
Fターム[5J070BF13]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 衝突回避 (511) | 表示 (44)
Fターム[5J070BF13]の下位に属するFターム
ベクトル表示 (2)
Fターム[5J070BF13]に分類される特許
1 - 20 / 42
航行援助装置
【目的】
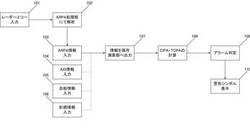
本発明は、船舶で航行中に危険物標や他船舶が自船予想針路上に出現または横断する可能性が発生した場合、ARPA(自動衝突予防援助装置)やAIS(自動船舶識別装置)などの装置を通じてレーダより得た危険物標の情報や他船の位置・針路ベクトルなどの情報を取り込み、予想針路との最接近距離と到達時間であるCPA・TCPAを計算し危険シンボルを表示する方法及び装置に関し、予想された針路が安全かどうかを知らせることを目的とする。
【構成】レーダ空中線部より得られた探知物標画像、及び自船情報と他船情報と予想針路情報を用いて演算部にて各予想針路位置におけるCPA・TCPAの演算を行ない、前記演算の結果からアラーム判定を行ない判定の結果に応じた危険シンボルを表示部へ画面表示させる。
(もっと読む)
移動体検知システム及び移動体検知表示装置

【課題】車両等の移動体を検知する移動体検知システムにおいて、移動体に適切な移動方向を指示する。
【解決手段】車両等の移動体を検知する移動体検知システムにおいて、移動体検知手段(例えば、ミリ波レーダ装置)が検知範囲に存在する移動体を検知し、進行方向決定手段が前記移動体検知手段により検知された移動体に対して表示する進行方向を決定し、表示手段が前記移動体検知手段により検知された移動体に対して前記進行方向決定手段により決定された進行方向の情報(例えば、移動体を誘導するための矢印の情報)を表示する。
(もっと読む)
自動車の安全装置および自動車
【課題】通行人や二輪車が、側後方の安全確認がなされずに開けられてしまった自動車の側部ドアと衝突する事故を未然に防止するとともに使い勝手のよい安全装置を提供すること。
【解決手段】自動車が停車中で側部ドアが閉状態であり、自動車の側後方の物体が自動車に到達するまでの到達予想時間が予め定められた所定の値以下の場合に音または表示により注意喚起を行う注意喚起モードと、注意喚起モード中に、すべての側部ドアが閉じられており、すべての側部ドアそれぞれのドアロックスイッチがロック側にある場合に移行するモードであって、物体側の側部ドアのドアロックスイッチがロック解除側へ操作されると操作されたドアロックスイッチをロック側へ戻す制御を行うドアロック制御モードとを有することを特徴とする自動車の安全装置などにより、この課題を解決する。
(もっと読む)
画像処理装置、これを搭載したレーダ装置、画像処理方法及び画像処理プログラム
【課題】画像処理装置において、物標の接近を検出する簡素な構成を実現するとともに、接近物標が存在することをオペレータが直感的に把握できるように画像処理を行う構成を実現する。
【解決手段】レーダ装置5に搭載される画像処理装置10は、相対航跡用画像メモリ32と、相対航跡判定処理部33と、を備える。相対航跡用画像メモリ32は、当該レーダ装置5に対する物標の相対的な位置変化を示す相対航跡データ群として記憶可能に構成される。相対航跡判定処理部33は、相対航跡用画像メモリ32に記憶される相対航跡データ群のうち、同じスイープライン上に存在する画素の相対航跡データに基づいて、自船(レーダ装置5)に接近する接近物標を検出する。
(もっと読む)
レーダ装置
【課題】衝突危険度の高い物標を確実かつリアルタイムに把握することができるレーダ装置を提供する。
【解決手段】レーダ装置は、レーダアンテナ1と、表示器8と、速度推定部22と、データ発生部6と、を備える。レーダアンテナ1は、水平面内で回転しながらパルス状の信号の送受信を繰り返す。表示器8は、自装置周囲の物標の位置を示すレーダ映像を表示する。速度推定部22は、自装置からの電波の放射方向成分における自装置と物標との相対速度を推定する。データ発生部6は、速度推定部22が推定した前記物標の相対速度に基づいて当該物標の危険度を求める。また、速度推定部22は、レーダアンテナ1が今回受信したエコーと、当該レーダアンテナ1が直前に受信したエコーと、の間の位相変化に基づいて前記相対速度を検出する。そして、表示器8は、前記レーダ映像を表示する際に、危険度が高い物標と低い物標とで表示方法を異ならせることが可能である。
(もっと読む)
車両制御装置
【課題】車両の安全を十分に確保することができる車両制御装置を提供すること。
【解決手段】本発明による車両制御装置1は、車両の前方の障害物との距離を検出する第一検出手段と、車両の右折又は左折の開始及び終了を検出する右左折検出手段5aと、車両の前方の所定領域を設定する所定領域設定手段5bと、右左折検出手段5aが車両の右折又は左折の開始を検出した場合に、第一検出手段が所定領域に指向するように、第一検出手段の車両の車体の前方に対する第一角度θ1を制御する第一角度制御手段5cとを含むことを特徴とする。
(もっと読む)
検出装置
【課題】レーダによる物体検知範囲を広角範囲、または狭角範囲を切り替えて使用できるようにする。
【解決手段】アンテナ37−1は、電波を照射して送信信号を送信し、第1の間隔で1列ずつのアンテナが配置されたアンテナ51−2,51−3の対は、送信信号のうち、反射されてくる電波を受信し、第1の間隔よりも広い第2の間隔で、アンテナ51−1,51−2を1本のアンテナとし、アンテナ51−3,51−4を1本のアンテナとしたときのそれらの対は、送信信号のうち、反射されてくる電波を受信し、受信部12は、アンテナ51−2,51−3の対、または、アンテナ51−1,51−2とアンテナ51−3,51−4とをそれぞれ1本のアンテナとした対により受信された電波より受信信号を生成し、衝突予備動作用信号処理部13は、受信信号をサンプリングすることにより、物体を検出する。本発明は、車両安全装置に適用することができる。
(もっと読む)
障害物検出装置
【課題】車両周辺の障害物の位置・形状及びスペースを広範囲かつ正確に検出すること。
【解決手段】アレイ状に配置された素子から送信波を送信し、障害物での反射波を各素子で受信する。その受信信号を受信した時間から障害物の距離を算出し、各素子の受信信号の位相差から障害物の方向を算出する。また、広範囲で障害物を検出するために、各素子に入力する送信信号の位相差を適宜変えて、送信波の合成指向性を制御するとともに、各素子の受信信号に乗算する係数を適宜変えて、受信波の合成指向性を制御する。特に、隣接素子間に位相差を同相、逆相交互に設定することで、指向性を狭角、広角と交互に切り替え、広範囲の障害物の位置検出を可能とする。さらに、移動しながら検出した位置情報から、車両走行経路周辺の障害物の位置・形状及びスペースの認識を可能とする。
(もっと読む)
車載表示装置
【課題】ヘッドライトの点灯が必要な走行時に、安全かつ快適に車間距離の確保を運転者に促すことが可能な車載表示装置を提供する。
【解決手段】車載表示装置1では、制御部10が、各センサ及びスイッチ類2〜6からの入力情報に基づいて各種処理を実行し、ピクセルライト7を介して、自車両に対する前方側の路面上に照明光を照射し、画像デバイス8を介して、ピクセルライト7の投射領域に、安全車間距離を表す指標画像を表示する。このため、安全車間距離を表す指標画像が車両前方の道路(実像)上に表示されるため、運転者の視線が車外前方から外れずに済むと共に、運転者の焦点が実像上の指標画像に合いやすくなり、例えば夜間や夕方におけるヘッドライト6の点灯が必要な走行時に、安全かつ快適に車間距離の確保を運転者に促すことができる。
(もっと読む)
対象物検出装置及び対象物検出システム
【課題】ミリ波レーダで対象物を検出するに際し、ミリ波の反射波が微弱である人物を、車両又は道路上の他の物体と区別して有効に検出することができる対象物検出装置、及び対象物検出システムを提供する。
【解決手段】ミリ波レーダから、対象物候補の方向(A,B,C)、距離及び反射波強度を取得し、遠赤外線カメラから、画像データを取得して人物候補領域の方向(D,E)を特定し、人物候補領域にて特定した人物候補への方向(E)に反射波強度が所定値よりも低い対象物候補が有るか否かを判断し、対象物候補が有る(Bの方向の対象物候補)と判断した場合、当該対象物候補を人物候補として検出する。
(もっと読む)
信号処理装置、及びレーダ装置。
【課題】 電子スキャン方式のレーダ装置においてアンテナ間隔をある程度離間させた状態であっても、方位角検出範囲を広角化する。
【解決手段】 目標物体に反射された送信信号を複数のアンテナで受信して前記アンテナごとのビート信号を生成するレーダ送受信機の信号処理装置は、前記ビート信号を合成して合成ビート信号を生成する合成手段と、前記ビート信号のいずれかと前記合成ビート信号に基づいて前記目標物体の方位角を検出する方位角検出手段とを有するので、アンテナ対の間に仮想アンテナを配置した場合にこの仮想アンテナにより得られるビート信号と同じ位相の合成ビート信号を得ることができ、ビート信号と合成ビート信号とに基づき方位角を検出することで、アンテナ間隔をある程度離間させたままで位相折り返しが発生しない方位角検出範囲を広角化できる。
(もっと読む)
測距システム
【課題】極至近距離の測距を可能にする新規な測距手法を提供する。
【解決手段】判定部3は、パルスレーダ1によって生成された受信波形を時間軸上において複数の区間に分割し、分割された区間のそれぞれにおける受信波形の積分値の大小関係に基づいて、受信波形の位相パターンを判定する。測距部4は、ターゲットの既知の距離において出現する位相パターンを特定するとともに、この位相パターンの繰り返しに基づいて、既知の距離からの変化量を算出し、これによって、ターゲットの現在の距離を算出する。
(もっと読む)
車両用警報装置
【課題】 従来よりも適切に安全運転を支援することのできる車両用警報装置を提供すること
【解決手段】 自車両の前方物との距離を検出する車間距離測定器22と、自車両の速度を検出する速度検出手段と、マイクロ波を検出するマイクロ波受信器4を備え、警報手段は、マイクロ波受信器によって所定のマイクロ波が検出された場合にマイクロ波検出警報を報知するマイクロ波警報報知機能と、車間距離測定器で検出された自車両の前方物との距離と速度検出手段によって検出した自車両の速度とに基づき車間警報を報知する車間警報報知機能とを有する。そしてマイクロ波警報報知機能による報知と車間警報報知機能による報知を異なる態様で行うようにした。
(もっと読む)
車両周辺監視装置
【課題】視差オフセット量を算出するに際に基準とする対象物を移動する対象物として高精度に視差オフセット量を算出することができる車両周辺監視装置を提供する。
【解決手段】本発明の車両周辺監視装置によれば、2つの撮像装置の光軸間平行度ずれに起因する視差オフセット量が算出される。レーダ装置により距離が検出される一の照射領域に対象物が1つのみ存在し、かつ、一の照射領域に対応する撮像画像における一の局所画像領域に、抽出された対象物が1つのみ存在するという所定条件を満たす場合に、レーダ装置により対象物までの距離が検出されるとともに、2つの撮像装置により得られた対象物の視差が算出される。前記のことより、視差オフセット量を高精度に算出することができる。
(もっと読む)
信号処理装置、レーダ装置、及び、車両制御システム。
【課題】 機械走査方式のレーダ装置において1チャネルの角度信号からでもアンテナの回動方向を検出する。
【解決手段】 アンテナ角度検出手段は、仮決めした回動方向におけるアンテナ角度を検出し、静止物の方位角度の変位方向が前記車両の旋回方向と反対方向であるときには前記仮決めされた回動方向を正しいと判定し、前記変位方向が前記車両の旋回方向と同じ方向であるときには前記仮決めされた回動方向を誤りと判定することでアンテナの回動方向を確定するので、1チャネルの角度信号からでもアンテナの回動方向を検出できる。
(もっと読む)
衝突予測装置
【課題】 物体との衝突部位の予測精度を向上させることができる衝突予測装置を提供する。
【解決手段】 衝突予測装置は、自車両周辺の障害物を検出すると共に、自車両が走行する道路のカーブ半径を推定し、その推定カーブ半径の微分値を算出する。そして、衝突予測装置は、推定カーブ半径の微分値をR補正係数で補正して推定カーブ半径微分係数を算出し、その推定カーブ半径微分係数を用いて、自車両の部位区間毎に蓄積された衝突確率の積算値を補正する。そして、衝突予測装置は、自車両における障害物との衝突部位を予測し、上記の推定カーブ半径微分係数を用いて、衝突確率の積算上げ幅を設定する。そして、衝突予測装置は、該当する衝突部位における衝突確率の積算値に対して今回の衝突確率を積算上げ幅の分だけ加算し、衝突部位毎の衝突確率の積算値に基づいて、自車両のある部位区間に障害物が衝突するかどうかを判定する。
(もっと読む)
レーダ監視装置
【課題】レーダ装置による設備への悪影響の発生を抑制する「レーダ監視装置」を提供する。
【解決手段】予めレーダ波の悪影響を受ける設備の周辺に設定したレーダ禁止エリア内に、自動車が進入したならば、レーダ波の射出を停止し、音声出力装置7を介してスピーカ8に「レーダ監視を停止しました。」といった音声案内を出力する。また、レーダ禁止エリア内に、自動車が位置する期間中、レーダの停止中を表現したアイコン312を表示すると共に、地図画像300上に、レーダ禁止エリアが設定されている施設を表すマーク321と、レーダ禁止エリアの範囲322とを表示する(b)。
(もっと読む)
車両用外界認識装置、および、車両システム
【課題】複数の物体が互いに近接している場合でも、これらの物体を高精度で個体認識すること。
【解決手段】車両用外界認識装置100の衝突判定部4は、物体群の左端位置、中心位置、右端位置それぞれについて、両端横速度計算部3で計算される各位置における各横速度をもとに、相対座標系における物体群の移動軌跡を計算し、その移動軌跡が相対座標系における原点に近づくほど各位置における危険度が高いものとして、各位置における危険度を計算し、衝突回避制御部5は、衝突判定部4により計算される物体群の各位置における危険度のうち、少なくとも1つの位置における危険度が所定しきい値を超えるときに、その危険度に対応する物体群に関する衝突回避制御を実行する。
(もっと読む)
測距システムおよび測距方法。
【課題】故障の自己診断を行い、システムとしての信頼性を高める。
【解決手段】パルスレーダ1は、外部へ送信パルスを送信し、ターゲットで反射された送信パルスを受信波形として受信する。判定部2は、パルスレーダ1が故障していない状態で受信した正常波形と、パルスレーダ1が故障している状態で受信した異常波形との相違に基づいて予め設定された評価演算を用いて、パルスレーダ1が受信した受信波形の評価値を実波形空間上で算出する。そして、判定部2は、算出された評価値と、予め設定されたしきい値とを比較することでフェール判定を行う。
(もっと読む)
車両用走行安全装置
【課題】複数のレーダ装置を設けた場合に生じる不検知領域に物体が存在すると予測される場合に、接触回避効果を高める。
【解決手段】送受信手段が複数備えられており、回避支援手段は、自車前方の領域であって一の送受信部の検知領域および他の送受信部の検知領域間の不検知領域に外挿部により外挿された制御対象物体が存在する場合には(ステップS14:Yes)、不検知領域以外に外挿部により外挿された制御対象物体が存在する場合の作動内容(ステップS8)よりも、接触回避効果の高い作動内容(ステップS11)を設定する。
(もっと読む)
1 - 20 / 42
[ Back to top ]