧する。
【解決手段】 主アンテナ11及び補助アンテナ21それぞれの受信信号に対して、MTI12,22でクラッタを抑圧し、さらにDFT回路13,23でDFTを実施してクラッタを十分抑圧した後、SLC回路30〜3M−1にて、主CHと補助CHに対する同一のフィルタバンク信号を用いて、SLC動作を実施する。したがって、主CH及び補助CHの入力信号のクラッタ成分を、MTI及びDFTにより周波数軸上で十分に抑圧し、妨害信号成分を支配的にした上でSLC動作するため、妨害成分も確実に抑圧することができる。
(もっと読む)
測高レーダ装置とその測角処理方法
【課題】 簡易な構成で、マルチパスによる測高精度の劣化を低減する。
【解決手段】 目標検出回路13で複数の受信ビームのいずれかから目標が検出されたとき、目標検出ビームの受信信号から検出目標の距離情報及び粗測角値を求める。測角用ビーム形成回路16は、粗測角値に対して所定仰角だけずらして指向方向を決定し、予め記憶した素子信号メモリ15から目標距離に応じて記憶した素子信号を読み出し、測角用ビームを形成する。目標検出位置と検出ビームによる概略測角結果を基に、再度指向仰角の異なる複数の受信ビームを形成して測角処理を行い、各ビームで測角した結果を平均化してマルチパスの影響による測高精度のばらつきを低減する。この際、このとき、素子信号をいったんメモリして必要なビームを再形成するので、再度複数ビームを形成するために新たな送受信を要しない。
(もっと読む)
アンビギティー検知式周波数偏位変調
距離範囲検知装置は、マイクロ波信号を送信するようになされた送信機(4)、及び目標から反射した、送信信号の一部に対応するエコー信号を受信する受信機(4)と、前記送信信号を発生するために前記送信機(4)に供給される駆動信号を発生する信号発生手段(2)であって、信号発生手段の発生する駆動信号には、少なくとも2つの周波数を含む第1の信号フレーム(300a)と少なくとも2つの周波数を含む第2の信号フレーム(301a)が含まれており、前記第2の信号フレーム(301a)は前記第1の信号フレーム(300a)と異なる信号発生手段(2)と、前記送信信号と共に前記エコー信号を処理して前記エコー信号を発生した目標までの距離を決定するプロセッサ(11)を備える。本装置は、自動車の、代表的には車間距離制御(ACC)機能における周波数偏位変調(FSK)レーダーに特に適している。本装置は距離測定のアンビギティーを低減可能である。アンビギティーを低減する対応方法も開示される。 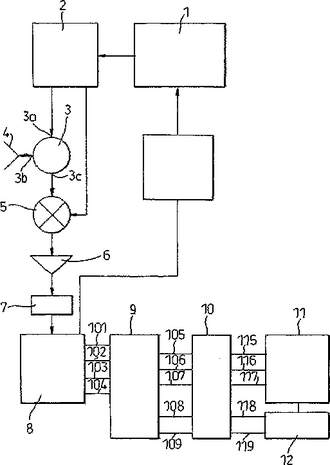 (もっと読む)
(もっと読む)
自動駐車システム
【課題】 自動駐車のための設定を駐車場以外の場所で、駐車場の環境に依存せずに設定可能であり、かつ、車両が駐車場に近付いた時点で自動駐車モードに入れる利便性の高い自動誘導システムを提供すること。
【解決手段】 電波マーカ2は、駐車スペースおよびその周辺に複数設置され、それぞれ位置情報を有する。検出器1は電波マーカ2と無線通信が可能であり、現在位置を取得する現在位置取得部17と、駐車スペースの寸法や複数の電波マーカ2の配置位置を示す配置情報を記憶する設定記憶部16と、受信アンテナ13a、13b、13cで受信した信号の信号レベルに基づいて電波マーカまでの距離を検出して電波マーカの位置を取得し、複数の電波マーカ2の位置を取得することにより配置情報を参照して現在位置と複数の電波マーカ2の配置との位置関係を特定する位置検出部18とを備える。自動運転制御装置3は特定された位置関係に基づいて車両の自動駐車を行う。
(もっと読む)
空気バネにおける高精度レベル測定のためのマイクロ波センサ
【課題】測距装置及び適切な方法及び後者の用途を提供する。
【解決手段】空気バネにおける高精度レベル測定のための装置及び方法。レベルは、マイクロ波空洞共振器の共振周波数を判断することによって測定される。バネ効果はないがマイクロ波センサに対する空洞共振器として作用する導電渦巻バネ(2)が、空気バネに挿入される。共振点が検出器ダイオードによって判断される最高品質モード(H011モード)が、適切な注入(1)を用いて励起され、一方で共振モードを励起するマイクロ波送信器の周波数が測定され、渦巻バネ及び従って同じく空気バネの延長のレベルは、利用される渦巻バネに関して特徴的な予め記録された特性曲線を通して判断される。
(もっと読む)
UWBレーダに搭載されるインパルス信号発生回路
【課題】リンギングの発生を抑えたインパルス信号を出力するUWBレーダに搭載されるインパルス信号発生回路を実現する。
【解決手段】パルス信号発生回路1と、パルス信号発生回路から伝送されるパルス信号を高周波伝送路51に分岐し、高周波伝送路51により振幅が反転され時間が遅延されたパルス信号を、パルス信号発生回路1から伝送されるパルス信号と再結合してインパルス信号を生成する生成回路5と、インパルス信号発生回路1の全体のインピーダンスに占める寄生成分の割合を相対的に減らすことにより、インパルス信号のリンギングを抑圧する抵抗7と、を備える。
(もっと読む)
振幅変調器、切替えスイッチ、それを具備する高周波送受信器およびレーダ装置ならびにレーダ装置搭載車両およびレーダ装置搭載小型船舶
【課題】 変調器特性をチューニングすることができる振幅変調器を提供すること。
【解決手段】 高周波信号を伝送する2つの高周波用伝送線路1,2の間に一方の高周波用伝送線路1から入力された高周波信号を変調して他方の高周波用伝送線路2の出力端2a側に出力する高周波変調用素子としてのPINダイオード3が設けられており、このPINダイオード3に接続されたバイアス供給回路Cが、PINダイオード3に流れるバイアス電流を調節する可変抵抗器であるトリマブルチップ抵抗4を備えている振幅変調器である。トリマブルチップ抵抗4の抵抗値を調整することにより、PINダイオード3に流れるバイアス電流を制御して変調器特性をチューニングすることができる。
(もっと読む)
パルス波レーダー装置
【課題】車載用等のパルス波レーダー装置は、数十cmから数十mまでの広い範囲で対象物を検知する必要があることから、受信回路は大きな信号の受信パルス波から小さな信号の受信パルス波までダイナミックレンジの広い増幅回路が要求される。
【解決手段】本発明に係るパルス波レーダー装置は、近距離にある対象物を測定するとき、即ち、送信パルス波を送出直後は受信回路の増幅度が小さくなるように制御し、遠距離にある対象物を測定するとき、即ち、送信パルス波を送出して時間経過と共に受信回路の増幅度が大きくなるように制御する。
(もっと読む)
オブジェクトの間隔及び速度測定のための装置
本発明はレーダパルスによるオブジェクトの間隔及び速度を測定するための装置に関し、これにより送信及び受信されるレーダパルスは互いに受信側のミキサ(8)において相関される。レンジゲートを設定するための制御装置(7)において、ミキサ(8)に供給される送信側のレーダパルスはそのパルス遅延に関して連続的に上昇及び/又は下降して変化可能である。切り換え装置はドップラー周波数測定モードに切り換えられるか又は距離測定モードにリセットされる。 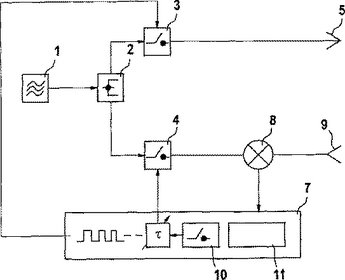 (もっと読む)
(もっと読む)
方向性結合器型分岐器、それを具備する高周波送受信器およびレーダ装置ならびにレーダ装置搭載車両およびレーダ装置搭載小型船舶
【課題】 分岐する2つの高周波信号の間の位相差を可変制御することができる方向性結合器型分岐器を提供すること。
【解決手段】 中途を電磁結合するように近接もしくは接合させた、高周波信号を伝送する第1および第2の高周波用伝送線路としてのマイクロストリップ線路1,2と、第2の高周波用伝送線路としてのマイクロストリップ線路2の中途から見て第1の高周波用伝送線路としてのマイクロストリップ線路1の出力端1bと同じ側の一端2aに設けた、入射する高周波信号の位相を変化させて反射する可変位相反射器としての可変インピーダンス素子であるチューナブルコンデンサ3とを備えている方向性結合器型分岐器である。一端2aに設けたチューナブルコンデンサ3の容量を調整することにより、チューナブルコンデンサ3が反射する高周波信号の位相を変化させて、分岐する2つの高周波信号の間の位相差を可変制御することができる。
(もっと読む)
変調器、それを用いた高周波送受信器およびレーダ装置ならびにレーダ装置搭載車両およびレーダ装置搭載小型船舶
【課題】 オン/オフ比特性を改善することができる反射型の変調器を提供すること。
【解決手段】 第1〜第3の誘電体線路1〜3が磁性体4にそれぞれ第1〜第3の接続部4a〜4cで接続されたサーキュレータに、第2の接続部4bに一端が接続された第2の誘電体線路2の他端にPINダイオード5が接続されてなる変調器において、第2の誘電体線路2に沿った、第2の接続部4bからPINダイオード5までの距離を、第2の誘電体線路2を通ってPINダイオード5で反射して第3の誘電体線路3に漏洩した高周波信号をWaとし、第1の誘電体線路1からサーキュレータを介して第3の誘電体線路3に漏洩した高周波信号をWbとし、それらの中心周波数における位相差をδとしたときに、δ=(2N+1)・πとなるように設定した変調器である。WaとWbとが丁度逆位相で合波されて効果的に打ち消し合うのでオン/オフ比特性が良好となる。
(もっと読む)
対象物検出システムの信号またはデータを評価する方法および装置
殊に自動車用の対象物検出システムを提案する。ここではレーダセンサによって、対象物から反射されたレーダ信号が、対象物の距離(d)および/または相対速度または接近速度(Cv)を求めるために処理される。最初の評価機会が距離信号(d)または接近速度信号(Cv)として生じるまでレーダセンサの少なくとも1つのチャネル(I,Q)のデジタル信号を処理し、距離信号(d)または接近速度信号(Cv)としての評価に対するモード切り換え(4)を行い、当該切り換えによって、どのデータが求められるのかが定められ、レーダセンサと後続接続された制御装置(7)との間のインターフェース(6)に供給される。  (もっと読む)
(もっと読む)
レーダ装置
【課題】要求覆域に対して各レーダで探知すべき覆域を最適化し、短いデータ更新間隔で要求覆域を探知できるレーダ装置を得る。
【解決手段】要求覆域を保持する要求覆域保持手段7と、レーダ情報を保持するレーダ情報保持手段8と、覆域境界の組を保持する覆域境界保持手段10と、前記要求覆域、レーダ情報、覆域境界の組に基きデータ更新間隔を評価するデータ更新間隔評価手段11と、隣接するレーダのデータ更新間隔を比較し大きい方を出力する隣接レーダデータ更新間隔比較手段13と、隣接する一方のレーダのデータ更新間隔が減少し、隣接する他方のレーダのデータ更新間隔が増加するように、両者の間の覆域境界を修正する覆域境界修正手段14と、前記要求覆域、レーダ情報、修正後の覆域境界の組に基き各レーダのレーダ諸元を算出するレーダ諸元算出手段16と、前記レーダ諸元に基き、各レーダを制御するレーダ制御手段17とを設けた。
(もっと読む)
タイミング情報の取得およびレンジングを行うための装置、システムおよび方法
システムは、第1装置(1)と、1つまたは複数の第2装置(2)とを含む。第1信号(61)および第2信号(62)が、第1装置(1)から第2装置(2)へと送信され、第3信号(63)が、第2装置から第1装置へと送信される。これらの信号(61,62,64)が送信され受信される時刻が、測定され、第1および第2装置の第1および第2ローカルクロックにおける異なるクロック速度の修正を含むタイミング情報の計算に用いられる。 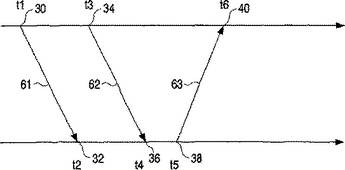 (もっと読む)
(もっと読む)
2,161 - 2,180 / 2,290
[ Back to top ]