
レーダ装置

【課題】周波数変調された電磁波を送受信し、その送受信信号に基づいて生成したビート信号を周波数解析することで各種情報を生成するレーダ装置において、ビート信号を生成する機器の有効動作範囲外で発生するノイズの有無を判定できるようにする。
【解決手段】所定の変化率で周波数が変化するレーダ波を送受信する遠距離測定モードでの測定結果からピーク信号成分(遠距離ピーク)を抽出すると共に、遠距離測定モードの場合より大きい変化率で周波数が変化するレーダ波を送受信する近距離測定モードでの測定結果からピーク信号成分(近距離ピーク)を抽出し(S110〜S140)、遠距離ピーク及び近距離ピークの双方に、周波数,信号強度,方位のいずれもが一致するピーク信号成分が存在する場合に、ピーク信号成分の中に妨害波由来ピークが混入しているものと判断する(S150〜S160)。
【解決手段】所定の変化率で周波数が変化するレーダ波を送受信する遠距離測定モードでの測定結果からピーク信号成分(遠距離ピーク)を抽出すると共に、遠距離測定モードの場合より大きい変化率で周波数が変化するレーダ波を送受信する近距離測定モードでの測定結果からピーク信号成分(近距離ピーク)を抽出し(S110〜S140)、遠距離ピーク及び近距離ピークの双方に、周波数,信号強度,方位のいずれもが一致するピーク信号成分が存在する場合に、ピーク信号成分の中に妨害波由来ピークが混入しているものと判断する(S150〜S160)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、周波数変調された電磁波を送受信することにより、電磁波を反射した物標を検出するレーダ装置に関する。
【背景技術】
【0002】
車両に搭載され、衝突防止等の制御に用いられるレーダ装置として、周波数変調された電磁波(FMCW波)をレーダ波として用いるFMCWレーダ装置が知られている。
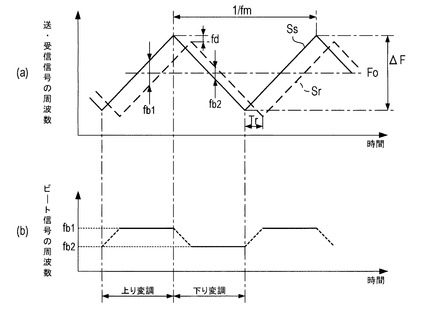
FMCWレーダ装置では、図6(a)に実線で示すように、三角波状の変調信号により周波数変調され周波数が時間に対して直線的に漸次増減する送信信号Ssをレーダ波として送信し、物標により反射されたレーダ波(以下では「反射波」ともいう)を受信する。この時、受信信号Srは、図6(a)に点線で示すように、レーダ波が物標との間を往復するのに要する時間、即ち物標までの距離に応じた時間Trだけ遅延し、物標との相対速度に応じた周波数fdだけドップラシフトする。
【0003】
このような受信信号Srと送信信号Ssとをミキサで混合することにより、図6(b)に示すように、両信号Sr,Ssの差の周波数成分であるビート信号Bを発生させる。なお、送信信号Ssの周波数が増加する時のビート信号Bの周波数(以下「上り変調時のビート周波数」という)fb1と、送信信号Ssの周波数が減少する時のビート信号Bの周波数(以下「下り変調時のビート周波数」という)fb2とから、遅延時間Trに基づく周波数frは(1)式、ドップラシフト周波数fdは(2)式にて表される。
【0004】
そして、これらの周波数fr,fdに基づいて、(3)(4)式から物標との距離R及び相対速度Vを求めるようにされている。
【0005】
【数1】

【0006】
但し、cは電波伝搬速度,fmは送信信号の変調周波数,ΔFは送信信号の周波数変動幅,Foは送信信号の中心周波数である。
また、ビート周波数fb1,fb2の特定には一般に信号処理が用いられている。具体的には、ビート信号Bをサンプリングし、変調種別(上り変調/下り変調)毎に高速フーリエ変換(距離FFTともいう)を行うことにより、変調種別毎にビート信号Bの周波数分布を求め、信号強度がピークとなる周波数をビート周波数fb1,fb2としている。
【0007】
なお、ビート信号Bのサンプリング周波数fsは、周知のように、ビート信号Bの上限周波数の2倍以上に設定する必要がある。つまり、予め設定された検知範囲内に存在する物標からの反射波に基づいて生成されるビート信号Bの周波数成分が、この上限周波数以下の信号帯域内に入るようにレーダ波の変調幅ΔFや変調周期1/fmなどが設定される。
【0008】
そして、ミキサによってビート周波数の検出対象範囲内の周波数に変換されるノイズ、即ち、レーダ波に近い周波数を有するノイズを除去する手法は各種提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特許第4356758号
【発明の概要】
【発明が解決しようとする課題】
【0010】
ところで、車載用のFMCWレーダ装置には、通常、ミリ波帯(ギガヘルツ帯)の信号が用いられているため、ミキサには、ミリ波帯域の周波数を有する入力信号に対して有効に機能するものが使用されている。従って、ミリ波帯域外のビート信号の周波数(有効動作範囲外の例えばメガヘルツオーダ以下)を有する入力信号(ノイズ)は、周波数変換されることなくミキサを通過し、そのままビート信号に重畳されてしまう。
【0011】
そして、ビート信号に重畳されたノイズは、距離FFTを実行した時に、サンプリング周波数fsの1/2の周波数(即ち、ナイキスト周波数)以下であれば、そのままの周波数で検出され、ナイキスト周波数より大きい周波数であればナイキスト周波数以下の周波数に折り返されて検出されることとなる。
【0012】
ところが、このような有効動作範囲外のノイズへの対策はなされていないという問題があった。
本発明は、上記問題点を解決するために、周波数変調された電磁波を送受信し、その送受信信号に基づいて生成したビート信号を周波数解析することで各種情報を生成するレーダ装置において、ビート信号を生成する機器の有効動作範囲外で発生するノイズの有無を判定できるようにし、更には、そのノイズの影響を除去することを目的とする。
【課題を解決するための手段】
【0013】
上記課題を解決するための発明である請求項1に記載のレーダ装置では、送受信手段にて送受信される電磁波の送信信号及び受信信号に基づいて、ビート信号生成手段がビート信号を生成し、ピーク抽出手段が、ビート信号生成手段が生成するビート信号の周波数解析を実行し、解析結果から信号強度がピークとなる信号成分であるピーク信号成分を抽出する。このピーク抽出手段にて抽出されたピーク信号成分に基づいて、物標情報生成手段が、電磁波を反射した物標に関する情報を求める。
【0014】
但し、送受信手段は、予め設定された第1の変化率で周波数が変化する電磁波を送受信する第1測定モード、及び前記第1の変化率とは異なる第2の変化率で周波数が変化する電磁波を送受信する第2測定モードで動作するように構成されている。そして、妨害波判定手段は、第1測定モードでの動作時にピーク抽出手段にて抽出されたピーク信号成分と、第2測定モードでの動作時にピーク抽出手段にて抽出されたピーク信号成分とで、少なくとも周波数が一致することを含む予め設定された一致条件が成立するものが存在する場合に、妨害波が混入しているものと判定する。
【0015】
つまり、検出対象となる妨害波は、ビート信号生成手段が有効に機能する有効動作範囲外の周波数を有する信号であり、このような妨害波は、ビート信号生成手段にて周波数変換されることなくビート信号に重畳される。このため、第1測定モード及び第2測定モードに拘わらず、周波数解析によって得られる周波数分布(スペクトル)上には、少なくとも同じ周波数を有し、周波数以外の特徴(信号強度、到来方向等)も類似したピーク信号成分として現れることになる。
【0016】
従って、これら周波数や周波数以外の特徴を一致条件として、両測定モードで測定結果から得られたピーク信号成分を比較し、一致条件が成立するピーク信号成分が存在するか否かによって、妨害波の混入の有無を判定することができる。
【0017】
なお、ここでいう一致とは、必ずしも精密に一致している必要はなく、予め設定された許容誤差範囲内で一致していればよい。以下同様である。
また、請求項2に記載のレーダ装置では、請求項1に記載のレーダ装置と同様に、送受信手段にて送受信される電磁波の送信信号及び受信信号に基づいて、ビート信号生成手段がビート信号を生成し、ピーク抽出手段が、ビート信号生成手段が生成するビート信号の周波数解析を実行し、解析結果から信号強度がピークとなる信号成分であるピーク信号成分を抽出する。このピーク抽出手段にて抽出されたピーク信号成分に基づいて、物標情報生成手段が、電磁波を反射した物標に関する情報を求める。
【0018】
但し、請求項1に記載のレーダ装置とは異なり、送受信手段は、予め設定された変化率で周波数が変化する電磁波を送受信する通常測定モード、及び電磁波を送信することなく受信のみを行うノイズ測定モードで動作するように構成されている。そして、妨害波判定手段は、ノイズ測定モードでの動作時にピーク抽出手段にて抽出されたピーク信号成分をノイズ信号成分として、通常測定モードでの動作時にピーク抽出手段にて抽出されたピーク信号成分の中に、ノイズ信号成分との間で、少なくとも周波数が一致することを含む予め設定された一致条件が成立するものが存在する場合に、妨害波が混入しているものと判定する。
【0019】
つまり、ノイズ測定モードでの動作時には、物標からの反射波に基づくピーク信号成分が生じることはないため、ピーク抽出手段にて抽出されるピーク信号成分は、全てノイズに基づくもの、即ち、ノイズ信号成分となる。
【0020】
従って、これらノイズ信号成分(ノイズ測定モードで抽出されたピーク信号成分)と通常測定モードで抽出されたピーク信号成分とを比較することで、妨害波の有無を判定することができるのである。
【0021】
なお、一致条件には、請求項3に記載のように、ピーク信号成分の信号強度が一致することが含まれていてもよい。
つまり、同じノイズ源から到来する電磁波に基づくピーク信号成分の信号強度は、同じ大きさになるため、この条件を用いることにより、妨害波の有無の判定精度を向上させることができる。
【0022】
また、本発明のレーダ装置において、送受信手段は、電磁波の送信又は受信のうち少なくとも一方を複数のアンテナを用いて行い、ピーク抽出手段は、送信用のアンテナと受信用のアンテナの組合せであるチャンネル毎に周波数解析を実行すると共に、解析結果の周波数ビン毎に電磁波の到来方向を求めるように構成されていてもよい。この場合、一致条件には、請求項4に記載のように、ピーク信号成分を発生させた電磁波の到来方向が一致することが含まれていてもよい。
【0023】
つまり、同じノイズ源から到来する電磁波は、到来方向が同じであるため、この条件を用いることにより、妨害波の有無の判定精度を更に向上させることができる。
ところで本発明のレーダ装置は、請求項5に記載のように、妨害波判定手段にて妨害波が混入していると判定された場合、一致条件が成立したピーク信号成分を、物標情報生成手段の処理対象から除去する妨害波除去手段を備えていてもよい。この場合、妨害波が混入していても、その妨害波の影響を除去して物標の検出を継続することができる。
【0024】
また、請求項6に記載のように、妨害波判定手段にて妨害波が混入していると判定された場合、当該レーダ装置の機能を停止する機能停止手段を備えていてもよい。この場合、妨害波の影響によって誤った検出結果を出力してしまうことを確実に防止することができる。
【0025】
更に、請求項7に記載のように、妨害波判定手段にて妨害波が混入していると判定された場合、電波環境が異常である旨を報知する報知手段を備えていてもよい。この場合、レーダ装置による検出結果が妨害波の影響を受けている可能性があることを、使用者に認識させることができる。
【0026】
また、請求項8に記載のように、妨害波判定手段にて妨害波が混入していると判定された場合、一致条件が成立したピーク信号成分を妨害波由来ピークとして、物標情報生成手段では、妨害波由来ピークを、信頼度の低いピーク信号成分として取り扱うように構成されていてもよい。この場合、一致条件が偶然成立したピーク信号成分が存在した場合に、そのピーク信号成分の情報が利用されずに破棄されることを防止することができる。
【図面の簡単な説明】
【0027】
【図1】実施形態のレーダ装置の構成を表すブロック図である。
【図2】第1実施形態における動作制御処理の内容を表す説明図である。
【図3】第1実施形態における物標検出処理の内容を表すフローチャートである。
【図4】第2実施形態における動作制御処理の内容を表す説明図である。
【図5】第2実施形態における物標検出処理の内容を表すフローチャートである。
【図6】FMCWレーダの動作原理を示す説明図である。
【発明を実施するための形態】
【0028】
以下に本発明の実施形態を図面と共に説明する。
[第1実施形態]
<全体構成>
図1は、本実施形態の車載用レーダ装置の全体構成を表すブロック図である。
【0029】
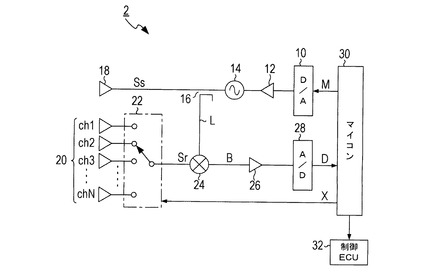
図1に示すように、本実施形態のレーダ装置2は、変調指令Mに従って、三角波状の変調信号を生成するD/A変換器10と、D/A変換器10にて生成された変調信号がバッファ12を介して印加され、その変調信号に従って発振周波数が変化する電圧制御発振器(VCO)14と、VCO14の出力を送信信号Ssとローカル信号Lとに電力分配する分配器16と、送信信号Ssに応じた電磁波(以下「レーダ波」という)を放射する送信アンテナ18とを備えている。
【0030】
また、レーダ装置2は、レーダ波を受信するN(本実施形態ではN=8)個の受信アンテナからなる受信側アンテナ部20と、受信側アンテナ部20を構成するアンテナのいずれかをタイミング信号Xに従って択一的に選択し、選択されたアンテナからの受信信号Srを後段に供給する受信スイッチ22と、受信スイッチ22から供給される受信信号Srにローカル信号Lを混合してビート信号Bを生成するミキサ24と、ミキサ24が生成したビート信号Bを増幅する増幅器26と、増幅器26にて増幅されたビート信号Bをタイミング信号Xに従ってサンプリングしてデジタルデータDに変換するA/D変換器28と、変調指令M及び変調指令Mに同期したタイミング信号Xを出力して、A/D変換器28からデジタルデータDを取り込み、そのデジタルデータDに基づく信号処理を実行することにより、レーダ波を反射した物標に関する情報(物標との距離や相対速度,物標が存在する方位等)を求めるマイクロコンピュータ(マイコン)30と、ドライバに対する視覚的又は聴覚的な報知や車を加速・減速等の制御をする制御ECU32とを備えている。
【0031】
このうち、VCO14は、三角波状の変調信号に従って、時間に対して周波数が直線的に漸増,漸減するよう変調されたミリ波帯の高周波信号を生成する。但し、生成する高周波信号の中心周波数がFo(例えば、76.5GHz)、周波数変動幅がΔF(例えば、最大100MHz)となるように設定されている。
【0032】
受信側アンテナ部20を構成する各アンテナは、そのビーム幅(正面方向に対する利得の低下が3dB以内の角度範囲)がいずれも送信アンテナ18のビーム幅全体を含むように設定されている。なお、各アンテナがそれぞれch1〜chNに割り当てられるものとする。
【0033】
受信スイッチ22は、周期がTp(例えば、200ns)のパルス列からなるタイミング信号Xに従って、全てのチャンネルch1〜chNが順番に選択されるように動作し、A/D変換器28は、タイミング信号Xに従ってチャンネルが切り替わる直前の信号レベルをA/D変換するように構成されている。
【0034】
なお、周期Tpは、受信スイッチ22の動作が保証される最短切替周期、或いはA/D変換器28の動作が保証される最短変換周期のうち、いずれか長い方以上の長さに設定すればよい。
【0035】
ミキサ24は、VCO14が生成する高周波信号の中心周波数Foを中心とする±数GHzの周波数範囲(以下「有効動作範囲」という)内の入力信号(受信信号Sr,ローカル信号L)を、両入力信号の差の周波数成分からなるビート信号に変換する。但し、ミキサ24は、有効動作範囲内の入力信号の一部や有効動作範囲外の入力信号も、減衰はするが周波数変換することなくそのまま通過させてしまうものが用いられている。
【0036】
また、マイコン30は、CPU,ROM,RAMを中心に構成され、更に、周波数解析(ここでは高速フーリエ変換(FFT))等の信号処理を実行する演算処理装置(例えばDSP)を備えている。
【0037】
また、マイコン30のCPUでは、変調指令M及びタイミング信号Xを生成することでレーダ装置2各部の動作を制御する動作制御処理と、演算処理装置での演算結果に基づいて、レーダ波を反射した物標に関する情報を求める物標検出処理とを少なくとも実行する。
【0038】
<動作制御処理>
動作制御処理は、マイコン30に電源供給が行われている間、周期的に起動し、レーダ装置2を2種類の動作モードで動作させる共に、各チャンネルから得られるビート信号Bをサンプリングする。
【0039】
なお、動作モードには、比較的遠距離(5m以上)に位置する物標を主として検出するための動作モードである遠距離測定モードと、比較的近距離(5m未満)に位置する物標を主として検出するための動作モードである近距離測定モードとがある。
【0040】
ここで図2は、動作制御処理の1サイクル中で各動作モードを実行する順番、及び各動作モードで用いる変調信号の波形(ひいてはレーダ波の送信周波数の変化)を示す説明図である。図2に示すように、動作制御処理が起動する毎に、遠距離測定モード(期間T1)、近距離測定モード(期間T2)の順に実行する。なお、両測定モードの実行順は逆でも良い。
【0041】
いずれの動作モードでも、三角波状の変調信号が用いられる。但し、遠距離測定モードより近距離測定モードの方が、変調信号の傾き(時間に対する変化率)が大きくなるように設定されている。
【0042】
つまり、動作制御処理では、図2に示す変調信号が生成されるような変調指令Mを出力すると共に、変調指令Mを出力している期間T1,T2の間、タイミング信号Xとして一定周期Tpのパルス信号を出力し続ける処理を実行することになる。
【0043】
但し、期間T1は、1チャンネル当たり所定個2×Nf(上り変調,下り変調のそれぞれでNf個ずつ。例えば、Nf=256。)のデジタルデータDを取得するのに要する長さ、即ち、T1=N×2Nf×Tpに設定されている。一方、期間T2は、1チャンネル当たり所定個2×Ne(例えば、Ne=128。)のデジタルデータDを取得するのに要する長さ、即ち、T2=N×2Ne×Tpに設定されている。
【0044】
このような動作制御処理を実行することにより、レーダ装置2では、VCO14が変調信号に従って生成した高周波信号を、分配器16が電力分配することにより、送信信号Ss及びローカル信号Lが生成され、このうち送信信号Ssは、送信アンテナ18を介してレーダ波として送出される。
【0045】
この送信アンテナ18から送出され物標に反射して戻ってきたレーダ波(反射波)は、受信側アンテナ部20を構成する全ての受信アンテナにて受信されるが、受信スイッチ22によって選択されている受信チャンネルchi(i=1〜N)の受信信号Srのみがミキサ24へ供給される。すると、ミキサ24では、この受信信号Srに分配器16からのローカル信号Lを混合することによりビート信号Bを生成し、増幅器26にて増幅されたビート信号Bは、A/D変換器28にて、タイミング信号Xに従ってサンプリングされマイコン30に取り込まれる。
【0046】
その結果、遠距離測定モード(期間T1)では、チャンネル(ch1〜chN)毎かつ変調種別(上り変調/下り変調)毎に、Nf個ずつのデジタルデータDが取得され、近距離測定モード(期間T2)では、チャンネル(ch1〜chN)毎かつ変調種別(上り変調/下り変調)毎に、Ne個ずつのデジタルデータDが取得されることになる。
【0047】
但し、受信信号Srのうち、ミキサ24の有効動作範囲内の信号成分は、ローカル信号Lとの差の周波数を有する信号成分(いわゆるビート信号B)に変換される。また、有効動作範囲内の信号成分の一部および有効動作範囲外の信号成分は、ミキサ24で減衰されるものの周波数変換されることなく通過する。
【0048】
そのため、受信信号Srにビート信号と同じ周波数帯の信号成分が含まれている場合、その信号成分はビート信号Bに重畳されることになる。
<物標検出処理>
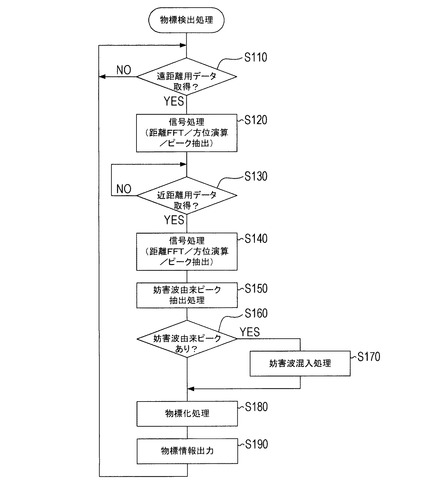
次に、物標検出処理の詳細を、図3に示すフローチャートに沿って説明する。
【0049】
本処理は、レーダ装置2が起動すると、上述の動作制御処理と共に起動される。
本処理が起動すると、まず、遠距離測定モードでの動作中にサンプリングされるデジタルデータDである遠距離用データの取得が完了したか否かを判断し(S110)、遠距離用データの取得が完了していなければ、完了するまで待機する。
【0050】
そして、遠距離用データの取得が完了したと判断されると、取得した遠距離用データに基づく信号処理を実行する(S120)。
この信号処理では、変調種別(上り変調/下り変調)毎に同様の処理を実行する。
【0051】
まず、チャンネル毎に距離FFTを実行すると共に、距離FFTでの解析結果(周波数スペクトル)から、信号強度がピークとなる信号成分(周波数ビン)を抽出し、抽出された周波数ビン毎に、方位演算(方位FFT)を実行する。
【0052】
これにより、ピーク信号成分毎に、そのピーク信号成分の周波数,信号強度、及びそのピーク信号成分を発生させた電磁波の到来方向が求められることになる。以下では、上り変調時の遠距離用データを信号処理することで抽出されたピーク信号成分を「遠距離上り変調ピーク」、下り変調時の遠距離用データを信号処理することで抽出されたピーク信号成分を「遠距離下り変調ピーク」、両者を総称して「遠距離ピーク」という。
【0053】
なお、距離FFTを行うことにより、ビート信号Bの信号成分のうち、サンプリング周波数fs(=1/(N×Tp))の1/2の周波数(検出可能なビート信号Bの上限周波数、以下単に「上限周波数」という。)以下の信号成分については、そのままの周波数で検出され、上限周波数を超える信号成分については、エイリアシングにより上限周波数で折り返(エイリアシング)され、上限周波数以下の周波数を有する信号成分として検出されることになる。
【0054】
遠距離用データに対する信号処理が終了すると、近距離測定モードでの動作中にサンプリングされるデジタルデータDである近距離用データの取得が完了したか否かを判断し(S130)、近距離用データの取得が完了していなければ、完了するまで待機する。
【0055】
そして、近距離用データの取得が完了したと判断されると、取得した近距離用データに基づく信号処理を実行する(S140)。なお、S140で実行する信号処理は、S120で実行する信号処理と同様のものである。以下では、上り変調時の近距離用データを信号処理することで抽出されたピーク信号成分を「近距離上り変調ピーク」、下り変調時の近距離用データを信号処理することで抽出されたピーク信号成分を「近距離下り変調ピーク」、両者を総称して「近距離ピーク」という。
【0056】
近距離用データに対する信号処理が終了すると、S120,140の信号処理で抽出されたピーク信号成分のうち、妨害波に由来するピークを抽出する妨害波由来ピーク抽出処理を実行する(S150)。
【0057】
この妨害波由来ピーク抽出処理では、ピーク信号成分の周波数(周波数ビン)及び信号強度、到来方向のいずれもが一致することを一致条件として、遠距離ピーク(遠距離上り変調ピーク又は遠距離下り変調ピーク)と近距離ピーク(近距離上り変調ピーク又は近距離下り変調ピーク)とを比較し、両者間で一致条件が成立するピーク信号成分が存在する場合に、そのピーク信号成分を妨害波由来ピークとして抽出する。但し、ここでいう一致とは、必ずしも厳密に一致している必要はなく、予め設定された許容周波数範囲、許容強度範囲、許容方位範囲内で一致していればよい。
【0058】
この妨害波由来ピーク抽出処理の結果、妨害波由来ピークが検出されたか否かを判断し(S160)、妨害波由来ピークが一つも検出されなければ、そのままS120,S140にて抽出されたピーク信号成分を使用して物標化処理(S180)、及び物標化処理により抽出された物標に関する情報を出力する物標情報出力処理(S190)を実行して、S110に戻る。
【0059】
なお、S180の物標化処理では、遠距離ピークと近距離ピークとで別々に処理を行う。具体的には、物標化処理は、上り変調ピークと下り変調ピークとで、同じ物標からの反射波に基づくピーク信号成分を組み合わせるペアマッチ、ペアマッチにより組み合わされたピーク信号成分(以下では「ピークペア」という)から求められるピークペア情報に基づき、前サイクルの物標化処理で抽出されたピークペアとの対応関係を特定する履歴接続、同一物標であると推定されるピークペアのセグメント化を行い、セグメント化されたピークペア毎に、物標に関する情報(距離,相対速度,方位等)を生成する情報生成などからなる周知の処理である。
【0060】
先のS160にて妨害波由来ピークが一つでも検出された場合には、妨害波混入処理(170)を実行後、上述した物標化処理(S180),物標情報出力処理(S190)を実行してS110に戻る。
【0061】
なお、S170の妨害波混入処理では、遠距離ピーク,近距離ピークの中から、妨害波由来ピークとして抽出されたピーク信号成分を除去する(即ち、物標化処理の処理対象から外す)と共に、制御ECU32に情報を出力すると共に、電波環境に異常があることを、制御ECU32を介してドライバに報知する。
【0062】
<効果>
以上説明したように、レーダ装置2によれば、距離FFTの解析結果から抽出されるピーク信号成分に妨害波由来ピークが混入しているか否かを判断することができ、また、妨害波由来ピークが混入している場合には、その妨害波由来ピークを、物標化処理の対象から除去しているため、物標検出の検出結果の信頼性を向上させることができる。
【0063】
なお、本実施形態において、VCO14,送信アンテナ18,受信側アンテナ部20が送受信手段、受信スイッチ22及びミキサ24がビート信号生成手段、S120及びS140を実行するマイコン30がピーク抽出手段、S180を実行するマイコン30が物標情報生成手段、S150及びS160を実行するマイコン30が妨害波判定手段、S170を実行するマイコン30及び制御ECU32が妨害波除去手段及び報知手段、遠距離測定モード及び近距離測定モードが第1測定モード及び第2測定モードに相当する。
【0064】
[第2実施形態]
次に、本発明の第2実施形態について説明する。
本実施形態では、マイコン30のCPUが実行する動作制御処理及び物標検出処理の一部が異なるだけであるため、この異なる部分を中心に説明する。
【0065】
<動作制御処理>
本実施形態における動作制御処理は、マイコン30に電源供給が行われている間、周期的に起動し、レーダ装置2を3種類の動作モードで動作させると共に、各チャンネルから得られるビート信号Bをサンプリングする。
【0066】
なお、動作モードには、上述した遠距離測定モード、近距離測定モードに加えて、レーダ波の送信を行うことなく受信動作を行い、受信信号(ミキサ24を通過したビート信号B)のサンプリングを行うノイズ測定モードがある。以下では、遠距離測定モード及び近距離測定モードを総称して、通常測定モードともいう。
【0067】
ここで図4は、動作制御処理の1サイクル中で各動作モードを実行する順番、及び各動作モードで用いる変調信号の波形(ひいてはレーダ波の送信周波数の変化)を示す説明図である。図4に示すように、動作制御処理が起動する毎に、遠距離測定モード(期間T1)、近距離測定モード(期間T2)、ノイズ測定モード(期間T3)の順に実行する。なお、各測定モードの実行順は任意で良い。
【0068】
なお、ノイズ測定モードで動作する期間T3は、1チャンネル当たり所定個Ns(本実施形態ではNs=256)のデジタルデータを取得するのに要する長さ、即ち、T3=N×Ns×Tpに設定されている。Nは任意の数で良い。
【0069】
つまり、ノイズ測定モード(期間T3)では、チャンネル(ch1〜chN)毎に、Ns個ずつのデジタルデータDが取得されることになる。
<物標検出処理>
次に、物標検出処理の詳細を、図5に示すフローチャートに沿って説明する。
【0070】
なお、本実施形態の物標検出処理では、S140の後に、S142〜S144の処理が実行され、更に、S150の代わりにS150とは処理内容の異なるS155の処理(妨害波由来ピーク抽出処理)が実行される点が、図3に示したフローチャートとは異なっている。
【0071】
即ち、S110〜S140の処理は第1実施形態の場合と同様であり、近距離用データに対する信号処理(S140)が終了すると、ノイズ測定モードでの動作中にサンプリングされるデジタルデータDである妨害波データの取得が完了したか否かを判断し(S142)、妨害波データの取得が完了していなければ、完了するまで待機する。
【0072】
そして、妨害波データの取得が完了したと判断されると、取得した妨害波データに基づく信号処理を実行する(S144)。なお、S144で実行する信号処理は、S120,140で実行する信号処理と同様のものである。但し、変調種別(上り変調/下り変調)は存在しないため、チャンネル毎に距離FFTが実行されることになる。以下では、妨害波データを信号処理することで抽出されたピーク信号成分を「ノイズ信号成分」という。
【0073】
妨害波データに対する信号処理が終了すると、S120,140の信号処理で抽出されたピーク信号成分のうち、妨害波に由来するピークを抽出する妨害波由来ピーク抽出処理を実行する(S155)。
【0074】
この妨害波由来ピーク抽出処理では、周波数(周波数ビン)お及び信号強度,到来方向のいずれもが一致することを一致条件として、遠距離上り変調ピーク又は遠距離下り変調ピーク,近距離上り変調ピーク,近距離下り変調ピークの中に、ノイズ信号成分との間で一致条件が成立するピーク信号成分が存在する場合に、そのピーク信号成分を妨害波由来ピークとして抽出する。但し、ここでいう一致とは、必ずしも性格に一致している必要はなく、予め設定された許容周波数範囲、許容強度範囲、許容方位範囲内で一致していればよい。
【0075】
以下、S160〜S190の処理は第1実施形態の場合と同様である。
<効果>
以上説明したように、本実施形態のレーダ装置2によれば、第1実施形態の場合と同様に、通常測定モードで得られたデジタルデータDを距離FFTした解析結果から抽出されるピーク信号成分に妨害波由来ピークが混入しているか否かを判断することができ、また、妨害波由来ピークが混入している場合には、その妨害波由来ピークを、物標化処理の対象から除去しているため、物標検出の検出結果の信頼性を向上させることができる。
【0076】
[他の実施形態]
以上本発明の実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において様々な態様にて実施することが可能である。
【0077】
例えば、上記実施形態では、複数チャンネルが単一のミキサ24を共有するように構成したが、チャンネル毎にミキサ24やA/D変換器28を設けるように構成してもよい。
また、上記実施形態では、送信用のアンテナを一つ、受信用のアンテナを複数設けることで、複数チャンネルを実現しているが、送信用のアンテナを複数、受信用のアンテナを一つとしたり、送信用及び受信用のアンテナをいずれも複数設けたりしてもよい。
【0078】
上記実施形態では、妨害波混入処理として、妨害波由来ピークの除去と、妨害波混入の報知とを行っているが、妨害波由来ピークを除去するのではなく、ピーク信号成分に妨害波由来ピークであるか否かを示すフラグを付与し、物標化処理(S180)では、妨害波由来ピークを、信頼度の低いピーク信号成分として取り扱うように構成してもよい。
【0079】
更に、上記実施形態では、妨害波由来ピークが検出されても物標化処理を継続しているが、妨害波由来ピークが検出された時には、物標化処理を中止して(機能停止手段に相当)、その旨を報知する(報知手段に相当)ように構成してもよい。
【0080】
上記実施形態では、周波数(周波数ビン),信号強度,到来方向のいずれもが一致することを一致条件としているが、信号強度または到来方向のいずれか一方を一致条件から省略してもよい。
【符号の説明】
【0081】
2…レーダ装置 10…D/A変換器 12…バッファ 14…電圧制御発振器(VCO) 16…分配器 18…送信アンテナ 20…受信側アンテナ部 22…受信スイッチ 24…ミキサ 26…増幅器 28…A/D変換器 30…マイクロコンピュータ(マイコン) 32…制御ECU
【技術分野】
【0001】
本発明は、周波数変調された電磁波を送受信することにより、電磁波を反射した物標を検出するレーダ装置に関する。
【背景技術】
【0002】
車両に搭載され、衝突防止等の制御に用いられるレーダ装置として、周波数変調された電磁波(FMCW波)をレーダ波として用いるFMCWレーダ装置が知られている。
FMCWレーダ装置では、図6(a)に実線で示すように、三角波状の変調信号により周波数変調され周波数が時間に対して直線的に漸次増減する送信信号Ssをレーダ波として送信し、物標により反射されたレーダ波(以下では「反射波」ともいう)を受信する。この時、受信信号Srは、図6(a)に点線で示すように、レーダ波が物標との間を往復するのに要する時間、即ち物標までの距離に応じた時間Trだけ遅延し、物標との相対速度に応じた周波数fdだけドップラシフトする。
【0003】
このような受信信号Srと送信信号Ssとをミキサで混合することにより、図6(b)に示すように、両信号Sr,Ssの差の周波数成分であるビート信号Bを発生させる。なお、送信信号Ssの周波数が増加する時のビート信号Bの周波数(以下「上り変調時のビート周波数」という)fb1と、送信信号Ssの周波数が減少する時のビート信号Bの周波数(以下「下り変調時のビート周波数」という)fb2とから、遅延時間Trに基づく周波数frは(1)式、ドップラシフト周波数fdは(2)式にて表される。
【0004】
そして、これらの周波数fr,fdに基づいて、(3)(4)式から物標との距離R及び相対速度Vを求めるようにされている。
【0005】
【数1】
【0006】
但し、cは電波伝搬速度,fmは送信信号の変調周波数,ΔFは送信信号の周波数変動幅,Foは送信信号の中心周波数である。
また、ビート周波数fb1,fb2の特定には一般に信号処理が用いられている。具体的には、ビート信号Bをサンプリングし、変調種別(上り変調/下り変調)毎に高速フーリエ変換(距離FFTともいう)を行うことにより、変調種別毎にビート信号Bの周波数分布を求め、信号強度がピークとなる周波数をビート周波数fb1,fb2としている。
【0007】
なお、ビート信号Bのサンプリング周波数fsは、周知のように、ビート信号Bの上限周波数の2倍以上に設定する必要がある。つまり、予め設定された検知範囲内に存在する物標からの反射波に基づいて生成されるビート信号Bの周波数成分が、この上限周波数以下の信号帯域内に入るようにレーダ波の変調幅ΔFや変調周期1/fmなどが設定される。
【0008】
そして、ミキサによってビート周波数の検出対象範囲内の周波数に変換されるノイズ、即ち、レーダ波に近い周波数を有するノイズを除去する手法は各種提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特許第4356758号
【発明の概要】
【発明が解決しようとする課題】
【0010】
ところで、車載用のFMCWレーダ装置には、通常、ミリ波帯(ギガヘルツ帯)の信号が用いられているため、ミキサには、ミリ波帯域の周波数を有する入力信号に対して有効に機能するものが使用されている。従って、ミリ波帯域外のビート信号の周波数(有効動作範囲外の例えばメガヘルツオーダ以下)を有する入力信号(ノイズ)は、周波数変換されることなくミキサを通過し、そのままビート信号に重畳されてしまう。
【0011】
そして、ビート信号に重畳されたノイズは、距離FFTを実行した時に、サンプリング周波数fsの1/2の周波数(即ち、ナイキスト周波数)以下であれば、そのままの周波数で検出され、ナイキスト周波数より大きい周波数であればナイキスト周波数以下の周波数に折り返されて検出されることとなる。
【0012】
ところが、このような有効動作範囲外のノイズへの対策はなされていないという問題があった。
本発明は、上記問題点を解決するために、周波数変調された電磁波を送受信し、その送受信信号に基づいて生成したビート信号を周波数解析することで各種情報を生成するレーダ装置において、ビート信号を生成する機器の有効動作範囲外で発生するノイズの有無を判定できるようにし、更には、そのノイズの影響を除去することを目的とする。
【課題を解決するための手段】
【0013】
上記課題を解決するための発明である請求項1に記載のレーダ装置では、送受信手段にて送受信される電磁波の送信信号及び受信信号に基づいて、ビート信号生成手段がビート信号を生成し、ピーク抽出手段が、ビート信号生成手段が生成するビート信号の周波数解析を実行し、解析結果から信号強度がピークとなる信号成分であるピーク信号成分を抽出する。このピーク抽出手段にて抽出されたピーク信号成分に基づいて、物標情報生成手段が、電磁波を反射した物標に関する情報を求める。
【0014】
但し、送受信手段は、予め設定された第1の変化率で周波数が変化する電磁波を送受信する第1測定モード、及び前記第1の変化率とは異なる第2の変化率で周波数が変化する電磁波を送受信する第2測定モードで動作するように構成されている。そして、妨害波判定手段は、第1測定モードでの動作時にピーク抽出手段にて抽出されたピーク信号成分と、第2測定モードでの動作時にピーク抽出手段にて抽出されたピーク信号成分とで、少なくとも周波数が一致することを含む予め設定された一致条件が成立するものが存在する場合に、妨害波が混入しているものと判定する。
【0015】
つまり、検出対象となる妨害波は、ビート信号生成手段が有効に機能する有効動作範囲外の周波数を有する信号であり、このような妨害波は、ビート信号生成手段にて周波数変換されることなくビート信号に重畳される。このため、第1測定モード及び第2測定モードに拘わらず、周波数解析によって得られる周波数分布(スペクトル)上には、少なくとも同じ周波数を有し、周波数以外の特徴(信号強度、到来方向等)も類似したピーク信号成分として現れることになる。
【0016】
従って、これら周波数や周波数以外の特徴を一致条件として、両測定モードで測定結果から得られたピーク信号成分を比較し、一致条件が成立するピーク信号成分が存在するか否かによって、妨害波の混入の有無を判定することができる。
【0017】
なお、ここでいう一致とは、必ずしも精密に一致している必要はなく、予め設定された許容誤差範囲内で一致していればよい。以下同様である。
また、請求項2に記載のレーダ装置では、請求項1に記載のレーダ装置と同様に、送受信手段にて送受信される電磁波の送信信号及び受信信号に基づいて、ビート信号生成手段がビート信号を生成し、ピーク抽出手段が、ビート信号生成手段が生成するビート信号の周波数解析を実行し、解析結果から信号強度がピークとなる信号成分であるピーク信号成分を抽出する。このピーク抽出手段にて抽出されたピーク信号成分に基づいて、物標情報生成手段が、電磁波を反射した物標に関する情報を求める。
【0018】
但し、請求項1に記載のレーダ装置とは異なり、送受信手段は、予め設定された変化率で周波数が変化する電磁波を送受信する通常測定モード、及び電磁波を送信することなく受信のみを行うノイズ測定モードで動作するように構成されている。そして、妨害波判定手段は、ノイズ測定モードでの動作時にピーク抽出手段にて抽出されたピーク信号成分をノイズ信号成分として、通常測定モードでの動作時にピーク抽出手段にて抽出されたピーク信号成分の中に、ノイズ信号成分との間で、少なくとも周波数が一致することを含む予め設定された一致条件が成立するものが存在する場合に、妨害波が混入しているものと判定する。
【0019】
つまり、ノイズ測定モードでの動作時には、物標からの反射波に基づくピーク信号成分が生じることはないため、ピーク抽出手段にて抽出されるピーク信号成分は、全てノイズに基づくもの、即ち、ノイズ信号成分となる。
【0020】
従って、これらノイズ信号成分(ノイズ測定モードで抽出されたピーク信号成分)と通常測定モードで抽出されたピーク信号成分とを比較することで、妨害波の有無を判定することができるのである。
【0021】
なお、一致条件には、請求項3に記載のように、ピーク信号成分の信号強度が一致することが含まれていてもよい。
つまり、同じノイズ源から到来する電磁波に基づくピーク信号成分の信号強度は、同じ大きさになるため、この条件を用いることにより、妨害波の有無の判定精度を向上させることができる。
【0022】
また、本発明のレーダ装置において、送受信手段は、電磁波の送信又は受信のうち少なくとも一方を複数のアンテナを用いて行い、ピーク抽出手段は、送信用のアンテナと受信用のアンテナの組合せであるチャンネル毎に周波数解析を実行すると共に、解析結果の周波数ビン毎に電磁波の到来方向を求めるように構成されていてもよい。この場合、一致条件には、請求項4に記載のように、ピーク信号成分を発生させた電磁波の到来方向が一致することが含まれていてもよい。
【0023】
つまり、同じノイズ源から到来する電磁波は、到来方向が同じであるため、この条件を用いることにより、妨害波の有無の判定精度を更に向上させることができる。
ところで本発明のレーダ装置は、請求項5に記載のように、妨害波判定手段にて妨害波が混入していると判定された場合、一致条件が成立したピーク信号成分を、物標情報生成手段の処理対象から除去する妨害波除去手段を備えていてもよい。この場合、妨害波が混入していても、その妨害波の影響を除去して物標の検出を継続することができる。
【0024】
また、請求項6に記載のように、妨害波判定手段にて妨害波が混入していると判定された場合、当該レーダ装置の機能を停止する機能停止手段を備えていてもよい。この場合、妨害波の影響によって誤った検出結果を出力してしまうことを確実に防止することができる。
【0025】
更に、請求項7に記載のように、妨害波判定手段にて妨害波が混入していると判定された場合、電波環境が異常である旨を報知する報知手段を備えていてもよい。この場合、レーダ装置による検出結果が妨害波の影響を受けている可能性があることを、使用者に認識させることができる。
【0026】
また、請求項8に記載のように、妨害波判定手段にて妨害波が混入していると判定された場合、一致条件が成立したピーク信号成分を妨害波由来ピークとして、物標情報生成手段では、妨害波由来ピークを、信頼度の低いピーク信号成分として取り扱うように構成されていてもよい。この場合、一致条件が偶然成立したピーク信号成分が存在した場合に、そのピーク信号成分の情報が利用されずに破棄されることを防止することができる。
【図面の簡単な説明】
【0027】
【図1】実施形態のレーダ装置の構成を表すブロック図である。
【図2】第1実施形態における動作制御処理の内容を表す説明図である。
【図3】第1実施形態における物標検出処理の内容を表すフローチャートである。
【図4】第2実施形態における動作制御処理の内容を表す説明図である。
【図5】第2実施形態における物標検出処理の内容を表すフローチャートである。
【図6】FMCWレーダの動作原理を示す説明図である。
【発明を実施するための形態】
【0028】
以下に本発明の実施形態を図面と共に説明する。
[第1実施形態]
<全体構成>
図1は、本実施形態の車載用レーダ装置の全体構成を表すブロック図である。
【0029】
図1に示すように、本実施形態のレーダ装置2は、変調指令Mに従って、三角波状の変調信号を生成するD/A変換器10と、D/A変換器10にて生成された変調信号がバッファ12を介して印加され、その変調信号に従って発振周波数が変化する電圧制御発振器(VCO)14と、VCO14の出力を送信信号Ssとローカル信号Lとに電力分配する分配器16と、送信信号Ssに応じた電磁波(以下「レーダ波」という)を放射する送信アンテナ18とを備えている。
【0030】
また、レーダ装置2は、レーダ波を受信するN(本実施形態ではN=8)個の受信アンテナからなる受信側アンテナ部20と、受信側アンテナ部20を構成するアンテナのいずれかをタイミング信号Xに従って択一的に選択し、選択されたアンテナからの受信信号Srを後段に供給する受信スイッチ22と、受信スイッチ22から供給される受信信号Srにローカル信号Lを混合してビート信号Bを生成するミキサ24と、ミキサ24が生成したビート信号Bを増幅する増幅器26と、増幅器26にて増幅されたビート信号Bをタイミング信号Xに従ってサンプリングしてデジタルデータDに変換するA/D変換器28と、変調指令M及び変調指令Mに同期したタイミング信号Xを出力して、A/D変換器28からデジタルデータDを取り込み、そのデジタルデータDに基づく信号処理を実行することにより、レーダ波を反射した物標に関する情報(物標との距離や相対速度,物標が存在する方位等)を求めるマイクロコンピュータ(マイコン)30と、ドライバに対する視覚的又は聴覚的な報知や車を加速・減速等の制御をする制御ECU32とを備えている。
【0031】
このうち、VCO14は、三角波状の変調信号に従って、時間に対して周波数が直線的に漸増,漸減するよう変調されたミリ波帯の高周波信号を生成する。但し、生成する高周波信号の中心周波数がFo(例えば、76.5GHz)、周波数変動幅がΔF(例えば、最大100MHz)となるように設定されている。
【0032】
受信側アンテナ部20を構成する各アンテナは、そのビーム幅(正面方向に対する利得の低下が3dB以内の角度範囲)がいずれも送信アンテナ18のビーム幅全体を含むように設定されている。なお、各アンテナがそれぞれch1〜chNに割り当てられるものとする。
【0033】
受信スイッチ22は、周期がTp(例えば、200ns)のパルス列からなるタイミング信号Xに従って、全てのチャンネルch1〜chNが順番に選択されるように動作し、A/D変換器28は、タイミング信号Xに従ってチャンネルが切り替わる直前の信号レベルをA/D変換するように構成されている。
【0034】
なお、周期Tpは、受信スイッチ22の動作が保証される最短切替周期、或いはA/D変換器28の動作が保証される最短変換周期のうち、いずれか長い方以上の長さに設定すればよい。
【0035】
ミキサ24は、VCO14が生成する高周波信号の中心周波数Foを中心とする±数GHzの周波数範囲(以下「有効動作範囲」という)内の入力信号(受信信号Sr,ローカル信号L)を、両入力信号の差の周波数成分からなるビート信号に変換する。但し、ミキサ24は、有効動作範囲内の入力信号の一部や有効動作範囲外の入力信号も、減衰はするが周波数変換することなくそのまま通過させてしまうものが用いられている。
【0036】
また、マイコン30は、CPU,ROM,RAMを中心に構成され、更に、周波数解析(ここでは高速フーリエ変換(FFT))等の信号処理を実行する演算処理装置(例えばDSP)を備えている。
【0037】
また、マイコン30のCPUでは、変調指令M及びタイミング信号Xを生成することでレーダ装置2各部の動作を制御する動作制御処理と、演算処理装置での演算結果に基づいて、レーダ波を反射した物標に関する情報を求める物標検出処理とを少なくとも実行する。
【0038】
<動作制御処理>
動作制御処理は、マイコン30に電源供給が行われている間、周期的に起動し、レーダ装置2を2種類の動作モードで動作させる共に、各チャンネルから得られるビート信号Bをサンプリングする。
【0039】
なお、動作モードには、比較的遠距離(5m以上)に位置する物標を主として検出するための動作モードである遠距離測定モードと、比較的近距離(5m未満)に位置する物標を主として検出するための動作モードである近距離測定モードとがある。
【0040】
ここで図2は、動作制御処理の1サイクル中で各動作モードを実行する順番、及び各動作モードで用いる変調信号の波形(ひいてはレーダ波の送信周波数の変化)を示す説明図である。図2に示すように、動作制御処理が起動する毎に、遠距離測定モード(期間T1)、近距離測定モード(期間T2)の順に実行する。なお、両測定モードの実行順は逆でも良い。
【0041】
いずれの動作モードでも、三角波状の変調信号が用いられる。但し、遠距離測定モードより近距離測定モードの方が、変調信号の傾き(時間に対する変化率)が大きくなるように設定されている。
【0042】
つまり、動作制御処理では、図2に示す変調信号が生成されるような変調指令Mを出力すると共に、変調指令Mを出力している期間T1,T2の間、タイミング信号Xとして一定周期Tpのパルス信号を出力し続ける処理を実行することになる。
【0043】
但し、期間T1は、1チャンネル当たり所定個2×Nf(上り変調,下り変調のそれぞれでNf個ずつ。例えば、Nf=256。)のデジタルデータDを取得するのに要する長さ、即ち、T1=N×2Nf×Tpに設定されている。一方、期間T2は、1チャンネル当たり所定個2×Ne(例えば、Ne=128。)のデジタルデータDを取得するのに要する長さ、即ち、T2=N×2Ne×Tpに設定されている。
【0044】
このような動作制御処理を実行することにより、レーダ装置2では、VCO14が変調信号に従って生成した高周波信号を、分配器16が電力分配することにより、送信信号Ss及びローカル信号Lが生成され、このうち送信信号Ssは、送信アンテナ18を介してレーダ波として送出される。
【0045】
この送信アンテナ18から送出され物標に反射して戻ってきたレーダ波(反射波)は、受信側アンテナ部20を構成する全ての受信アンテナにて受信されるが、受信スイッチ22によって選択されている受信チャンネルchi(i=1〜N)の受信信号Srのみがミキサ24へ供給される。すると、ミキサ24では、この受信信号Srに分配器16からのローカル信号Lを混合することによりビート信号Bを生成し、増幅器26にて増幅されたビート信号Bは、A/D変換器28にて、タイミング信号Xに従ってサンプリングされマイコン30に取り込まれる。
【0046】
その結果、遠距離測定モード(期間T1)では、チャンネル(ch1〜chN)毎かつ変調種別(上り変調/下り変調)毎に、Nf個ずつのデジタルデータDが取得され、近距離測定モード(期間T2)では、チャンネル(ch1〜chN)毎かつ変調種別(上り変調/下り変調)毎に、Ne個ずつのデジタルデータDが取得されることになる。
【0047】
但し、受信信号Srのうち、ミキサ24の有効動作範囲内の信号成分は、ローカル信号Lとの差の周波数を有する信号成分(いわゆるビート信号B)に変換される。また、有効動作範囲内の信号成分の一部および有効動作範囲外の信号成分は、ミキサ24で減衰されるものの周波数変換されることなく通過する。
【0048】
そのため、受信信号Srにビート信号と同じ周波数帯の信号成分が含まれている場合、その信号成分はビート信号Bに重畳されることになる。
<物標検出処理>
次に、物標検出処理の詳細を、図3に示すフローチャートに沿って説明する。
【0049】
本処理は、レーダ装置2が起動すると、上述の動作制御処理と共に起動される。
本処理が起動すると、まず、遠距離測定モードでの動作中にサンプリングされるデジタルデータDである遠距離用データの取得が完了したか否かを判断し(S110)、遠距離用データの取得が完了していなければ、完了するまで待機する。
【0050】
そして、遠距離用データの取得が完了したと判断されると、取得した遠距離用データに基づく信号処理を実行する(S120)。
この信号処理では、変調種別(上り変調/下り変調)毎に同様の処理を実行する。
【0051】
まず、チャンネル毎に距離FFTを実行すると共に、距離FFTでの解析結果(周波数スペクトル)から、信号強度がピークとなる信号成分(周波数ビン)を抽出し、抽出された周波数ビン毎に、方位演算(方位FFT)を実行する。
【0052】
これにより、ピーク信号成分毎に、そのピーク信号成分の周波数,信号強度、及びそのピーク信号成分を発生させた電磁波の到来方向が求められることになる。以下では、上り変調時の遠距離用データを信号処理することで抽出されたピーク信号成分を「遠距離上り変調ピーク」、下り変調時の遠距離用データを信号処理することで抽出されたピーク信号成分を「遠距離下り変調ピーク」、両者を総称して「遠距離ピーク」という。
【0053】
なお、距離FFTを行うことにより、ビート信号Bの信号成分のうち、サンプリング周波数fs(=1/(N×Tp))の1/2の周波数(検出可能なビート信号Bの上限周波数、以下単に「上限周波数」という。)以下の信号成分については、そのままの周波数で検出され、上限周波数を超える信号成分については、エイリアシングにより上限周波数で折り返(エイリアシング)され、上限周波数以下の周波数を有する信号成分として検出されることになる。
【0054】
遠距離用データに対する信号処理が終了すると、近距離測定モードでの動作中にサンプリングされるデジタルデータDである近距離用データの取得が完了したか否かを判断し(S130)、近距離用データの取得が完了していなければ、完了するまで待機する。
【0055】
そして、近距離用データの取得が完了したと判断されると、取得した近距離用データに基づく信号処理を実行する(S140)。なお、S140で実行する信号処理は、S120で実行する信号処理と同様のものである。以下では、上り変調時の近距離用データを信号処理することで抽出されたピーク信号成分を「近距離上り変調ピーク」、下り変調時の近距離用データを信号処理することで抽出されたピーク信号成分を「近距離下り変調ピーク」、両者を総称して「近距離ピーク」という。
【0056】
近距離用データに対する信号処理が終了すると、S120,140の信号処理で抽出されたピーク信号成分のうち、妨害波に由来するピークを抽出する妨害波由来ピーク抽出処理を実行する(S150)。
【0057】
この妨害波由来ピーク抽出処理では、ピーク信号成分の周波数(周波数ビン)及び信号強度、到来方向のいずれもが一致することを一致条件として、遠距離ピーク(遠距離上り変調ピーク又は遠距離下り変調ピーク)と近距離ピーク(近距離上り変調ピーク又は近距離下り変調ピーク)とを比較し、両者間で一致条件が成立するピーク信号成分が存在する場合に、そのピーク信号成分を妨害波由来ピークとして抽出する。但し、ここでいう一致とは、必ずしも厳密に一致している必要はなく、予め設定された許容周波数範囲、許容強度範囲、許容方位範囲内で一致していればよい。
【0058】
この妨害波由来ピーク抽出処理の結果、妨害波由来ピークが検出されたか否かを判断し(S160)、妨害波由来ピークが一つも検出されなければ、そのままS120,S140にて抽出されたピーク信号成分を使用して物標化処理(S180)、及び物標化処理により抽出された物標に関する情報を出力する物標情報出力処理(S190)を実行して、S110に戻る。
【0059】
なお、S180の物標化処理では、遠距離ピークと近距離ピークとで別々に処理を行う。具体的には、物標化処理は、上り変調ピークと下り変調ピークとで、同じ物標からの反射波に基づくピーク信号成分を組み合わせるペアマッチ、ペアマッチにより組み合わされたピーク信号成分(以下では「ピークペア」という)から求められるピークペア情報に基づき、前サイクルの物標化処理で抽出されたピークペアとの対応関係を特定する履歴接続、同一物標であると推定されるピークペアのセグメント化を行い、セグメント化されたピークペア毎に、物標に関する情報(距離,相対速度,方位等)を生成する情報生成などからなる周知の処理である。
【0060】
先のS160にて妨害波由来ピークが一つでも検出された場合には、妨害波混入処理(170)を実行後、上述した物標化処理(S180),物標情報出力処理(S190)を実行してS110に戻る。
【0061】
なお、S170の妨害波混入処理では、遠距離ピーク,近距離ピークの中から、妨害波由来ピークとして抽出されたピーク信号成分を除去する(即ち、物標化処理の処理対象から外す)と共に、制御ECU32に情報を出力すると共に、電波環境に異常があることを、制御ECU32を介してドライバに報知する。
【0062】
<効果>
以上説明したように、レーダ装置2によれば、距離FFTの解析結果から抽出されるピーク信号成分に妨害波由来ピークが混入しているか否かを判断することができ、また、妨害波由来ピークが混入している場合には、その妨害波由来ピークを、物標化処理の対象から除去しているため、物標検出の検出結果の信頼性を向上させることができる。
【0063】
なお、本実施形態において、VCO14,送信アンテナ18,受信側アンテナ部20が送受信手段、受信スイッチ22及びミキサ24がビート信号生成手段、S120及びS140を実行するマイコン30がピーク抽出手段、S180を実行するマイコン30が物標情報生成手段、S150及びS160を実行するマイコン30が妨害波判定手段、S170を実行するマイコン30及び制御ECU32が妨害波除去手段及び報知手段、遠距離測定モード及び近距離測定モードが第1測定モード及び第2測定モードに相当する。
【0064】
[第2実施形態]
次に、本発明の第2実施形態について説明する。
本実施形態では、マイコン30のCPUが実行する動作制御処理及び物標検出処理の一部が異なるだけであるため、この異なる部分を中心に説明する。
【0065】
<動作制御処理>
本実施形態における動作制御処理は、マイコン30に電源供給が行われている間、周期的に起動し、レーダ装置2を3種類の動作モードで動作させると共に、各チャンネルから得られるビート信号Bをサンプリングする。
【0066】
なお、動作モードには、上述した遠距離測定モード、近距離測定モードに加えて、レーダ波の送信を行うことなく受信動作を行い、受信信号(ミキサ24を通過したビート信号B)のサンプリングを行うノイズ測定モードがある。以下では、遠距離測定モード及び近距離測定モードを総称して、通常測定モードともいう。
【0067】
ここで図4は、動作制御処理の1サイクル中で各動作モードを実行する順番、及び各動作モードで用いる変調信号の波形(ひいてはレーダ波の送信周波数の変化)を示す説明図である。図4に示すように、動作制御処理が起動する毎に、遠距離測定モード(期間T1)、近距離測定モード(期間T2)、ノイズ測定モード(期間T3)の順に実行する。なお、各測定モードの実行順は任意で良い。
【0068】
なお、ノイズ測定モードで動作する期間T3は、1チャンネル当たり所定個Ns(本実施形態ではNs=256)のデジタルデータを取得するのに要する長さ、即ち、T3=N×Ns×Tpに設定されている。Nは任意の数で良い。
【0069】
つまり、ノイズ測定モード(期間T3)では、チャンネル(ch1〜chN)毎に、Ns個ずつのデジタルデータDが取得されることになる。
<物標検出処理>
次に、物標検出処理の詳細を、図5に示すフローチャートに沿って説明する。
【0070】
なお、本実施形態の物標検出処理では、S140の後に、S142〜S144の処理が実行され、更に、S150の代わりにS150とは処理内容の異なるS155の処理(妨害波由来ピーク抽出処理)が実行される点が、図3に示したフローチャートとは異なっている。
【0071】
即ち、S110〜S140の処理は第1実施形態の場合と同様であり、近距離用データに対する信号処理(S140)が終了すると、ノイズ測定モードでの動作中にサンプリングされるデジタルデータDである妨害波データの取得が完了したか否かを判断し(S142)、妨害波データの取得が完了していなければ、完了するまで待機する。
【0072】
そして、妨害波データの取得が完了したと判断されると、取得した妨害波データに基づく信号処理を実行する(S144)。なお、S144で実行する信号処理は、S120,140で実行する信号処理と同様のものである。但し、変調種別(上り変調/下り変調)は存在しないため、チャンネル毎に距離FFTが実行されることになる。以下では、妨害波データを信号処理することで抽出されたピーク信号成分を「ノイズ信号成分」という。
【0073】
妨害波データに対する信号処理が終了すると、S120,140の信号処理で抽出されたピーク信号成分のうち、妨害波に由来するピークを抽出する妨害波由来ピーク抽出処理を実行する(S155)。
【0074】
この妨害波由来ピーク抽出処理では、周波数(周波数ビン)お及び信号強度,到来方向のいずれもが一致することを一致条件として、遠距離上り変調ピーク又は遠距離下り変調ピーク,近距離上り変調ピーク,近距離下り変調ピークの中に、ノイズ信号成分との間で一致条件が成立するピーク信号成分が存在する場合に、そのピーク信号成分を妨害波由来ピークとして抽出する。但し、ここでいう一致とは、必ずしも性格に一致している必要はなく、予め設定された許容周波数範囲、許容強度範囲、許容方位範囲内で一致していればよい。
【0075】
以下、S160〜S190の処理は第1実施形態の場合と同様である。
<効果>
以上説明したように、本実施形態のレーダ装置2によれば、第1実施形態の場合と同様に、通常測定モードで得られたデジタルデータDを距離FFTした解析結果から抽出されるピーク信号成分に妨害波由来ピークが混入しているか否かを判断することができ、また、妨害波由来ピークが混入している場合には、その妨害波由来ピークを、物標化処理の対象から除去しているため、物標検出の検出結果の信頼性を向上させることができる。
【0076】
[他の実施形態]
以上本発明の実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において様々な態様にて実施することが可能である。
【0077】
例えば、上記実施形態では、複数チャンネルが単一のミキサ24を共有するように構成したが、チャンネル毎にミキサ24やA/D変換器28を設けるように構成してもよい。
また、上記実施形態では、送信用のアンテナを一つ、受信用のアンテナを複数設けることで、複数チャンネルを実現しているが、送信用のアンテナを複数、受信用のアンテナを一つとしたり、送信用及び受信用のアンテナをいずれも複数設けたりしてもよい。
【0078】
上記実施形態では、妨害波混入処理として、妨害波由来ピークの除去と、妨害波混入の報知とを行っているが、妨害波由来ピークを除去するのではなく、ピーク信号成分に妨害波由来ピークであるか否かを示すフラグを付与し、物標化処理(S180)では、妨害波由来ピークを、信頼度の低いピーク信号成分として取り扱うように構成してもよい。
【0079】
更に、上記実施形態では、妨害波由来ピークが検出されても物標化処理を継続しているが、妨害波由来ピークが検出された時には、物標化処理を中止して(機能停止手段に相当)、その旨を報知する(報知手段に相当)ように構成してもよい。
【0080】
上記実施形態では、周波数(周波数ビン),信号強度,到来方向のいずれもが一致することを一致条件としているが、信号強度または到来方向のいずれか一方を一致条件から省略してもよい。
【符号の説明】
【0081】
2…レーダ装置 10…D/A変換器 12…バッファ 14…電圧制御発振器(VCO) 16…分配器 18…送信アンテナ 20…受信側アンテナ部 22…受信スイッチ 24…ミキサ 26…増幅器 28…A/D変換器 30…マイクロコンピュータ(マイコン) 32…制御ECU
【特許請求の範囲】
【請求項1】
予め設定された第1の変化率で周波数が変化する電磁波を送受信する第1測定モード、及び前記第1の変化率とは異なる第2の変化率で周波数が変化する電磁波を送受信する第2測定モードで動作する送受信手段と、
前記送受信手段が送受信する電磁波の送信信号及び受信信号に基づいてビート信号を生成するビート信号生成手段と、
該ビート信号生成手段が生成するビート信号の周波数解析を実行し、解析結果から信号強度がピークとなる信号成分であるピーク信号成分を抽出するピーク抽出手段と、
前記ピーク抽出手段にて抽出されたピーク信号成分に基づいて、前記電磁波を反射した物標に関する情報を求める物標情報生成手段と、
前記第1測定モードでの動作時に前記ピーク抽出手段にて抽出されたピーク信号成分と、前記第2測定モードでの動作時に前記ピーク抽出手段にて抽出されたピーク信号成分とで、少なくとも周波数が一致することを含む予め設定された一致条件が成立するものが存在する場合に、妨害波が混入しているものと判定する妨害波判定手段と、
を備えることを特徴とするレーダ装置。
【請求項2】
予め設定された変化率で周波数が変化する電磁波を送受信する通常測定モード、及び電磁波を送信することなく受信のみを行うノイズ測定モードで動作する送受信手段と、
前記送受信手段が送受信する電磁波の送信信号と受信信号とに基づいてビート信号を生成するビート信号生成手段と、
該ビート信号生成手段が生成するビート信号の周波数解析を実行し、解析結果から信号強度がピークとなる信号成分であるピーク信号成分を抽出するピーク抽出手段と、
前記ピーク抽出手段にて抽出されたピーク信号成分に基づいて、前記電磁波を反射した物標に関する情報を求める物標情報生成手段と、
前記ノイズ測定モードでの動作時に前記ピーク抽出手段にて抽出されたピーク信号成分をノイズ信号成分として、前記通常測定モードでの動作時に前記ピーク抽出手段にて抽出されたピーク信号成分の中に、前記ノイズ信号成分との間で、少なくとも周波数が一致することを含む予め設定された一致条件が成立するものが存在する場合に、妨害波が混入しているものと判定する妨害波判定手段と、
を備えることを特徴とするレーダ装置。
【請求項3】
前記一致条件には、前記ピーク信号成分の強度が一致することが含まれていることを特徴とする請求項1又は請求項2に記載のレーダ装置。
【請求項4】
前記送受信手段は、前記電磁波の送信又は受信のうち少なくとも一方を複数のアンテナを用いて行い、
前記ピーク抽出手段は、送信用のアンテナと受信用のアンテナの組合せであるチャンネル毎に周波数解析を実行すると共に、解析結果の周波数ビン毎に電磁波の到来方向を求め、
前記一致条件には、前記ピーク信号成分を発生させた電磁波の到来方向が一致することが含まれていることを特徴とする請求項1乃至請求項3のうちいずれか1項に記載のレーダ装置。
【請求項5】
前記妨害波判定手段にて妨害波が混入していると判定された場合、前記一致条件が成立したピーク信号成分を、前記物標情報生成手段の処理対象から除去する妨害波除去手段を備えることを特徴とする請求項1乃至請求項4のいずれか1項に記載のレーダ装置。
【請求項6】
前記妨害波判定手段にて妨害波が混入していると判定された場合、当該レーダ装置の機能を停止する機能停止手段を備えることを特徴とする請求項1乃至請求項4のいずれか1項に記載のレーダ装置。
【請求項7】
前記妨害波判定手段にて妨害波が混入していると判定された場合、電波環境が異常である旨を報知する報知手段を備えることを特徴とする請求項1乃至請求項6のいずれか1項に記載のレーダ装置。
【請求項8】
前記妨害波判定手段にて妨害波が混入していると判定された場合、前記一致条件が成立したピーク信号成分を妨害波由来ピークとして、前記物標情報生成手段では、前記妨害波由来ピークを、信頼度の低いピーク信号成分として取り扱うことを特徴とする請求項1乃至請求項4のいずれか1項に記載のレーダ装置。
【請求項1】
予め設定された第1の変化率で周波数が変化する電磁波を送受信する第1測定モード、及び前記第1の変化率とは異なる第2の変化率で周波数が変化する電磁波を送受信する第2測定モードで動作する送受信手段と、
前記送受信手段が送受信する電磁波の送信信号及び受信信号に基づいてビート信号を生成するビート信号生成手段と、
該ビート信号生成手段が生成するビート信号の周波数解析を実行し、解析結果から信号強度がピークとなる信号成分であるピーク信号成分を抽出するピーク抽出手段と、
前記ピーク抽出手段にて抽出されたピーク信号成分に基づいて、前記電磁波を反射した物標に関する情報を求める物標情報生成手段と、
前記第1測定モードでの動作時に前記ピーク抽出手段にて抽出されたピーク信号成分と、前記第2測定モードでの動作時に前記ピーク抽出手段にて抽出されたピーク信号成分とで、少なくとも周波数が一致することを含む予め設定された一致条件が成立するものが存在する場合に、妨害波が混入しているものと判定する妨害波判定手段と、
を備えることを特徴とするレーダ装置。
【請求項2】
予め設定された変化率で周波数が変化する電磁波を送受信する通常測定モード、及び電磁波を送信することなく受信のみを行うノイズ測定モードで動作する送受信手段と、
前記送受信手段が送受信する電磁波の送信信号と受信信号とに基づいてビート信号を生成するビート信号生成手段と、
該ビート信号生成手段が生成するビート信号の周波数解析を実行し、解析結果から信号強度がピークとなる信号成分であるピーク信号成分を抽出するピーク抽出手段と、
前記ピーク抽出手段にて抽出されたピーク信号成分に基づいて、前記電磁波を反射した物標に関する情報を求める物標情報生成手段と、
前記ノイズ測定モードでの動作時に前記ピーク抽出手段にて抽出されたピーク信号成分をノイズ信号成分として、前記通常測定モードでの動作時に前記ピーク抽出手段にて抽出されたピーク信号成分の中に、前記ノイズ信号成分との間で、少なくとも周波数が一致することを含む予め設定された一致条件が成立するものが存在する場合に、妨害波が混入しているものと判定する妨害波判定手段と、
を備えることを特徴とするレーダ装置。
【請求項3】
前記一致条件には、前記ピーク信号成分の強度が一致することが含まれていることを特徴とする請求項1又は請求項2に記載のレーダ装置。
【請求項4】
前記送受信手段は、前記電磁波の送信又は受信のうち少なくとも一方を複数のアンテナを用いて行い、
前記ピーク抽出手段は、送信用のアンテナと受信用のアンテナの組合せであるチャンネル毎に周波数解析を実行すると共に、解析結果の周波数ビン毎に電磁波の到来方向を求め、
前記一致条件には、前記ピーク信号成分を発生させた電磁波の到来方向が一致することが含まれていることを特徴とする請求項1乃至請求項3のうちいずれか1項に記載のレーダ装置。
【請求項5】
前記妨害波判定手段にて妨害波が混入していると判定された場合、前記一致条件が成立したピーク信号成分を、前記物標情報生成手段の処理対象から除去する妨害波除去手段を備えることを特徴とする請求項1乃至請求項4のいずれか1項に記載のレーダ装置。
【請求項6】
前記妨害波判定手段にて妨害波が混入していると判定された場合、当該レーダ装置の機能を停止する機能停止手段を備えることを特徴とする請求項1乃至請求項4のいずれか1項に記載のレーダ装置。
【請求項7】
前記妨害波判定手段にて妨害波が混入していると判定された場合、電波環境が異常である旨を報知する報知手段を備えることを特徴とする請求項1乃至請求項6のいずれか1項に記載のレーダ装置。
【請求項8】
前記妨害波判定手段にて妨害波が混入していると判定された場合、前記一致条件が成立したピーク信号成分を妨害波由来ピークとして、前記物標情報生成手段では、前記妨害波由来ピークを、信頼度の低いピーク信号成分として取り扱うことを特徴とする請求項1乃至請求項4のいずれか1項に記載のレーダ装置。
【図1】

【図2】

【図3】
【図4】

【図5】

【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−96903(P2013−96903A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−241376(P2011−241376)
【出願日】平成23年11月2日(2011.11.2)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年11月2日(2011.11.2)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]