
Fターム[5J070BF11]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 衝突回避 (511)
Fターム[5J070BF11]の下位に属するFターム
警報 (149)
表示 (44)
避航操作(船舶等) (7)
自動制御(自動車等) (225)
Fターム[5J070BF11]に分類される特許
61 - 80 / 86
測定装置および方法
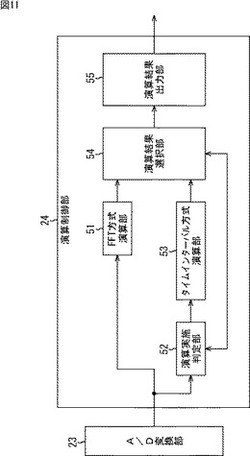
【課題】近距離対象物の距離測定の精度を維持しつつ高速応答を図る。
【解決手段】演算実施判定部52は、A/D変換部23から提供される2周波のドップラ信号の信号強度や、演算結果選択部54から通知される過去の算出距離等に基づいて、対象物が所定範囲内に存在するか否かを判定する。対象物が所定範囲外の場合、FFT方式演算部51による算出距離が、演算結果選択部54を介して演算結果出力部55から出力される。対象物が所定範囲内の場合、タイムインターバル方式演算部53による算出距離と、FFT方式演算部51による算出距離とのうちの、演算結果選択部54により選択された方が、演算結果出力部55から出力される。本発明は、プリクラッシュシステム等の高応答システムに適用可能である。
(もっと読む)
車載用レーダ装置

【課題】受信電磁波の周波数スペクトルに基づいて電磁波送信方向のオブジェクト長を算出可能な車載用レーダ装置を得る。
【解決手段】周波数変調された送信電磁波A1を送信する送信手段101と、オブジェクト10で反射された受信電磁波A2を受信する受信手段102と、送受信電磁波に基づいくビート信号Bをフーリエ変換するフーリエ変換手段104と、フーリエ変換による周波数スペクトルfnから自車両100とオブジェクト10との相対位置および相対速度を測定する相対位置・相対速度算出手段105と、周波数スペクトルfnのうち、オブジェクト10に対応する周波数スペクトルに基づいて電磁波送信方向のオブジェクト長Lobjを算出するオブジェクト長算出手段106とを備えている。
(もっと読む)
被服または帽子
【課題】車両検知器が通行人を検知しやすくなる被服または帽子を提供すること。
【解決手段】被服1の両肩部生地11は例えばアルミ等の金属粉を含む合成繊維によってできている。これにより、車両検知器3から送信されるミリ波は被服1の両肩部生地11に含まれる金属粉によって反射される。その結果として、車両検知器3は、被服11の両肩部生地11に含まれる金属粉によって反射した反射波に基づいて通行人を検知しやすくなる。
(もっと読む)
レーダ追跡装置及びその方法
追跡の測定値を極座標系から直交座標系に変換することによって発生するレーダ測定値の測定誤差共分散の変化を基に、α−β追跡フィルタのα及びβフィルタ利得を求めるための追跡指数を計算する追跡指数部、及び追跡指数変化率に対するα及びβフィルタ利得の変化率の偏微分係数と追跡指数変化量とを基に、α及びβフィルタ利得の変化量を計算し、α及びβフィルタ利得を更新するフィルタ利得更新部を具備するα−β追跡フィルタを有するレーダ追跡装置である。 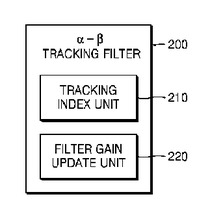 (もっと読む)
(もっと読む)
物体検出手段の試験装置、及び試験車両
【課題】物体検出手段の試験コストを低く抑えつつ、試験精度を向上させることが可能な物体検出手段の試験装置、及び試験車両を提供する。
【解決手段】試験装置10は、物体検出手段20,22を取り付ける取付部12と、物体60を検出する検出位置である第1位置と物体60との衝突を回避する第2位置との間で、取付部12を位置切換可能に支持する支持部14と、支持部14を駆動して第1位置と第2位置との間で取付部12の位置を切り換える駆動部16と、を備える。この試験装置10が車両40の荷台42に搭載され、試験車両100が構成される。
(もっと読む)
立体物認識装置
【課題】周辺状況を検出するセンサの特性、制御装置による車両安定化の影響度、走行環境等の不確定要因に対して、立体物の認識結果に基づく制御を適切なタイミングで実行可能とする。
【解決手段】ステレオカメラ2の撮像画像に基づく画像立体物の存在確率を画像立体物存在確率算出部11で算出し、ミリ波レーダ3の出力に基づくミリ波立体物の存在確率をミリ波立体物存在確率算出部12で算出し、レーザレーダ4の出力に基づくレーザ立体物の存在確率をレーザ立体物存在確率算出部13で算出する。そして、存在確率補正部14で、画像立体物、ミリ波立体物、レーザ立体物のそれぞれの存在確率を、各認識センサの認識率に基づいて補正し、総合存在確率設定部15で、補正後の存在確率をフュージョンして総合存在確率を設定することで、障害物への接触回避や警報等の制御を確実且つ最適なタイミングで実行可能とする。
(もっと読む)
車両の衝突回避制御装置
【課題】モデル予測制御により、衝突を回避できる最適なルートを走行するためのアクチュエータの最適操作量を得る。
【解決手段】衝突回避制御装置は、自車の走行状態に関するデータとターゲットと自車間の距離およびターゲットの相対速度に関するデータとを記憶するデータベース部(6)と、データベース部(6)に記憶されたデータに基づいてターゲットの未来位置を予測するターゲット未来予測部(2)と、データベース部(6)に記憶されたデータに基づいて自車の未来位置を予測する自車未来予測部(3)と、ターゲットおよび自車の未来予測部出力に基づいて衝突の危険度を評価する衝突危険度評価部(4)と、衝突危険度評価部出力に基づいてモデル予測制御を行い、衝突回避のための自車のアクチュエータに関する最適操作量を検索する最適操作量検索部(5)を備える。
(もっと読む)
レーダ装置
【課題】近接する複数の低反射物体、高反射物体の速度差が大きい場合であっても、それぞれの正確な距離を測定することができるレーダ装置を提供する。
【解決手段】CPU18は、可変利得アンプ16のゲインを最大に設定してレーザ投光を指示し、受光強度をメモリ19に格納する。その後、可変利得アンプ16のゲインを低ゲインに設定してレーザ投光を指示し、受光強度をメモリ19に格納する。低ゲイン時の受光強度に最大ゲインと低ゲインの割合にあたる値を乗算し、この乗算値と最大ゲイン時の受光強度とを比較して、最大値を合成受光強度として採用する。
(もっと読む)
電波式距離センサ
【課題】温度依存性が低く、近距離の対象物であっても良好に距離を検出することのできる電波式距離センサを提供する。
【解決手段】検出距離に応じた周期的な基準信号faを生成するパルス生成手段1と、基準信号faを振幅偏移変調して変調信号F、Faを送信する送信手段2と、対象物10によって反射した変調信号F、Fbを受信してパルス状の受信信号fbに復調する受信手段3と、基準信号faと復調された受信信号fbとに基づいて対象物10との距離を検出する距離検出手段5とを備える電波式距離センサであって、復調された基準信号faと受信信号fbとの排他的論理和をとることにより、位相差パルスfcを生成する位相差検出手段4と、位相差パルスfcに基づいて対象物10との距離を検出する距離検出手段5とを備える。
(もっと読む)
レーダー装置
【課題】
検出範囲の端部において迅速に物体を検出することが可能なレーダー装置を提供する。
【解決手段】
本発明は、所定の角度範囲に送信波を送信し、対象物に反射される反射波を受信するレーダーセンサと、受信した反射波の角度に対する強度分布から、強度のピークを求め、ピークに基づいて対象物の方向を決定する処理部とを有するレーダー装置を提供する。 処理部は、角度範囲の端部において反射波を検出し、かつ、ピークを検出しない場合、検出した反射波の強度分布から、対象物が端部の方向に存在しているかの判定を行うことを特徴とする。
(もっと読む)
レーダー装置
【課題】
一つの反射対象である物体に引き起こされた複数の反射波から、一つの反射対象である物体を検出することが可能なレーダー装置を提供する。
【解決手段】
本発明は、所定の範囲に送信波を送信し、対象物によって反射される反射波を受信するレーダーセンサと、受信した反射波の強度分布のピーク位置に基づいて、対象物の位置を決定する処理部とを有するレーダー装置を提供する。処理部は、複数のピーク位置を検出した場合、検出した複数のピーク位置を、各ピーク位置と以前に検出した対象物の位置との差に基づいた重みで加重平均をとることにより、対象物の真の位置を求めることを特徴とするレーダー装置。
(もっと読む)
電波送受信器における電波干渉回避装置
【課題】 演算部を含む電波送受信器における電波干渉回避装置であって、発振周期の乱れによる影響を該演算部に極力を与えないようにして、干渉波の発振タイミングに対して自己の発振タイミングをずらし、干渉を回避する。
【解決手段】 干渉波による干渉の発生を検出する手段10によってその干渉を検出したときのみ、一周期の長さを変更し、自己の発振タイミングを干渉波の発振タイミングに対して相対的にずらすタイミング制御手段20を備える。
(もっと読む)
チャープレーダ装置
【課題】 本発明は、多くの車両から同時にチャープ波形のレーダ電波が発射されるような状況で目標物の誤検出を防止できるチャープレーダ装置を提供することを目的とする。
【解決手段】 チャープ波形のレーダ電波を発射し目標物で反射された電波を受信して前記目標物を検出するチャープレーダ装置において、チャープ波形を出力するチャープ波形成形手段10と、装置固有のコードデータのデジタル波形を出力するデジタル波形成形手段20,80と、前記チャープ波形を前記デジタル波形で変調した合成波を出力する合成波成形手段30を有し、前記合成波成形手段の出力する合成波の電波を発射する。
(もっと読む)
車載レーダ装置
【課題】消失した物標の位置を適正に補完できる「車載レーダ装置」を提供する。
【解決手段】物標検出部2は、T1、T2、T3においてレーダ計測信号処理部13によって検出されていた物標Aが、T4において検出されなくなった場合、T4において自車が停車中であれば、最後の物標Aを検出したT3において物標Aが停車中であり、T3以前において物標Aが所定頻度で検出されていたかどうかを調べる。そして、T3において物標Aが停車中であり、T3以前において物標Aが所定頻度で検出されていた場合、自車が発車するか物標Aは発射して物標Aが再検出される(T8)までの間(T4、T5、T6、T7)、T3において最後に物標Aを検出した位置に、物標Aの位置を補完する。
(もっと読む)
レーダ装置
【課題】様々な走行状況において障害物を効果的に検出する。
【解決手段】発振器10は、FM−CWモードとCWモードの両方で発振信号を出力し、スイッチ14は広角送信アンテナ16a、狭角送信アンテナ16bを切り換えて電波を送信する。送信波は障害物に当たって反射され、受信アンテナで受信される。受信アンテナ20で得られる受信信号をミキサ22で送信波と混合し、得られた差信号をフィルタ24でフィルタリングしてビート信号を得る。ビート信号に基づき、信号処理回路26が障害物の距離、速度を検出する。そして、制御回路30は、2種類のモード、2種類の送信アンテナ16a、16bを適応的に切り換えて、各種状況で効果的な障害物の検出を行う。
(もっと読む)
運転支援装置
【課題】 車両にレーダ装置を設置し、自車に接近する危険度の高いターゲットを見失うことなく追尾して警報し、確実にドライバーをサポートする運転支援装置を提供する。
【解決手段】 水平方向に回転する折りたたみ機構を有するドアミラーケース31L,31Rの内部にレーダ1LD,1RDを設置し、ドアミラーケース31L,31Rの折りたたみ機構を利用して回転させる。これにより、危険度の高いターゲット6をできるだけ長い時間観測し、ドライバーに警報・表示を行う。また、レーダの検出結果から、前方には、自車15が通り抜ける幅がないと判断した場合には、車両後方を視野とする撮像装置を起動し、ドライバーに対して後方の映像を表示して、後退時の後方認知の支援を行う。
(もっと読む)
ガードビームを有する車輌レーダーシステム
第一のアンテナ(22)及びガードアンテナ(24)を備えた車輌(16)中の予測衝突レーダーシステム(10)であって、放射パターン(44、46)がオーバーラップしており、ガードアンテナ(24)の放射パターン(44)は第一のアンテナ(22)の放射パターンよりも広い。第一のアンテナ及びガードアンテナからの信号の比較(718,120)が車輌(16)の脅威となりそうでない標的の除外を提供する。第一のアンテナ(22)の第一の実施例はマルチビームアンテナ(22.1、22.2)であって、電磁レンズ(40、56)が例えば誘電体(40、40.1)または平面(56)であって、前方放射エレメント(58)からの信号が、それらと整列したガードアンテナ(24)からの信号と比較される。他の実施例では、電磁レンズ(70)は、ガードアンテナ(24)と協働して放射パターン(44.1’)の方向を変化させる。  (もっと読む)
(もっと読む)
物標検知装置及び物標検知システム
【課題】 従来の車両検知装置より小型で破損から保護することができる物標検知装置を提供する。
また、物標の有無だけでなく、その方向も検知できる物標検知システムを提供する。
【解決手段】 マイクロ波発振器1で発生するマイクロ波信号1aを第1及び第2の基準信号u1,u2と第3の送信信号4aとに分け、第3の送信信号4aを物標6に対して照射し、物標6で反射された第1及び第2の受信信号w1,w2と第1及び第2の基準信号u1,u2を第1及び第2の検波器81,82に入力して第1及び第2の検波信号8a,8bを得る。そして、第1及び第2のA/D変換器で検波信号8a,8bをA/D変換して得られた検波データx,yを演算処理して物標6の有無を判定する。また、物標検知装置2台を使用して、それぞれの物標検知装置から出力される信号ベクトルの位相差の正負により物標6の方向を判定する。
(もっと読む)
障害物検出装置
【課題】路面反射板や路面上方構造物を障害物として判断しない障害物検出装置を提供すること。
【解決手段】先行車両検出装置13において、上方照射波30と下方照射波31とは一部重なり合いを生じるように照射波を照射して、上方照射波30と下方照射波31とのそれぞれの反射波強度から照射波が反射した物体の種類を判定するようにした。
(もっと読む)
アンビギティー検知式周波数偏位変調
距離範囲検知装置は、マイクロ波信号を送信するようになされた送信機(4)、及び目標から反射した、送信信号の一部に対応するエコー信号を受信する受信機(4)と、前記送信信号を発生するために前記送信機(4)に供給される駆動信号を発生する信号発生手段(2)であって、信号発生手段の発生する駆動信号には、少なくとも2つの周波数を含む第1の信号フレーム(300a)と少なくとも2つの周波数を含む第2の信号フレーム(301a)が含まれており、前記第2の信号フレーム(301a)は前記第1の信号フレーム(300a)と異なる信号発生手段(2)と、前記送信信号と共に前記エコー信号を処理して前記エコー信号を発生した目標までの距離を決定するプロセッサ(11)を備える。本装置は、自動車の、代表的には車間距離制御(ACC)機能における周波数偏位変調(FSK)レーダーに特に適している。本装置は距離測定のアンビギティーを低減可能である。アンビギティーを低減する対応方法も開示される。 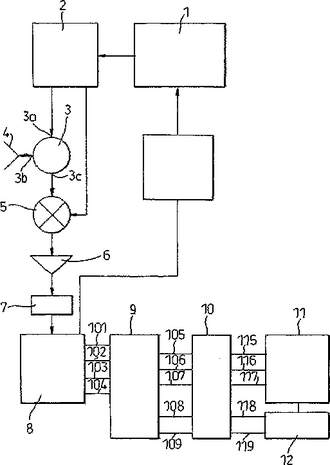 (もっと読む)
(もっと読む)
61 - 80 / 86
[ Back to top ]