
Fターム[5J083AE02]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 測定対象 (1,034) | 船舶 (18)
Fターム[5J083AE02]に分類される特許
1 - 18 / 18
水中物体までの水平距離を算出するための水平距離算出システム及び水平距離算出方法
【課題】距離方向に音速プロファイルが変化しても、水中物体までの水平距離の算出誤差を低く抑え、かつ音波伝搬経路の観測誤差や音波伝搬中のゆらぎの影響を極力小さくする。
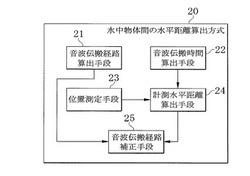
【解決手段】音速プロファイルに基づいて水中物体までの音波伝搬経路を算出する音波伝搬経路算出手段21と、水中物体までの音波伝搬時間を算出する音波伝搬時間算出手段22と、送信物体と受信物体の位置をそれぞれ測定する位置測定手段23と、送信物体及び受信物体の位置と音波伝搬時間算出手段22が算出した音波伝搬時間とに基づいて送信物体と受信物体との間の計測水平距離を算出する計測水平距離算出手段24と、計測水平距離に基づいて音波伝搬経路算出手段21が算出した音波伝搬経路を補正して補正後音波伝搬経路を生成する音波伝搬経路補正手段25とを備え、音波伝搬経路補正手段25が補正した補正後音波伝搬経路に基づいて水中物体までの水平距離を算出する。
(もっと読む)
探知距離計算システム、探知距離計算方法、探知距離計算プログラム

【課題】ソーナー装置による探知可能な領域を正確に算出する。
【解決手段】シグナルエクセスの値に基づいてソーナー部50による探知が可能であるか探知が不可能であるかを距離区間ごとに判定する探知可否区間初期設定部11と、探知が不可能であると判定された距離区間である探知不可区間の長さと、探知可能と判定された距離区間である探知可能区間の長さを検知し、各探知不可区間の長さとこの探知不可区間の前後両側に隣接した探知可能区間それぞれの長さとの関係に基づき探知不可区間を探知可能区間へと併合設定する探知可能区間併合部12と、併合設定された距離区間内における探知可能区間を前記探知可能設定区間として抽出する探知可能区間距離計算部14とを備えた。
(もっと読む)
画像ソナー用解析システム、画像ソナー用解析方法、画像ソナー用解析プログラム
【課題】ソナー画像から目標物を正確に識別する。
【解決手段】水上または水面下に位置する目標物の検出用ソナーが、送出した音信号の進行方向に沿って前記反射音レベルの分布解析を行うことにより得られた、前記進行方向の距離に対する反射音レベルの下がった割合が、予め設定された値より大きい領域をエッジ領域として検出するエッジ検出手段と、エッジ領域を端部として含み、且つ反射音レベルが2次元画像データに基づき算出された平均残響レベルより低い領域をシャドウ領域として検出する音圧レベル解析手段とを備えた。
(もっと読む)
目標運動解析方法、目標運動解析装置およびプログラム
【課題】目標運動解析結果が得られていない場合や目標運動解析結果の精度が悪い場合でも、解析収束を加速させるための観測船の運動パターンを指示し、計算負荷を増加させることなく、予測する観測船の運動パターン数を増加させる。
【解決手段】目標運動解析精度を判定し、目標運動解析結果が得られていない場合や目標運動解析結果の精度が悪い場合には、目標体の観測方位および観測方位変化率のみから解析収束を加速させるための観測船の運動パターンを指示し、目標運動解析結果の精度が良好の場合には、微分を用いた最尤法によりフィッシャー情報行列が最大となる観測船の運動パターンを算出する。
(もっと読む)
船舶推進音検出装置、船舶推進音検出方法、及び船舶推進音検出用プログラム
【課題】推進音が小さくても船舶から放出される船舶推進音を有効に検出することを可能とした船舶推進音検出装置等を提供すること。
【解決手段】到来する前記水中音波を音波信号として受信する水中音波受信器103と、この受信された音波信号をA/D変換するA/D変換器4と、このA/D変換された音波信号を周波数分析し且つ想定される船舶推進音の周波数帯で音圧レベルが周期的に変化する音圧波形データを周波数毎に抽出する船舶推進音抽出手段5とを有する。更に、この抽出された音圧波形データの音圧レベルの周期的変化率を周波数成分毎に算出する周期的変化率算出手段6と、この算出された音圧レベルの周期的変化率(周波数成分ごとの音圧変化率)の周期を周波数成分毎に前記船舶推進音の周期として特定する変動周期特定手段7とを備えたこと。
(もっと読む)
通信装置、通信システムおよび通信方法
【課題】電力を効率的に消費する水中通信装置を提供する。
【解決手段】通信装置A(10A)は、超音波を介して相手局と通信する通信装置であって、通信信号を生成し、生成した前記通信信号を前記相手局に送信する送信部14と、送信した前記通信信号が前記相手局で反射された反射信号を受信する受信部22と、前記通信信号を送信してから前記反射信号を受信するまでの時間に基づき、前記相手局までの距離を検出する距離計測部20と、検出した前記距離に応じて前記送信部14が送信する出力を制御する送信電力決定部38と、を備えることを特徴とする。
(もっと読む)
水中航走体の速度計測システム
【課題】マルチビームを用いることによって、一部の測深データを計測できなくても特徴箇所と速度を求められるようにする。
【解決手段】開示される水中航走体の速度計測システムは、水中航走体3に対してマルチビーム測深機301と、演算処理部310とを具えることによって、マルチビーム測深によって得られた水深メッシュデータから特徴箇所を検出するとともに、検出された特徴箇所から水中航走体の速度計算を行うことができるように構成されている。
(もっと読む)
聴覚的な表示のための装置及び方法
複数のスピーカー(220)が、該スピーカー(220)をさまざまに駆動することによって異なる空間的位置を聴覚によって示すことができるように空間的に異なる位置に配置されている再現空間(210)において、物体(200)の位置を聴覚的に表示するための装置(100)が、信号関連付け手段(110)と、スピーカー駆動手段(120)とを備えている。信号関連付け手段(110)は物体(200)に聴覚信号を関連付けるように構成されている。スピーカー駆動手段(120)は複数のスピーカー(220)のための1又は2以上のスピーカー信号(LS)を生成するように構成されており、物体(200)の位置を表示するための1又は2以上のスピーカー信号(LS)は、信号関連付け手段(110)によって物体(200)へと関連付けられた聴覚信号にもとづく。1又は2以上のスピーカー信号(LS)を再生したときに再現空間(210)内に物体(200)の位置が聴覚的に表示されるように1又は2以上のスピーカー信号(LS)を生成することができる。 (もっと読む)
潮流測定装置
【課題】絶対船速と対水船速との差から潮流を演算する際に、船舶の加減速及び回頭等があっても、常に安定した潮流を得ることができる潮流測定装置を提供する。
【解決手段】加減速検出手段45は、航法装置3から出力された絶対船速又は対水船速計測回路42から出力された対水船速に基づいて、船舶1が加速状態又は減速状態にあることを検出し、検出結果を加算器50に出力する。回頭状態検出手段46は、ジャイロコンパス2から出力された船首方位に基づいて、船舶1が回頭状態にあることを検出し、検出結果を加算器50に出力する。演算停止手段49の加算器50は、検出結果が入力されたときに、スイッチ51における潮流演算回路43と潮流値出力回路44との接続状態をオン状態からオフ状態に切り替えるように該スイッチ51を制御する。
(もっと読む)
複数の方位線からの物体の位置特定の方法及び装置
物体の場所を求める方法は、複数の観測場所からの物体の方位を表すデータを使用する。この方法は、(a)方位毎に、手順を使用して点の座標を導出することであって、この座標は、所定の場所とその方位線上の最も近い点との間の符号付き距離を表す第1の値pと、その方位線の角度を表す第2の値θとを含み、上記手順に従って、反対方向の同一直線上の方位が、互いに符号が反対である第1の値と、互いにπだけ異なる第2の値とを有する、導出すること、及び、(b)上記点を曲線フィッティングすることを規定するパラメータを導出することであって、当該パラメータは物体の場所を表す、導出することを含む。方位測定に関連付けられる信号対雑音比を表す値と、互いに対して相対的な観測場所を表す値及び物体に対して相対的な観測場所を表す値とを使用して、物体の場所の計算に対するそれらの影響を重み付けする目的で方位をグループ化することができる。  (もっと読む)
(もっと読む)
目標体運動解析方法及びその装置
【課題】 受波センサ位置の誤差によって生じる目標体状態量の推定値における誤差を抑制する。
【解決手段】 本発明は、目標体から放射される信号を、目標体と相対的に運動する観測体に取り付けた、空間的に離れた3個以上の受波センサで受信し、各受波センサ間の信号到来時間差の測定結果である観測時間差時系列を得、観測時間差時系列に対して所定演算を実行して、目標体に関する状態量を推定する。そして、観測時間差時系列に基づき、目標体の位置及び速度と共に、受波センサ位置をも評価対象としたセンサ位置含有評価関数を構成し、この評価関数を最小化する目標体の位置及び速度、並びに、受波センサ位置を探索して、これらパラメータの推定値を得ると共に、受波センサ位置の推定値で、評価関数の構成に適用する受波センサ位置を補正することを特徴とする。
(もっと読む)
GPSソノブイ
【課題】デジタル変調回路およびデジタル無線発信回路を備えることなく簡単な構成でソナー情報およびGPSの位置(緯度経度)情報の無線伝送を行うGPSソノブイを提供する。
【解決手段】航空機6から水中に投下されるソノブイは、フロート部10、浮上部20および水中部30よりなる。フロート部10はアンテナ11〜13を備え、水中部30はソナー受信回路31を備え、浮上部20は、GPSモジュール21、信号変換回路22、アナログFM変調回路24、無線発信回路25および信号変換回路22の緯度経度アナログ信号221とソナーの受信信号311を切り替える切替回路23を備えている。
(もっと読む)
マルチスタティック計測方法及び方式
【課題】海域の水中音速分布と水中目標位置を同時に推定し、高い精度で目標位置を計測する。
【解決手段】船舶Aの音波発信部1は音波を発信し、音波発信時刻計測部2で音波発信時刻を計測し、位置計測部3で船舶Aの位置を計測し、情報送信部4で前記時刻と位置を情報処理を行う船舶Cに送信する。船舶Bの音波受信部5は船舶Aからの音波を受信し、音波受信時刻計測部6で音波受信時刻を計測し、位置計測部7で船舶Bの位置を計測し、情報送信部8で前記時刻と位置を情報処理を行う船舶Cに送信する。船舶Cの情報受信部9は情報送信部4、8からの情報を受信後、音速分布計算部8で音速分布を、インバージョン法を用いて計算し、音速分布表示部9で表示し、水中目標位置計算部10は、先に計算した音速分布を利用し、水中目標Tからの反射音波の到達時刻を満たすように、水中目標位置を、インバージョン法を用いて計算し、水中目標位置表示部11で表示する。
(もっと読む)
目標体運動解析方法及び装置
【課題】 受波センサ位置の誤差によって生じる目標体の状態量の推定値の誤差を抑制できる目標体運動解析方法及び装置を提供する。
【解決手段】 本発明は、目標体から放射される信号を、目標体と相対的に運動可能な観測体に取り付けた、空間的に離れた3個以上の受波センサで受信し、目標体の位置や速度などの状態量を推定する目標体運動解析方法及び装置に関する。そして、各受波センサ間の信号到来時間差の測定結果である観測時間差時系列を得、この観測時間差時系列に対して、推定誤差を最小とする最適化手法を用いて、目標体の状態量を推定し、観測時間差時系列、及び、目標体について得られた状態量の推定結果から、推定誤差を最小とする最適化手法を用いて、少なくとも一部の受波センサの位置を推定し、推定されたセンサ位置に、該当する受波センサの位置を補正することを特徴とする。
(もっと読む)
CPA算出方法、CPA算出装置および画像処理装置
【課題】グラム表示からCPA算出までの一連の操作を自動化できるようにし、これにより操作員の負荷の軽減を図ったCPA算出方法、CPA算出装置および画像処理装置を提供すること。
【解決手段】音響グラム表示画像データを二値化したうえで画素膨張処理を施し、でシフト領域を前処理する。次に、前処理されたシフト領域の境界線を追跡してシフト領域を分割したのち、分割されたシフト領域を細線化処理してデジタルラインとする。次に、得られたデジタルラインを線分近似したのち上限周波数F1、下限周波数F2、中心周波数F0を求め、これらのパラメータを用いてCPAレンジRdを算出する。
(もっと読む)
音源位置推定方法及び装置並びにソーナー
【課題】 現実に沿わない仮定、条件等に起因する音源位置の推定誤差をなくし、実際の条件等に基づいて音源の位置を推定できる方法等を得る。
【解決手段】 推定海域において複数の仮想音源を配置したときの、海域の環境に応じた、仮想音源から受波地点までの複数の経路による音波の各到来時刻の理論値に基づく値を各仮想音源に対して到来時間差Table作成器3が算出し、観測した音波に基づいて、マルチパス波到来時間差測定器2が音源からの音波に関する値を算出し、音源からの音波に関する値と理論値に基づく値からコスト関数算出器4が算出したコストにより、音源位置推定器5が音源からの音波による到来時刻と一致又は最も近い到来時刻の仮想音源を決定し、仮想音源の配置位置を音源の位置と推定する。あるいは、決定した仮想音源及びその近傍の仮想音源の配置位置とこれらのコストから音源位置を推定する。
(もっと読む)
潜水船の追跡のための装置及び方法
潜水船(11)の追跡のための装置及び方法において、プラットホーム(13)は、潜水船(11)の現在位置の規定のための追跡装置(15)と一緒に水中内に投入され、かつ潜水位置で三次元的に安定にされるようになっている。このために、プラットホーム(13)は、水平方向若しくは垂直方向に作用する操縦駆動部(18,19)を有しており、該操縦駆動部は制御回路内に配置されている。  (もっと読む)
(もっと読む)
ソナー・システムおよびプロセス
【課題】ソナーがソナー自体の送信器から受信する信号と、意図された目標からのエコーとを、一定の線形性要件および排除要件に従い効果的に弁別する方法を提供する。
【解決手段】音響的エコー信号よりも60dB以上高く存在する直接的音響信号を弁別し得るソナー・システムおよび使用方法。
(もっと読む)
1 - 18 / 18
[ Back to top ]