
Fターム[5J070BF11]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 衝突回避 (511)
Fターム[5J070BF11]の下位に属するFターム
警報 (149)
表示 (44)
避航操作(船舶等) (7)
自動制御(自動車等) (225)
Fターム[5J070BF11]に分類される特許
81 - 86 / 86
船舶位置表示装置
【課題】 船舶から送信される船舶識別信号の送信時間間隔が長くなっても、またはその船舶識別信号の受信不可能な時間が長くなっても、その船舶の位置や状態(針路、船速、停船の有無等の状態)の把握および推定が容易な船舶位置表示装置を構成する。
【解決手段】 船舶から所定時間間隔で送信される船舶識別信号(AISデータ)を受信してその船舶の船舶位置を求め、時間経過に伴う船舶の位置や状態の変化に基づいて、AISデータの受信タイミングとは別のタイミングで船舶の位置を推測し、船舶位置と推測位置とを互いに異なった色・濃度または形態で表示する。
(もっと読む)
非放射性誘電体線路ならびにそれを用いた高周波送受信器、レーダ装置、レーダ装置搭載車両およびレーダ装置搭載小型船舶

【課題】 実用的であって簡単かつ緻密に特性インピーダンスを調整することができる非放射性誘電体線路を提供すること。
【解決手段】 高周波信号の波長の2分の1以下の間隔で平行に配置された平板導体1,2間に高周波信号を伝搬させる誘電体線路3が配置されており、平板導体1,2の少なくとも一方の内面に誘電体線路3の一部に対向する凹部4が形成されている非放射性誘電体線路である。誘電体線路3を伝播する電磁波が凹部4へと漏れ出し、凹部4がスタブのように定在波を形成するような働きをするため、凹部4の底部4bまでの深さを変えることにより、入力端3aから出力端3b側を見た反射係数を連続的に変化させることができるので、凹部4の深さを変えるだけで簡単に、非放射性誘電体線路の特性インピーダンスを所望の条件に合うように連続的に変化させることができる。
(もっと読む)
物標検出装置
【課題】 割り込み物標を高速に検知することが可能な物標検出装置を提供することを目的とする。
【解決手段】 この物標検出装置は、遠距離狭角検出範囲R1を有する第1レーダ100aと、遠距離狭角検出範囲R1に部分的に重複する近距離広角検出範囲R2を有する第2レーダ100bとを備えている。範囲設定手段としてのレーダ100aは、近距離広角検出範囲R2であって且つ遠距離狭角検出範囲R1でない非重複検出範囲R2a内において、第2レーダ100bの出力のノイズレベルが上昇した場合には、このノイズレベル上昇した検出範囲R2aに隣接する遠距離狭角検出範囲R1内の領域Rxを重点的検出範囲に設定して物標検出を行う。
(もっと読む)
自動車自身の速度を測定する装置
プリクラッシュセンサシステムを用いて自動車自身の速度を求める、自動車自身の速度の測定装置を提案する。測定は、道路表面で反射される信号に基づき行われる。当該測定は、車輪のロック状態または空転状態または浮遊状態のような所定の動作状態が生じている場合にのみ行われる。 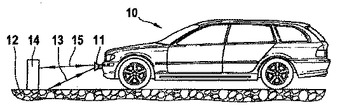 (もっと読む)
(もっと読む)
物体の検出方法、障害物検出方法及び障害物検出装置
【課題】より短時間で一定範囲内の物体を検出できるようにすることである。
【解決手段】筐体21を所定角度範囲回転させて、遠距離用アンテナ11a、中距離用アンテナ11b、短距離用アンテナ11cから同時に電波を放射し、それぞれの反射波を受信して一定範囲内の物体を検出する(図3,S11)。処理装置13は、遠距離用アンテナ11a、中距離用アンテナ11b、短距離用アンテナ11cの反射波から得られるそれぞれの検出データをマージして一定範囲内にある物体の検出データを得る(S13)。さらに、その検出データから障害物を抽出する(S14)。
(もっと読む)
FMCWレ―ダ装置及び記録媒体
【課題】 移動物と静止物を正確に認識できるFMCWレーダ装置及び記録媒体を提供すること。
【解決手段】 ステッフ゜200では、周波数シフト量の幅を決定する。ステッフ゜210では、周波数シフトを行う。ステッフ゜220では、評価値|Vp|を算出する。ステッフ゜230では、近傍和Sum2を算出する。ステッフ゜240では、スペクトル全体和Sum1を算出する。ステッフ゜270では、全てのスペクトル全体和Sum1の値を比較して、真の周波数シフト量TSnを決定する。ステッフ゜280では、真の周波数シフト量にて周波数シフトしたスペクトルに関し、スペクトルピークの近傍和Sum2が閾値Thp以下か否かを判定する。ステッフ゜290では、移動物予測フラグがセットされているか否かを判定する。ステッフ゜300では、近傍和Sum2が閾値Thp以下で且つ移動物予測フラグがセットされていないので、そのスペクトルピークは静止物のスペクトルピークであると判断する。
(もっと読む)
81 - 86 / 86
[ Back to top ]