
Fターム[5J070BF10]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 監視方向又は範囲 (317) | 方向又は範囲を定めるもの (67)
Fターム[5J070BF10]に分類される特許
21 - 40 / 67
車両周辺監視装置
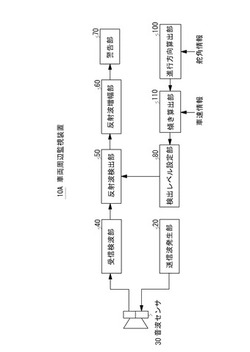
【課題】 車両から遠くにある物体を感度良く検出しつつ、検出不要な物体を区別することができる「車両周辺監視装置」を提供する。
【解決手段】 周辺車両検出装置10は、送信波発生部20、送信信号に基づき超音波を送信しかつその反射波を受信する超音波センサ30、超音波センサ30で受信した信号を検波する受信検波部40、検波結果に基づき反射波の受信信号を検出する反射波検出部50、反射波の受信信号を増幅する反射波増幅部60、反射波増幅部60で増幅された信号を用いて警告等を発する警告部70、反射波検出部50の検出レベルを設定する検出レベル設定部80とを含む。
検出レベル設定部80は、車両から物体までの距離が遠ざかるにつれて検出レベルが小さくなるような負の傾きを持つ関数として設定する。
(もっと読む)
物体検知装置

【課題】 物体検知手段で検知した物体の自車に対する相対位置を速やかに、かつ精度良く算出する。
【解決手段】 相対位置予測手段M3が相対関係算出手段M1bにより算出された物体の今回検知時における相対位置および相対速に基づいて、複数の経過時間後における相対位置を予測し、相対位置出力手段M4が相対関係算出手段M1bの算出結果に基づいて前記予測された複数の予測位置の何れか一つを今回検知時点における相対位置として出力する。今回検知時における相対位置に基づいて車両制御を行う場合に比べて、予測した将来の相対位置に基づいて車両制御を行うことでタイムラグを最小限に抑えることができ、しかも予測した複数の相対位置のうちの何れか一つを選択して出力するので、タイムラグの減少および出力する相対位置の精度をバランス良く両立させることができる。
(もっと読む)
距離計測装置の検査装置
【課題】実車搭載を含めた車両システムとしての種々の模擬走行機能検査を可能とする距離計測装置の検査装置を提供する。
【解決手段】電磁波を発信し、その発信方向先方の物体に反射した反射波の受信時間から当該物体との距離又は距離に関する情報を検出する距離計測装置を検査するにあたり、距離計測装置から発信される電磁波を受信部1で受信し、遅延発生部11で所定の遅延時間、遅延した後、疑似反射波発信部2から距離計測装置に向けて疑似反射波を発信する構成とし、制御回路17は、遅延発生部11による疑似反射波の所定の遅延時間を変更設定することにより、例えば車間距離に応じた遅延時間を設定することで種々の車間距離の計測精度を検査することができる。また、疑似反射波の強弱を制御可能とすることにより、天候や環境によって変化する電磁波の透過変動を再現することができる。
(もっと読む)
物体検出装置
【課題】簡単な構成によって路面かあるいは路面上の物体かを判別する物体検出装置を提供することを課題とする。
【解決手段】路面上に存在する物体を検出する物体検出装置1であって、物体の位置を検出する位置検出手段10,21と、位置検出手段10,21で検出する際の少なくとも鉛直方向の検出角度を設定する検出角度設定手段24と、検出角度設定手段24によって設定された検出角度に変化させた前後で位置検出手段10,21によって所定時間間隔でそれぞれ検出された各位置の変化に基づいて路面か又は路面上の物体かを判定する判定手段25とを備えることを特徴とする。
(もっと読む)
車両用走行安全装置
【課題】検知する物体が移動物体の場合や、自車がカーブを走行中の場合であっても、送受信手段に軸ずれが生じているか否かを的確に判定することができる車両用走行安全装置の提供。
【解決手段】複数の送受信手段2L,2Rが備えられており、軸ずれ判定手段は、第1の送受信手段2Lの受信結果に基づいてセグメント形成手段により形成された第1のセグメントSLと、第2の送受信手段2Rの受信結果に基づいてセグメント形成手段により形成された第2のセグメントSRとが、離れた状態から重なった場合に送受信手段2L,2Rに軸ずれが生じていると判定する。
(もっと読む)
衝突検出装置
【課題】本発明の目的は、自車の側方から接近してくる他車を効率的に検知することができる、衝突検出装置を提供する。
【解決手段】衝突検出装置は、自車前方右側の他車を検出する右側レーダと、自車前方左側の他車を検出する左側レーダと、制御部と、安全システムとを備える。制御部は、各レーダの検出結果に基づいて、自車の側方より接近してくる他車と衝突の危険があるか否か、衝突が避けられるか否かを判断する。安全システムは、制御部からの指示に従って、ドライバーに注意喚起をしたり、ブレーキ操作をアシストしたりする、安全処置を行う。また、各レーダの検出方向中心軸は、車両の直進方向に対して左右いずれかの方向に20°乃至60°の範囲内の向きに設定される。
(もっと読む)
車両用移動可能範囲検出装置
【課題】 駐車スペースに駐車するための自車の移動可能範囲の有無を的確に判断することが可能な車両用移動可能範囲検出装置を提供する。
【解決手段】 レーダー装置11で所定の時間間隔で自車周辺の水平方向の所定角度範囲を走査するように電磁波を送信し、所定の処理領域内に存在する電磁波の反射点との車幅方向における距離の総和が最小となる直線を車幅方向境界線として算出するとともに、自車の車長方向における距離の総和が最小となる直線を車長方向境界線として算出し、左右の車幅方向境界線の車幅方向における距離のうちで最小距離を、自車が駐車のために移動可能な移動可能範囲として算出するので、その移動可能範囲を精度良く算出することが可能となり、移動可能範囲が不足しているのに駐車スペースSpに駐車可能であると誤判定されるのを防止することができる。
(もっと読む)
レーダ装置、レーダ制御装置およびレーダ装置の制御方法
【課題】検出精度が高くかつ検出時間の短縮が可能なレーダ装置、レーダ制御装置およびレーダ装置の制御方法を提供すること。
【解決手段】本発明は、レーダ波を受信する複数のアンテナ22と、複数のアンテナ22毎に得られたビート信号を用い、複数の検出角度における対象物を検出する検出手段14と、検出手段14が検出した対象物から演算用対象物を選択し、演算用対象物の位置情報に基づき、検出手段14が次に対象物を検出する複数の検出角度のうちの一部の検出角度の間隔を他の検出角度の間隔と異なるように変更する演算手段16と、を具備するレーダ装置、レーダ制御装置およびレーダ装置の制御方法である。
(もっと読む)
物体検出装置および物体検出方法
【課題】 検出点の変化に伴う相対速度の誤算出を防止でき、物体の検出精度を高めることができる物体検出装置を提供する。
【解決手段】 レーザレーダ1と、生成された複数の検出点のうち、同一物体であると推定される検出点をグループ化するグルーピング部31と、同一グループに含まれる各検出点と自車の距離を平均化し、当該平均距離の時間的差分に基づいて検出物体の自車に対する相対速度を算出する相対速度算出部32と、を備えた物体検出装置において、相対速度算出部32は、同一グループに含まれる検出点の個数が変化した場合、検出点の個数が変化する直前に算出した相対速度を維持する。
(もっと読む)
物体検出装置
【課題】二つの検知手段の検知結果に基づいてゴースト判定を行うことにより、適切な物体検出が行える物体検出装置を提供すること。
【解決手段】車両2の前方にある物体を検知するレーダ5、及び車両2の前側方にある物体を検知するレーダ3、4を備え、レーダ5により物体をトラッキングしている際にその物体より近距離の位置に他の物体が検知された場合、レーダ3、4の検知結果に基づいて他の物体をレーダ5トラッキングの対象とするか否かを判断して物体検出を行う。この場合、レーダ3、4の検知結果に基づいて他の物体をレーダ5のトラッキングの対象とするか否かを判断することにより、他の物体が大型車の反射などによるゴーストであるか否かを的確に判断することできる。
(もっと読む)
レーダ装置、物体検出方法、及び車両
【課題】車載レーダ装置を用いて車両の制御を行う場合、データ処理を早く行うため物体検出範囲を適切に制御する必要がある。従来はビーム出射強度を調整していたが、ビームの強度は距離に応じて徐々に減衰するため、物体の検出範囲を適切に設定することは困難であった。また、広角近距離用と狭角遠距離用のレーダ装置を使い分ける方法では、2つのレーダ装置を設置しなければならないという問題があった。装置を複雑化せずに検出範囲を適切に設定できる方法を提供する。
【解決手段】物体に向けてビームを出射する手段と、前記物体からの反射波を受信する手段と、車両の走行状況に応じて物体検出範囲を設定する手段と、前記受信信号と前記物体検出範囲の情報とに基づいて物体を検出する手段とを有するレーダ装置により、容易に検出範囲を制限できるので処理負荷が軽減され、データ処理速度を改善できる。
(もっと読む)
車輌ドアシステム
【課題】停車位置に応じたきめ細かいセンシング領域設定を行い、シチュエーションに応じた適切なドア制御を実行する車輌ドアシステムを提供する。
【解決手段】障害物に対するドアの接触防止のための制御を行う車輌ドアシステムであって、車輌が停車状態であるか否かに係る情報を取得する自車輌情報取得部200と、車輌の現在位置が路上であるのか駐車スペースであるのかに係る情報を取得するナビゲーション部300と、ドア幅程度の距離の監視を行う近距離周辺監視用センサ部540と、遠くの距離の監視を行う遠距離後方監視用センサ部510と、ドアの接触防止のための制御を行うドア制御部600と、を有し、該自車輌情報取得部200で取得した情報及び該ナビゲーション部300で取得した情報に応じて、該近距離周辺監視用センサ部540及び/又は遠距離後方監視用センサ部510を稼働させて、該ドア制御部600のドアの制御を行う。
(もっと読む)
感知可能な動き検出器
幾らかの実施形態では、第1の調節可能なレンズを有する第1のセンサと、第2の調節可能なレンズを有する第2のセンサと、を備える装置が開示される。コントローラは、第1のセンサおよび第2のセンサに連結される。コントローラは、第1モードにおいて第1のセンサおよび第2のセンサを独立して動作させ、第2モードにおいて第1の動きセンサおよび2の動きセンサを相互依存させて動作させる。 (もっと読む)
物体検出装置、及び車両用制御装置
【課題】必要な量の情報を出力しつつ通信負荷を軽減することが可能な物体検出装置を提供すること。
【解決手段】移動体に搭載される物体検出装置(10A、10B)であって、電磁波を放射すると共に放射した電磁波の反射波を受信する電磁波放射受信手段(12)と、電磁波放射受信手段が検出した反射波のデータに基づいて反射点を特定する反射点特定手段(18)と、反射点特定手段により特定された反射点のうち、絶対速度ベクトルが略同一線上にある反射点が同一グループとなるように、反射点特定手段により特定された反射点をグループ化してグループを生成するグループ生成手段(22)と、グループ生成手段により生成されたグループについて代表点を設定する代表点設定手段(24)と、を備え、代表点設定手段により設定された代表点に関する情報を出力する物体検出装置。
(もっと読む)
物体検出装置
【課題】
静止物か否かを的確に判定し静止物を精度よく検出できる物体検出装置を提供すること。
【解決手段】
測距センサ2によって他の車両61、62などの検出対象物までの相対位置を検出し、その検出結果と自車両10の位置検出センサ3の検出結果に基づいて検出対象物の絶対位置を算出し、その検出対象物が同一位置に所定時間継続して検出されている場合にその検出対象物が静止物であると判定する。この場合、未知の物体に対しその物体が静止物であるか否かを判断することができる。
(もっと読む)
レーダ装置
【課題】1台のレーダ装置で、ハードウェア構成を変更することなく、距離によって検知角度を変更し、車両制御システムが必要とする範囲でのみ、目標物体の検知を行うことができるレーダ装置を提供する。
【解決手段】送信信号として電磁波を送信する送信手段と、目標物体によって反射した電磁波を受信信号として受信する受信手段と、車両周辺に存在する目標物体を送信信号と受信信号から検知し、自車両との相対位置や相対速度を算出する信号処理手段とを備え、測定する距離によって、検知角度を変化させることにより、車両制御システムを動作させる上で必要となる領域でのみ、目標物体を検知する。
(もっと読む)
表示制御装置、方法およびプログラム
【課題】ドライバーが周囲に存在する物体の状況を認知しやすい表示制御装置を提供する。
【解決手段】車両周囲を撮像する撮像部と、音波、電波、またはレーザを照射し反射波を受信することにより、あるいは、上記撮像部からの撮像画像を処理することにより、周囲の障害物の有無、あるいは、距離や方向を検知する物体検知センサと、物体検知センサの制御値を設定し検知領域を所定の条件に応じて変化させる検知領域判断部と、検知領域判断部の制御値に基づき決定される物体検知センサの検知領域を車両周囲を撮像した撮像画像に重畳して表示させ、運転者に検知領域の情報を提供する表示制御部とを備える構成とする。
(もっと読む)
車載用レーダシステム
【課題】角度確定可能範囲外であっても反射波を受信可能な領域に存在するターゲットに対応することができる車載用レーダシステムを提供する。
【解決手段】電波を送信する送信してターゲットから反射される電波を受信し、得られたターゲット信号からターゲットの距離、相対速度及び方位角度を算出し、ターゲットの方位角度は、所定の角度確定範囲において算出可能であり、ターゲット信号からターゲットが前記角度確定範囲内かどうかを判定して、前記角度確定範囲内にターゲットがあると判定した場合、ターゲットの距離、相対速度及び方位角度に基づいて前記ターゲットが自車に衝突する危険性があるかどうかを判定し、前記角度確定範囲外にターゲットがあると判定した場合、ターゲットの距離及び相対速度に基づいて前記ターゲットが自車に衝突する危険性があるかどうかを判定する。
(もっと読む)
投光装置
【課題】投射光軸の走査振幅及び光軸調整を容易に行い、且つ高い調整精度を得ることのできる光レーダ用の投光装置を提供することである。
【解決手段】レーザダイオード31が放射した光線の投射方向が投射レンズ37で設定される。この投射レンズ37の位置は位置検出器43a、43bで検出される。上記光線の投光方向はスキャナ制御部25によって投射レンズ37の位置に変換される。上記スキャナ制御部25により得られた投射レンズ37の目標位置と、位置検出器43a、43bで検出された投射レンズ37の検出位置を基に、アクチュエータ40の駆動がスキャナ制御部25によって制御される。上記光線の特定の目標投射方向に対する投光装置の投射方向のずれは、スキャナ制御部25内のメモリ53に補正値として記憶され、この補正値でもって補正されて投射レンズ37の位置に変換される。
(もっと読む)
踏切障害物検知装置
【課題】レーダ送信波が踏切内の探知範囲全体をカバーして旋回されているか否かを従来よりも一層確実に検出できるようにして、装置の信頼性を高めた踏切障害物検知装置を提供する。
【解決手段】旋回手段42と旋回角度設定手段43とによって旋回制御されるレーダ送受信手段41の旋回角度の両端の境界位置をそれぞれ検出する旋回境界位置検出手段44(44a,44b)、この旋回境界位置検出手段44でレーダ送受信手段41の旋回動作が検出されない場合には旋回異常と判断してその旨を外部に報知する旋回異常報知手段45とを備えている。
(もっと読む)
21 - 40 / 67
[ Back to top ]