
Fターム[5J070BF11]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 衝突回避 (511)
Fターム[5J070BF11]の下位に属するFターム
警報 (149)
表示 (44)
避航操作(船舶等) (7)
自動制御(自動車等) (225)
Fターム[5J070BF11]に分類される特許
21 - 40 / 86
FM−CWレーダ装置および数値補正方法
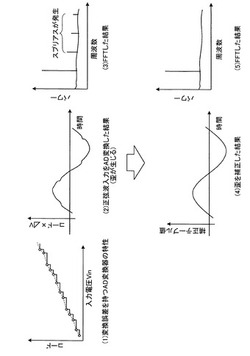
【課題】安価なAD変換器を用いて、スプリアスの少ないFM−CWレーダ装置を得る。
【解決手段】FM−CWレーダ装置が有するAD変換器に対して正確な試験用電圧を印加した際にAD変換器より出力されたコードと印加した電圧値とを対応付けたテーブルを記憶するADコード補正手段を設ける。そして、ADコード補正手段は、AD変換器より出力されたコードを取得し、取得されたコードと対応付けられた電圧値を出力する。FM−CWレーダ装置は、ADコード補正手段より出力された電圧値を用いて、目的物の相対速度および距離等を計測する。
(もっと読む)
車両用外界認識装置及びそれを用いた車両システム

【課題】安全性確保と処理負荷低減の両立を図ることができる車両用外界認識装置及び車両システムを提供する。
【解決手段】車両用外界認識装置100は、自車の予測進路と自車前方の検知物体の情報に基づいて自車が検知物体に衝突する危険度を演算する第1の衝突判定手段103と、検知物体が予測進路の外から予測進路内に進入するか否かを判定する第2の衝突判定手段104を有する。そして、複数の検知物体の中から、危険度が第1の閾値以上である検知物体と、予測進路内に進入すると判定された検知物体とを選択候補物体として選択し、その選択された複数の選択候補物体の中から、自車との相対距離が最小となる選択候補物体を歩行者判定要求物体として選択する物体選択手段105を有する。そして、その選択された歩行者判定要求物体に対して画像情報を用いて歩行者か否かを判定する歩行者判定手段106を有する。
(もっと読む)
車両用レーダ装置
【課題】車両の状態や車両周囲の環境状態を考慮し、測距性能の向上を図る。
【解決手段】測距部52は、受信波形とシステムが保有する基準波形との差分波形に基づいて測距を行う。その場合、旋回や加減速による車両の姿勢変化に伴ってアンテナ位置が変化したり、雨天時に電波の送受信状態が変化したときには、差分波形補正部53で路面の反射成分を除去して差分波形を補正し、測距部52は、この補正した差分波形を用いて測距を行うことで、測距性能の向上を図る。
(もっと読む)
パルスドップラレーダ装置
【課題】使用形態の変更を自動的に判定して使用条件を切り替えるパルスドップラレーダ装置を提供する。
【解決手段】判定・制御部110は、使用形態判定手段111と、パルス幅選択手段112と、帯域制限幅選択手段113とを有しており、使用形態判定手段111が自車両の所定の制御装置からギア状態の信号を入力して使用形態の判定を行っている。使用形態判定手段111の判定結果に基づいて、パルス幅選択手段112および帯域制限幅選択手段113がそれぞれ広帯域インパルス生成部120および帯域幅制限部150を制御している。
(もっと読む)
車両のためのFMCWレーダセンサ
本発明は、少なくとも1つのアンテナ素子(14)と、周波数変調された送信信号を上記アンテナ素子(14)に供給するための変調素子(22、24、30)と、を備え、上記送信信号の周波数は、周期的に周波数帯域を超える、車両のためのFMCWレーダセンサにおいて、上記アンテナ素子(14)は、縦方向の間隙内に配置され上記送信信号が順次供給される複数の下位素子(32)を有し、変調素子(30、22、24)は、周波数帯域の周波数位置を可変的に調整するように構成されることを特徴とする、FMCWレーダセンサに関する。 (もっと読む)
レーダ装置
【課題】小型化や車両部品形状の制約の条件を満足しながら外部からのノイズの影響を受けにくくするとともに水滴がレーダ内部に侵入しにくくなるレーダ装置を提供する。
【解決手段】内壁29がアンテナユニット1の収容時の平面アンテナ14の位置及び平面アンテナ14の最大回動角θに対応した位置にあるので、矢印Aで示すような外部からのノイズの影響を受けにくくするとともに、雨等の水滴がレーダ装置の内部に侵入しにくくなる。なお、内壁29の高さHは、Cで示すような電波の送受信に影響のない高さとなる。また、外壁28がアンテナユニット1の収容時の平面アンテナ14の位置より低い位置にあるので、小型化や車両部品形状の制約の条件を満足する。
(もっと読む)
車載用レーダシステム
【課題】
従来技術によれば、リアルタイムでターゲット検知情報の信頼性判断をすることができない、という課題がある。
【解決手段】
当該車載用レーダシステムは、第1の電波を送信する送信手段と、第1の電波がターゲットから反射される第2の電波を受信し受信信号を得る受信手段と、受信信号に基づいて、前記ターゲットまでの距離,相対速度、及び角度を算出する算出手段と、ターゲットまでの距離,相対速度、及び角度を検出できる第一の領域と、ターゲットまでの距離、及び相対速度のみを検出できる第二の領域とを有する第一及び第二のレーダを備え、算出手段は、第一のレーダの有する第二の領域及び第二のレーダの有する第二の領域が重畳する第三の領域において、ターゲットまでの距離,相対速度、及び角度を算出する。
(もっと読む)
レーダ装置
【課題】車両前方の障害物の誤測定を低減するレーダ装置を提供する。
【解決手段】レーダにより測定された障害物との相対速度及び距離に基づいて、障害物が対向車でないと判定すると(S1,S2)、相対速度及び距離に基づいて、障害物が停止してるか否かを判定する(S3)。障害物が停止してれば(S3 Yes)、レーダの測定結果に基づき障害物が車両進行方向に対し所定幅を有する仮想的な自車線内に所定時間存在し続けるか否かを判定する(S4〜S7)。そして、障害物が所定時間存在し続ければ(S7 Yes)、又は、障害物が停止してなければ(S3 No)、測定された距離が自車線内に存在する各障害物までの距離のうち最も短いか否かを判定し(S8)、最も短ければ、測定された距離並びに相対速度を出力する(S9)。
(もっと読む)
レーダ判定装置、レーダ保全装置
【課題】レーダに付着した汚れの有無の誤判定を低減する、レーダ判定装置等を提供する。
【解決手段】車両1は、レーダ101、ACC(車間距離制御)制御ECU2を備える。ACC制御ECU2内に、その内部のマイクロコンピュータの機能部として構成する判定部20を備える。判定部20は、レーダ検知処理21、条件判定処理22、レーダ汚れ判定処理23を実行する。レーダ検知処理21では、レーダ101が所定時間、障害物を検知できないことを判定基準としてその汚れの存在を推定する。条件判定処理22では、ACC制御ECU2に接続された各種センサ類/各種ECU等3の情報を入力して、水分条件、地域条件を判定する。レーダ汚れ判定処理23では、レーダ検知処理21で汚れの存在を推定した場合でも、水分条件、地域条件が成立しない場合には、異常と判定せず、レーダ検知処理21の時間のカウントをリセットする。
(もっと読む)
広帯域レーダ装置
【課題】レーダ装置に関し、特に、超広帯域の電波を送受信して移動物体等の目標の位置を高精度で検出する広帯域レーダ装置に関し、複数の受信波を合成して目標物体の距離や方位等を検出するレーダ装置において、送信及び受信アンテナ間の距離が小さく、目標物体が広帯域レーダ装置から距離が離れた場合でも、目標物体の方位精度を高めた小型かつ超広帯域レーダ装置を得る。
【解決手段】2つの受信アンテナ部で受信した2つの受信パルス信号が、サンプリング積分検波されて2つのデジタル信号に変換された後、移動物体を検出した2つの応答差分信号が得られる。2つの信号から、任意の距離離れた第1の仮想受信アンテナ部及び第2の仮想受信アンテナ部で受信する擬似応答差分信号が算出される。この信号を用いて移動目標の距離と方位を検出することで、目標物体の距離がある程度離れても、方位精度を高めることができる。
(もっと読む)
回路装置及びレーダ装置
【課題】不要輻射を効率良く抑制することが可能な回路装置及びレーダ装置を提供することを目的とする。
【解決手段】高周波送受信回路(141、151)が実装された基板(140、150)と、基板が載置されるシャーシ(160)と、高周波送受信回路を覆い且つシャーシと係合する弾性力を調節するための複数のスリット(130〜139)が設けられているカバー(120)を有することを特徴とする回路装置(100)及びその様な回路装置を含むレーダ装置(10)。
(もっと読む)
物体検出装置
【課題】複数の物体が近接している場合であっても各物体を精度良く検出することができる物体検出装置を提供する。
【解決手段】歩行者検出装置1は、レーザレーダ2、カメラ3、運転支援ECU4及び制動部5を備える。歩行者検出装置1は、第1の歩行者候補点群L1に対し、第1の歩行者候補点群L1の分布幅より小さい幅を有する第1の検出領域Tを設定し、第1の検出領域T内に位置する検出点P1〜P3を抽出することにより、歩行者M1の検出を行う。第1の検出領域T内に位置しない検出点P4〜P9は、第2、第3の歩行者候補点群L2,L3として順次抽出され、第1の歩行者候補点群L1と同様な処理が行われる。これにより、複数の歩行者が近接している場合であっても各歩行者を精度良く検出できる。
(もっと読む)
レーダ装置、及びターゲットの速度進行方向推定方法
【課題】特に、ターゲットの速度が遅いときに、精度の高いターゲットの速度、及び進行方向を推定できるレーダ装置を提供する。
【解決手段】ターゲットの速度、及び進行方向を推定して衝突予測を行うレーダ装置であって、所定の時間一定の周期でターゲットを捕捉するターゲット捕捉部と、ターゲット捕捉部が捕捉した捕捉点に基づいて、ターゲットの速度、及び進行方向を推定して衝突を予測する衝突予測部と、衝突予測部の推定したターゲットの速度が所定速度以下である場合、推定したターゲットの速度に応じてターゲットを捕捉する時間を増加させて捕捉点の数を増加させるターゲット捕捉制御部とを備え、衝突予測部は、前記ターゲット捕捉制御部が捕捉点の数を増加させた後の全ての捕捉点に基づいて、ターゲットの速度、及び進行方向を推定して衝突を予測する。
(もっと読む)
信号処理装置、及びレーダ装置。
【課題】 機械走査方式のレーダ装置においてアンテナが所期の反転位置からずれた位置で反転したときでも精度よく回動角度を検出する。
【解決手段】所定の角度範囲内で往復回動する回動部が単位角度回動するときに角度信号が入力される信号処理装置であって、前記角度信号の状態遷移に基づいて前記回動部の回動方向の反転を検出する反転検出手段と、前記反転を検出した後に入力される前記角度信号に基づき前記回動部の回動角度を検出する回動角度検出手段とを有し、前記回動角度検出手段は、前記反転検出手段により前記回動部の第1の反転が検出された後第2の反転が検出されるまでに入力された前記角度信号に基づき、前記第2の反転が検出された後に入力される角度信号に基づく回動角度を補正するので、所期の反転位置からの角度信号に基づく回動角度を検出できる。
(もっと読む)
レーダ装置、及びターゲットの速度進行方向推定方法
【課題】精度の高いターゲットの速度、及び進行方向推定ができるレーダ装置を提供する。
【解決手段】ターゲットの速度、及び進行方向を推定して衝突予測を行うレーダ装置であって、ターゲットを捕捉するターゲット捕捉部と、ターゲット捕捉部が捕捉した捕捉点の中からフィルタ処理を行うためのフィルタ初期値を設定するフィルタ初期値設定部と、フィルタ初期値設定部が設定したフィルタ初期値に基づいて、フィルタ処理を行い、ターゲットの速度、及び進行方向を推定して衝突を予測する衝突予測部とを備え、フィルタ初期値設定部は、前記衝突予測部が予測した衝突するまでの時間が所定時間以下であるときの前記ターゲット捕捉部が捕捉した捕捉点をフィルタ初期値として設定する。
(もっと読む)
レーダ装置
【課題】物標に関する情報の算出を精度良く行う。
【解決手段】レーダ装置は、送受信手段と、物標検出手段とを備える。送受信手段は、レーダ波を送信するとともに、物標により反射されたレーダ波を逐次受信する。物標検出手段は、送受信手段が受信した受信信号のスペクトルにおけるピークに基づいて物標を検出し、当該ピークから物標を検出できない場合に物標を外挿状態と判断する。また、物標検出手段は、スペクトルにおけるピークの状態に基づいて外挿状態の種類を決定する。
(もっと読む)
FM−CWレーダ
【課題】検出性能を向上し、より高い周波数で動作する小型のFM−CWレーダを提供する。
【解決手段】FM−CWレーダは、ガンダイオードとバラクタダイオードとを有し、周波数変調された第1の信号を出力する電圧制御型発信器と、目標対象物に第1の信号を送信し、目標対象物により反射された第2の信号を受信する送受信アンテナ装置と、ダイオードを有し、第1の信号と第2の信号とを入力し、第1の信号と第2の信号との周波数の差を表すミキサ出力信号を出力するパッシブミキサと、パッシブミキサを流れる電流の変化分を検出する電流検出回路と、検出されたパッシブミキサを流れる電流の変化分に基づいて、ガンダイオードに電圧を変えて印加することにより、電圧制御型発信器の周波数変調された信号の出力電力を一定にする電圧印加回路とを有する。
(もっと読む)
物体検出装置
【課題】 レーダによる検出結果と画像処理による検出結果の時間的なずれに起因する誤差の影響を低減し、物体検出精度を向上させることができる物体検出装置を提供する。
【解決手段】 物体検出装置1の物体検出部10は、レーダ検出部により検出された検出点データを参照して画像撮像部12により撮像された画像データを探索して、検出対象物体に対応する画像部分を検出する画像部分探索手段22と、レーダ検出部14により検出された検出点データから検出対象物体に対応する検出点データを抽出する検出点抽出手段24と、検出点抽出手段により抽出された検出点データに合わせて、画像部分探索手段により検出された画像部分の位置を補正する画像部分補正手段26とを有する。
(もっと読む)
レーダ干渉回避装置、及びレーダ干渉回避方法
【課題】互いのレーダ装置が干渉するか否かを確実に判断でき、干渉すると判断したときに対策を講じることによって、対象物の正確な情報を測定することのできるレーダ装置を提供する。
【解決手段】他車両と無線通信することによって当該他車両に搭載されたレーダから放射される電磁波が到達する領域、及び周波数帯域などの情報と、自車両に搭載されたレーダの電磁波の到達する領域、及び周波数帯域などの情報に基づき、自車両に搭載されたレーダと他車両に搭載されたレーダとが干渉する可能性があると判断したときに、互いのレーダから放射される電磁波を干渉しない状態に変更する。
(もっと読む)
レーダ装置制御方法、レーダ装置、移動体および送受信装置
【課題】他の移動体の相対向きを算出することができるレーダ装置制御方法、レーダ装置、移動体および送受信装置を提供すること。
【解決手段】移動体の所定の位置に設置された複数の送受信部が、移動体番号と設置位置番号とを含む信号を送信し、他の移動体に設置された複数の送受信部から送信される信号を受信した場合に、信号を受信した受信部、信号を送信した他の移動体、信号を送信した送信部が設置されている位置を特定することにより、他の移動体の相対向きを算出する。
(もっと読む)
21 - 40 / 86
[ Back to top ]