
Fターム[5J070BF02]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 危険度判定 (267) | 距離 (113)
Fターム[5J070BF02]に分類される特許
1 - 20 / 113
物体識別装置、および物体識別プログラム
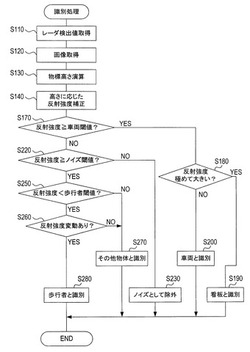
【課題】車両の周囲に存在する物体の種別を識別する物体識別装置において、物体を正確に識別できるようにする。
【解決手段】衝突防止システムにおいては、自車両の周囲に音波または電磁波を照射して該音波または電磁波の反射波を検出することによって得られた、反射強度および自車両周囲の物体までの距離の情報を含む物体情報を取得し(S110)、物体の高さの情報を取得する(S130)。そして、物体の高さおよび物体までの距離に応じて反射強度を補正し(S140)、補正後の反射強度に応じて物体の種別を識別する(S170〜S280)。よって、反射強度を正常に検出することを妨害する要素を除外するように反射強度を補正することができ、正確に反射強度を検出できるようにすることで、物体を正確に識別することができる。
(もっと読む)
自律移動システム、その制御方法及びプログラム

【課題】距離検出手段の揺動範囲を適切に設定し、最適に障害物を検知できる自律移動システム、その制御方法及びプログラムを提供すること。
【解決手段】自律移動システムは、移動体に設けられ、検出領域内の障害物の距離を検出する距離検出手段と、距離検出手段の検出領域をヨー方向へ揺動させる揺動手段と、揺動手段の揺動を制御する揺動制御手段と、を備えている。また、揺動制御手段は、障害物の位置に応じて、揺動手段を制御して距離検出手段の検出領域の揺動範囲を制限している。
(もっと読む)
衝突回避装置、ヘリコプタ、及び衝突回避プログラム
【課題】ヘリコプタが障害物に近接した状態でも、ヘリコプタの障害物への衝突を回避する飛行を可能とする、ことを目的とする。
【解決手段】ヘリコプタ10は、GPS受信部34によって、受信したGPS信号に基づいて自機の位置を検知し、距離センサ18によって、自機と周囲の障害物との距離を測定する。そして、ヘリコプタ10は、詳細情報生成部40によって、地図情報記憶装置52に記憶されている地図情報から距離センサ18で検知した自機の位置を含む自機周囲情報を読み出し、読み出した自機周囲情報と距離センサ18による測定結果とから、自機の周囲の形状を示す自機周囲詳細情報を生成し、飛行制御部32によって、自機周囲詳細情報と自機の大きさとに基づいて、自機が障害物へ衝突することを抑制するための制御を行う。
(もっと読む)
アンテナ装置、レーダ装置、車載レーダシステム
【課題】単一の基板に形成されているにも拘わらず、180°を越えるような広い検知エリアをカバーできるアンテナ装置、そのアンテナ装置を利用したレーダ装置、車載レーダシステムを提供する。
【解決手段】アンテナ基板6の面方向を主放射方向とする平面放射用アンテナ部3と、アンテナ基板6の端方向を主照射方向とする水平放射用アンテナ部4とを、アンテナ基板6の異なるパターン形成層に形成する。これにより、両アンテナ部3,4を同一のパターン形成層に形成する場合と比較して、水平放射用アンテナ部4の指向性をより部品載置面6b側にシフトさせることができる。その結果、単一のアンテナ基板6でカバー可能な検知エリアを広角化(例えば、180°以上)することができる。
(もっと読む)
走行支援装置
【課題】車両の前進時と後退時とで検知対象とすべき障害物に応じた適切な検知が可能な走行支援装置を提供する。
【解決手段】車両11の前方の障害物を検知するレーダ14と後方の障害物を検知するソナー12とを備え、車両の前進時及び後退時にレーダ14及びソナー12により検知された障害物と車両11との接触を防止するように車両11の走行を制御するPCS ECU20を備えるため、前進時及び後退時の両方で障害物と車両11との接触を防止することが可能となる。また、レーダ14は、ソナー12とは異なる種類のセンサであり、ソナー12よりも車両11から長距離に位置する障害物を検知することが可能であるため、後退時の比較的に低速な速度域と、前進時の比較的に高速な速度域とに応じて、検知対象とすべき障害物と車両11との位置関係に応じた適切な検知が可能となる。
(もっと読む)
移動体衝突防止装置及び該装置を搭載した移動体
【課題】移動体の衝突を防止する移動体衝突防止装置に関する。
【解決手段】移動体に配置され、他の移動体との間で信号を送受信する移動体衝突防止装置10であって、測定波を送信する送信部120と、前記送信部に接続され、該送信部を駆動する駆動信号を生成し該送信部を駆動する送信駆動部110と、前記他の移動体から送信された測定波を受信する受信部130と、前記受信部が受信した測定波の強度により、前記移動体と前記他の移動体の間の相対位置を計算する計算部140と、前記計算部によって計算された結果に基づいて前記移動体が前記他の移動体と衝突するか否かを判断する衝突判断部150とを備える。
(もっと読む)
走行支援装置
【課題】車両の前方の検出領域において、車両の進路に向かって横方向から検出領域に進入した物体を極力速く検出して警報を指令するとともに、誤検出を考慮して不適切な衝突回避の実行を防止する走行支援装置を提供する。
【解決手段】走行支援装置は、検出領域の外部から検出領域に、車両の進路に向かって横方向から進入した物体の横移動速度が所定速度以上であり、かつ物体と車両との距離が所定距離以下である場合(S402:Yes)、検出領域の範囲内で通常警報領域の側方に通常警報領域よりも横方向に広がる拡張警報領域を設定する(S408)。車両支援装置は、通常警報領域の外部の拡張警報領域の範囲内であれば(S410:No)、運転者によりブレーキ操作およびステアリング操作がなされておらず、車両と物体との衝突予測時間が所定の警報時間以下の場合(S412:Yes)、運転者に対する警報だけを車両制御ECUに指令する(S414)。
(もっと読む)
先行車検知装置
【課題】継続して存在する先行車が一時的に先行車と認識できなくなった場合に、その車両を先行車として早期に再認識することが可能な先行車検知装置の提供。
【解決手段】ECU5は、物体検知センサ2が今回検出した検出物体が前回よりも以前に検出された既検出の物体と同一であると推定した場合、その既検出の先行車の先行車適合情報を今回検出した物体の先行車適合情報として設定する引継ぎ処理を実行し、引き継がれた先行車適合情報に基づいて先行車の認定を行う。
(もっと読む)
衝突予測装置
【課題】自車の前方に検出されたターゲットの自車に対する相対位置に応じて、当該ターゲットが自車の左側を通過するか、または右側を通過するかを予測し、自車とターゲットとの衝突可能性を適切に推定する衝突予測装置を提供する。
【解決手段】本発明の衝突予測装置は、自車の前方にターゲットを検出するターゲット検出手段と、ターゲットの自車に対する相対位置を算出する相対位置算出手段と、当該相対位置に基づいて、ターゲットが、自車の左側を通過するか、または右側を通過するかを示す通過予測情報を設定する通過予測情報設定手段と、相対位置の変化を監視する相対位置監視手段と、相対位置の変化に基づいて、通過予測情報設定手段によって設定された通過予測情報を変更する通過予測情報変更手段と、通過予測情報に基づいて、自車とターゲットとの衝突可能性を推定する衝突可能性推定手段とを備える。
(もっと読む)
車載用レーダ装置及び車載用レーダシステム
【課題】多周波変調異常を検出する機能を有する車載用レーダ装置を提供する。
【解決手段】2周波CW変調処理部101のように、送受信信号のIF信号に位相差が発生するような変調処理方式と、FM変調処理部102のように、送受信信号から得られるドップラ周波数がターゲット距離に応じて変動するような特性を持つ変調方式を有し、前記位相差から算出されるターゲット距離と、前記ドップラ周波数の変動量から算出されるターゲット距離の差分が所定値以上になった場合、多周波変調処理が異常であると判断することができる。
(もっと読む)
自動車の安全装置および自動車
【課題】通行人や二輪車が、側後方の安全確認がなされずに開けられてしまった自動車の側部ドアと衝突する事故を未然に防止するとともに使い勝手のよい安全装置を提供すること。
【解決手段】自動車が停車中で側部ドアが閉状態であり、自動車の側後方の物体が自動車に到達するまでの到達予想時間が予め定められた所定の値以下の場合に音または表示により注意喚起を行う注意喚起モードと、注意喚起モード中に、すべての側部ドアが閉じられており、すべての側部ドアそれぞれのドアロックスイッチがロック側にある場合に移行するモードであって、物体側の側部ドアのドアロックスイッチがロック解除側へ操作されると操作されたドアロックスイッチをロック側へ戻す制御を行うドアロック制御モードとを有することを特徴とする自動車の安全装置などにより、この課題を解決する。
(もっと読む)
障害物検出装置
【課題】近距離においても物標の位置を精度良く得る。
【解決手段】センサ2で物標を検出する障害物検出装置1において、センサ2により物標が検出されていた状態から該物標が検出できない状態となったときに、センサ2により物標が検出されていた状態のときの該物標の位置及び速度情報と、センサ2で物標を検出することができなくなったときからの経過時間と、から、センサ2により物標を検出できないときの該物標の位置を推定する推定手段83を備える。
(もっと読む)
衝突被害軽減装置
【課題】衝突被害軽減装置の誤動作を低減する。
【解決手段】GPS装置により測位された現在位置Pcから所定距離D内に、障害物測定波を反射して障害物として誤測定される可能性がある停止物の位置Psが存在するか否を判定する(S8〜S11)。また、車両進行方向に位置する障害物との相対速度V及び障害物までの距離Lに基づいて、障害物に衝突するまでの衝突時間tを演算する(S16〜S18)。そして、現在位置Pcから所定距離D内に停止物の位置Psが存在せず、且つ、衝突時間tが所定閾値t2以下となったときに、ブレーキを自動的に作動させる。このため、予め記憶されている停止物の位置Psの近傍ではブレーキが自動的に作動しないことから、ブレーキの誤作動を低減することができる。
(もっと読む)
信号処理装置、レーダ装置、車両制御システム、信号処理方法、および、プログラム
【課題】物体情報を正確に検出できるレーダ装置を提供する。
【解決手段】連続する複数回の物体検出処理において、同一の物体に係る物体情報が連続的に検出されるかを判定する。過去の物体検出処理において検出された物体情報に基づいて、この物体情報の略整数倍の物体情報を有する特定物体情報を検出し、特定物体情報が検出された場合には、特定物体情報の物体情報を整数で除算した物体情報を有する予測物体情報を仮想的に設定する。そして、物体情報の設定は直近の物体検出処理において検出される物体情報と、前記予測物体情報とのいずれも判定対象とする。これにより、物体情報を正確に検出できる。
(もっと読む)
温度補償される距離検出装置
【課題】車両のバンパに適用する場合等、厳しい使用環境下においても短時間で回路が安定し、また、温度変化に対して距離検出精度の変化の少ない距離検出装置を提供する。
【解決手段】距離検出装置は、送信アンテナ1と受信アンテナ2と送信回路部3と受信回路部4とからなる。送信回路部3は、送信アンテナ1から送信される電波信号を生成する電波信号生成部31と、温度変化による電波信号の振幅変動を補償する振幅温度補償部32とを有する。受信回路部4は、受信サンプリング信号を生成する受信サンプリング信号生成部41と、受信アンテナ2により受信する電波信号と受信サンプリング信号とを用いて対象物までの距離を算出する演算処理部10と、温度変化による受信サンプリング信号の位相変動を補償する位相温度補償部42とを有する。
(もっと読む)
レーダ装置
【課題】簡単な構成で、固有拡散符号で処理を行っている間および共通拡散符号で処理を行っている間に車間距離等を検出することができるレーダ装置の提供。
【解決手段】固有拡散符号で拡散する第1変調部と、共通拡散符号で拡散する第2変調部と、第1変調部で拡散された信号をレーダ波として第1の期間に送信し、第2変調部で拡散された信号をレーダ波として第2の期間に送信する送信部と、共通拡散符号で拡散された信号を干渉信号として共通拡散符号で逆拡散する第1復調部と、受信部で受信された信号から干渉信号を除去する干渉信号除去部と、干渉信号が除去された信号を固有拡散符号で逆拡散する第2復調部と、共通拡散符号で拡散された信号を当該共通拡散符号で逆拡散する第3復調部と、自車両から他車両までの距離を検出する距離検出部とを備える。
(もっと読む)
避退指示装置
【課題】 従来、航空機等の移動体に対して、目標物や目標物に向けて発射される飛しょう体からの避退を指示する場合、オペレータの判断により手動で避退指示を与えていたため、指示タイミングが遅れる、また最適な避退針路でない恐れがあった。
【解決手段】 飛しょう体情報記憶部より読み込む飛しょう体の発射位置及び発射速度と目標情報記憶部より読み込む目標の位置と速度と針路とに基づき飛しょう体を目標に会合させる針路を算出する飛しょう体針路算出部と、目標の針路及び求めた飛しょう体の針路と移動体情報記憶部より読み込む移動体の位置とに基づき避退する移動体を判定する避退対象判定部と、避退対象の移動体の位置及び速度と飛しょう体の針路及び目標の針路とに基づき移動体の避退針路を算出する避退針路算出部と、避退針路算出部より出力される避退針路を移動体に指示する避退指示部と、を備える避退指示装置である。
(もっと読む)
車載表示装置
【課題】ヘッドライトの点灯が必要な走行時に、安全かつ快適に車間距離の確保を運転者に促すことが可能な車載表示装置を提供する。
【解決手段】車載表示装置1では、制御部10が、各センサ及びスイッチ類2〜6からの入力情報に基づいて各種処理を実行し、ピクセルライト7を介して、自車両に対する前方側の路面上に照明光を照射し、画像デバイス8を介して、ピクセルライト7の投射領域に、安全車間距離を表す指標画像を表示する。このため、安全車間距離を表す指標画像が車両前方の道路(実像)上に表示されるため、運転者の視線が車外前方から外れずに済むと共に、運転者の焦点が実像上の指標画像に合いやすくなり、例えば夜間や夕方におけるヘッドライト6の点灯が必要な走行時に、安全かつ快適に車間距離の確保を運転者に促すことができる。
(もっと読む)
物体検出装置
【課題】路側物近傍を走行する車両の位置を正確に検出する。
【解決手段】物体検出装置1は、車両に搭載され、レーダセンサからなる第1センサ24とは相違するセンサである第2センサ21〜23を介して、該車両の周囲に存在する物体を検出する路側物検出部11と、路側物検出部11によって路側物が検出されているか否かを判定する判定部12と、判定部12によって路側物が検出されていると判定された場合に、第2センサ21〜23を介して、前記路側物の位置情報を取得する位置取得部13と、位置取得部13によって取得された前記路側物の位置情報に基づいて、第1センサ24を介して、前記路側物の近傍を走行する他の車両を検出する車両検出部14と、を備える。
(もっと読む)
レーダ装置
【課題】受信アンテナの個数を多くすることなく、多くの物体の方位を高精度に検出する。
【解決手段】レーダ装置1の制御部11は、複数個の送信信号を生成し、各送信信号を、それぞれ、送信部12を介して互いに相違する領域に向けて送出する送信指示部111と、受信部13を介して、前記複数個の送信信号にそれぞれ対応する受信信号を受信し、受信された受信信号毎に、MUSIC法等を用いて、物体の存在する方位(=前記受信信号の到来する方位)を高分解能で検出する受信信号処理部114と、を備える。
(もっと読む)
1 - 20 / 113
[ Back to top ]