
Fターム[5J070BF10]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 監視方向又は範囲 (317) | 方向又は範囲を定めるもの (67)
Fターム[5J070BF10]に分類される特許
61 - 67 / 67
車両における対象検出方法および対象検出装置

対象検出システムを搭載した車両における対象検出方法および装置であって、対象検出システムは、電磁波を送出して検出領域内の対象で反射された波を受信し、認識された対象で反射され、付加的に車道に沿って延びる対象で反射された波を評価する。この評価は妥当性を評価するものであって、その妥当性の評価においては間接的な対象反射によって直接測定された対象反射が検証される。あるいはその前に検出された対象からもはや反射が測定できない場合に、それ以降の対象検出に間接的な対象反射を利用することにある。 (もっと読む)
車載レーダアンテナ用整列装置
車輌(14)のフレーム(2)に対するレーダアンテナ(16)の放射方向(D)を確立するための整列装置(4)および方法が開示してある。この整列装置は、このフレームの縦方向と垂直に配置し且つこのフレームに固定してあり、およびたこのアンテナの放射方向(D)がディスプレイスクリーン(20)に向くように配置してあるディスプレイスクリーンを含む。信号(26、27)をこのスクリーンの方へ、このアンテナの放射方向Dと実質的に同じ方向に向けて送ることにより、この車輌の移動方向(B)に対するアンテナの放射方向を、フレームの位置に対する車輌駆動軸(8)の位置に基づいて、および信号がこのスクリーンに当る点(30)に基づいて確立することを可能にする。  (もっと読む)
(もっと読む)
レーダ装置

【課題】 本発明は、通常動作時でも、各アンテナの受信特性変化を判断し、補正処理を行い、工場出荷時の初期調整で補正でき、また、動作中の環境変化による温度変動に、或いは経年劣化に対応して随時補正でき、常に精度向上を図れるレーダ装置を提供する。
【解決手段】 複数の送受信アンテナで、送信波のターゲットTからの反射波を受信し、方位検出、距離測定、速度測定の認識処理を行うレーダ装置で、例えば、アンテナA1からの送信波W11が反射波W12としてアンテナA2で受信され、次に切替えられ、アンテナA2からの送信波W21が反射波W22としてアンテナA1で受信される。送信波W11と反射波W12の経路と送信波W21と反射波W22の経路とは同一空間系を有し、反射波W12の受信信号と反射波22の受信信号とが同じ周波数特性、位相を有することを利用してアンテナの受信特性変化を判断し、該結果で受信信号を補正処理する。
(もっと読む)
前方監視MM波地形回避レーダを有するレーダ高度計
レーダ信号を送信するための送信器(12)と、反射レーダ信号を受信するための受信器と、送信器および受信器の一方または両方に結合された少なくとも1つのアンテナ(20、24)とを含むレーダ高度計(10)について述べる。高度計はまた、走査運動で運動するように構成された前向きミリメートル波(MMW)アンテナ(34)、MMWアンテナ、送信器、および受信器に結合された周波数アップ/ダウンコンバータ(18)、ならびにレーダ信号プロセッサ(30)を含む。コンバータは、MMWアンテナを介して送信するために、送信器から受け取った周波数をMMW周波数にアップコンバートし、受信された周波数を、受信器に出力されるレーダ周波数にダウンコンバートする。レーダ信号プロセッサは、MMWアンテナの走査運動を制御し、走査運動の一部分についてアンテナ部で受信された信号を処理し、走査運動の他の部分についてMMWアンテナ部で受信された信号を処理する。 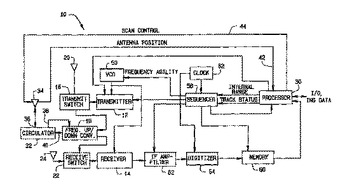 (もっと読む)
(もっと読む)
前方測距能力を備えたレーダ高度計
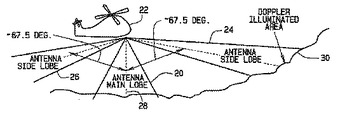
レーダ高度計(50)に前方測距法を持たせる方法が記載される。この方法では、レーダ信号の副ローブ(24)がアンテナから前方に放射されるように高度計のアンテナを配置し、副ローブのレーダエコーを処理して前方対象物(30)までの距離を決定する。
 (もっと読む)
(もっと読む)
信号待ち居眠り目覚まし器
【課題】 車の運転中における,信号待ち等の時間に睡眠を取るための目覚まし器に関する
【解決手段】 車を運転中,赤信号等で停止した時,自分の車の前に停止している車との距離を測定し,この距離の変化を監視しながら,距離がが変化したとき運転者に目覚まし信号を発信することを特徴とした目覚まし器。
(もっと読む)
物体の検出方法、障害物検出方法及び障害物検出装置
【課題】より短時間で一定範囲内の物体を検出できるようにすることである。
【解決手段】筐体21を所定角度範囲回転させて、遠距離用アンテナ11a、中距離用アンテナ11b、短距離用アンテナ11cから同時に電波を放射し、それぞれの反射波を受信して一定範囲内の物体を検出する(図3,S11)。処理装置13は、遠距離用アンテナ11a、中距離用アンテナ11b、短距離用アンテナ11cの反射波から得られるそれぞれの検出データをマージして一定範囲内にある物体の検出データを得る(S13)。さらに、その検出データから障害物を抽出する(S14)。
(もっと読む)
61 - 67 / 67
[ Back to top ]