
Fターム[5J083AF18]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 送受波器(センサ、ソーナー)の設置 (1,005) | 移動体設置 (814) | 水中航走体(潜水艦) (40)
Fターム[5J083AF18]に分類される特許
21 - 40 / 40
合成開口ソーナー
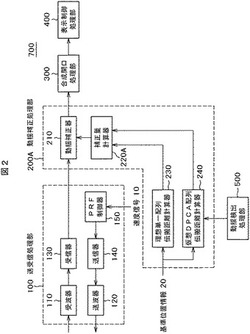
【課題】送受波器の動揺を補正し、合成開口処理への影響を軽減した合成開口ソーナーを提供する。
【解決手段】基準位置情報20により、1台の送波器と1台の受波器からなる単一配列の基準位置間の伝搬距離を計算する理想単一配列伝搬距離計算器230と、1台の送波器と複数台の受波器からなる配列と基準位置間の伝搬距離を計算するDPCA配列伝搬距離計算器240と、理想単一配列伝搬距離計算器230とDPCA配列伝搬距離計算器240の出力の伝搬距離差から補正量を計算する補正量計算器220と、補正量に基づき受信信号に補正を施す動揺補正器210と、合成開口処理部300と表示制御部400を組み合わせ、動揺検出処理部500からくる動揺情報に基づきDPCA配列伝搬距離計算器240の出力に反映させて動揺補正を行う。
(もっと読む)
水中航走体および障害物探知装置

【課題】海底の様子だけでなく、海面近くの状態も探知することの可能な障害物探知装置並びに該障害物探知装置を備えることにより、比較的浅い海域を円滑に航走することのできる水中航走体を提供することを目的とする。
【解決手段】水中航走体1に互いに間隔をあけて設けられ、該水中航走体1の前方に向けてビームを送出するとともに、該ビームの反射波を受信可能な複数のセンサからなるセンサ群3と、複数のセンサの検出結果から前方の障害物を検出する処理部とを具備し、各センサは、各センサから送出されるビームが交差することなく、かつ、前方に設定されたそれぞれ異なる目標領域に対して送出されるように配置されている。
(もっと読む)
管制型水中情報収集システム及び水中航走体管制システム
【課題】水中航走体による水中情報の収集効率を低下させることなく、一定の精度で位置検出を行うことができるとともに、また、複数の水中航走体を管制することで、効率よく水中情報を収集すること。
【解決手段】絶対位置取得部10により水上移動体3の絶対位置を取得するとともに、相対位置計測部11により水中航走体4の相対位置を計測し、これらの情報から水中航走体4の絶対位置を検出する。そして、この絶対位置情報を第1通信部13から第2通信部22へ送信することにより、水中航走体4に対して絶対位置情報を通知する。
(もっと読む)
目標体運動解析方法及び装置
【課題】 受波センサアレイの形状によらずに目標体の状態量に対する良好な解析結果が得られるようにする。
【解決手段】 本発明は、目標体から放射される信号を受波センサアレイで受信し、この受波センサアレイからの受波信号に基づいて、少なくとも目標体への方位観測値を得た後、目標体の状態量(位置や速度など)を推定するものである。受波センサアレイの形状に応じて規定される分布対称化関数を適用し、方位観測値の誤差の分布を左右対称にするように方位観測値を変換する。方位観測値を含めた観測値とその真の値との相違を評価するコスト関数における、方位観測値に関係する項に、分布対称化関数を適用した方位観測値の変換値を適用すると共に、方位観測値の真の値に関係する項として、真の値に分布対称化関数を適用したとみなしたものを用いる。このコスト関数を最小化する、目標体の状態量を探索して目標体の状態量を推定する。
(もっと読む)
水中航走体誘導方法及び装置
【課題】目標が母船から遠距離にある場合でも、水中航行体を精度良く目標に誘導する、誘導方法を得る。
【解決手段】水中航走体102から見た目標(体)104の方位情報を観測し、水中航走体102の母船101から見た目標104の方位情報および周波数情報を観測し、観測した方位情報及び周波数情報に基づいて、目標104の位置、針路及び速力を推定し、推定した目標104の位置、針路及び速力に対応して、水中航走体102の針路を決定し、決定した針路に水中航走体102を誘導する水中航走体102の誘導方法および装置である。
(もっと読む)
音波を放出するターゲットの方位測定方法
複数の電気音響変換器(11)を有する細長い水中アンテナ(10)によって、音波を放出するターゲットの方位を測定するための方法を提供する。本方法では、前記電気音響変換器(11)の受信信号から、水中の測定された音速値(Cmess)を使用して方位選択的に、前記ターゲットの水平方向のターゲット方位を求める。このような水中アンテナに付随して、とりわけ方位角が大きくなると方位測定結果に誤りを生じさせる原因となるシステム的な方位測定誤差を補償するため、音波伝搬モデルによって、前記ターゲット方位(βZk)によって予め決定されている音波伝搬方向での音波ビーム経過を計算し、該音波ビーム経過から、推定されたターゲット距離およびターゲット深度で、アンテナ位置における垂直方向の音波入射角(γk)を求める。垂直方向音波入射角(γk)から補正係数を導出し、該補正係数と前記測定された音速値(Cmess)とを乗算することによって該音速値(Cmess)を補正する。補正された前記音速値(Ceinstell)によって再び方位測定を行い、改善されたターゲット方位(βZk)を得る。  (もっと読む)
(もっと読む)
水底下探査方法及び装置
【課題】探査漏れを少なくできる水底下探査方法及び装置を提供する。
【解決手段】水中に音波を送波する送波器2と、物体3からの散乱波を受波する受波器4とを水中航行体5に搭載し、その水中航行体5を所定の水域Eaの周りで周回航行させつつ該水域内の水底下にある物体を探査する水底下探査方法において、あらかじめ水中の背景雑音や残響音を計測し、この背景雑音や残響音が大きいときには上記水域を狭く設定し、上記背景雑音や残響音が小さいときには上記水域を広く設定しておき、この設定された水域の周りで上記周回航行による探査を行う。
(もっと読む)
横距離探知率曲線算出装置及び方法、横距離探知率曲線算出用プログラム
【課題】 任意のソーナー捜索中心方位に応じて横距離探知率曲線を算出する。
【解決手段】 ソーナー捜索中心方位検出部1でソーナーを搭載するビークルからソーナービームを指向する方位を検出し、距離対探知率曲線取得部2でソーナー捜索中心方位における探知率断面分布から特定深度の距離対探知率曲線を算出し、最大・採用探知距離算出部3で距離対探知率曲線から一定探知率以上の範囲の最大値と最小値を算出し、通過距離算出部4で最大探知距離から最小探知距離までを通過する距離を横距離毎に算出し、探知機会数算出部5で発振間隔及び進行速力に基づき通過距離内での探知機会数を算出し、探知率積算部6で探知機会数とワンピング探知率に基づき探知率を積算する。
(もっと読む)
合成開口ソーナーシステムおよび送受波器の長さ制御方法
【課題】必要以上に長い送受波器の使用を防止可能な合成開口ソーナーシステムおよび送受波器の長さ制御方法を提供する。
【解決手段】送受信器11は、長さが可変であり、PRF調整器14は、送受波器11の長さを、検査対象物を調査するための調査条件に基づいて決定し、開口長制御部17は、送受波器11の長さを、その決定された長さに調整する。
(もっと読む)
水底物体探査方法及び装置
【課題】水中航行体を小型化し、より低コスト化できる水底物体探査方法及び装置を提供する。
【解決手段】送波器2から広角度で広がる低周波を送波し、受波器4を水中航行体5の長手方向に複数個並べて配置し、これら複数個の受波器4による受波信号を合成開口処理することにより、水中航行体5の長手方向に幅が狭い範囲からの散乱波を検出すると共に、上記合成開口処理による検出範囲を水中航行体5の長手方向に順次走査させ、水中航行体5の位置と走査順との組み合わせにより、時間が異なる同一物体3からの複数の散乱波を抽出し、これらの散乱波を重ね合わせて物体3の存在を判定する。
(もっと読む)
水中航走体、及び水中航走体の測位方法
【課題】位置の誤差が蓄積されない水中航走体の測位技術を提供する。
【解決手段】本発明による水中航走体は、マルチビーム測深器1と、海底面の各位置の水深を示す水深データが予め格納された水深データベース16を備える測位演算装置5とを具備する。マルチビーム測深器1は、海底面の当該水中航走体10からの深度を、当該水中航走体10の進行方向と垂直な垂直方向に分散して規定された複数の位置について計測する。測位演算装置5は、マルチビーム測深器1によって計測された深度から海底地形に対応する計測海底地形データを生成し、計測海底地形データと水深データベース16に格納された水深データとから、マッチング処理によって当該水中航走体10の位置を特定する。
(もっと読む)
広帯域振動子
【課題】 1つの振動子で2帯域以上の広帯域特性を確保することができるようにし、これにより、送受波器の小型軽量化を図ることができるとともに、実装スペースが小さい水中航走体に、2帯域以上の広帯域で標的の捜索、類別が可能なアクティブソナー装置を装備することができる広帯域振動子を提供する。
【解決手段】 軸方向に積層された複数の圧電振動子11a〜11dの両端部にそれぞれフロントマス12及びリアマス13が設けられたランジュバン型の広帯域振動子10において、フロントマス12は、数種の共振モードを形成すべく、先端側に樹脂部材12a1が配置されるように、音響放射面である圧電セラミック振動子11aの端面から先端側に向けて金属部材12b2、樹脂部材12a2、金属部材12b1、樹脂部材12a1の順に軸方向に交互に積層されて、4層構造とされている。
(もっと読む)
目標体運動解析方法及びその装置
【課題】 受波センサ位置の誤差によって生じる目標体状態量の推定値における誤差を抑制する。
【解決手段】 本発明は、目標体から放射される信号を、目標体と相対的に運動する観測体に取り付けた、空間的に離れた3個以上の受波センサで受信し、各受波センサ間の信号到来時間差の測定結果である観測時間差時系列を得、観測時間差時系列に対して所定演算を実行して、目標体に関する状態量を推定する。そして、観測時間差時系列に基づき、目標体の位置及び速度と共に、受波センサ位置をも評価対象としたセンサ位置含有評価関数を構成し、この評価関数を最小化する目標体の位置及び速度、並びに、受波センサ位置を探索して、これらパラメータの推定値を得ると共に、受波センサ位置の推定値で、評価関数の構成に適用する受波センサ位置を補正することを特徴とする。
(もっと読む)
水中探知装置
【課題】
エコー反射物の速度情報を加味した探知情報を表示画面上に表示することができる水中探知装置を提供することを目的とする。
【解決手段】
水中に超音波を送信して対象物からの反射エコーを受信して表示する水中探知装置において、通過帯域周波数の一部に阻止帯域を有するバンドパスフィルタを用いて受波信号のフィルタリングを行うフィルタ処理部を備え、前記阻止帯域を、移動速度がゼロの物標で反射した信号の周波数帯域とする。これにより、海底やプランクトン層からの反射エコーを除去し、速度を有して移動する魚群等からの反射エコーのみを表示画面上に表示することができる。
(もっと読む)
水中航走体の検出位置修正方法およびシステム
【課題】 水面に浮上する手間やトランスポンダなどを設置する手間などを省けるようにする。
【解決手段】 水中航走体に予め与える航走経路中に、相互に交差する緯度検出経路44と経度検出経路46とからなる位置修正用経路43を設定する。水中航走体は、慣性航法により検出した位置に基づいて、緯度検出経路44と経度検出経路46とを連続して航走する。位置修正用経路43を航走中の水中航走体と支援船との相対位置を音響測位する。支援船について求めた位置と音響測位した相対位置とに基づいて、水中航走体が実際に航走した緯度、経度を求める。水中航走体が実際に航走した緯度、経度と位置修正用航路との偏差δLAT、δLONを求め、この偏差を水中航走体に与えて検出位置を修正する。
(もっと読む)
目標体運動解析方法及び装置
【課題】 受波センサ位置の誤差によって生じる目標体の状態量の推定値の誤差を抑制できる目標体運動解析方法及び装置を提供する。
【解決手段】 本発明は、目標体から放射される信号を、目標体と相対的に運動可能な観測体に取り付けた、空間的に離れた3個以上の受波センサで受信し、目標体の位置や速度などの状態量を推定する目標体運動解析方法及び装置に関する。そして、各受波センサ間の信号到来時間差の測定結果である観測時間差時系列を得、この観測時間差時系列に対して、推定誤差を最小とする最適化手法を用いて、目標体の状態量を推定し、観測時間差時系列、及び、目標体について得られた状態量の推定結果から、推定誤差を最小とする最適化手法を用いて、少なくとも一部の受波センサの位置を推定し、推定されたセンサ位置に、該当する受波センサの位置を補正することを特徴とする。
(もっと読む)
水中移動体の角度計測装置及び水中移動体の角度計測方法
【課題】広域で自己の位置を計測できる広域位置計測システムを提供すること。
【解決手段】本発明の広域位置計測システムは、音響を用いて水中の物体の位置を測定する広域位置計測システムにおいて、極低周波の音波信号を送信することをその特徴とする。この広域位置計測システムは、極低周波の音波信号を送信する発音装置(ピンガーまたはトランスポンダ)1〜3と、AUV10に設けられ、前記各発音装置1〜3から送信されるそれぞれの音波信号を受信するフィルタ付受波器11と、前記フィルタ付受波器11によって受信された音波信号に基づいて、前記AUV10の位置を計測する演算処理部103とを備える。
(もっと読む)
信号処理方法、信号処理装置
【課題】効率的な計算で超低速の速度分解能を得ることができる信号処理方法、信号処理装置を提供する。
【解決手段】30kHz付近に周波数スペクトルが展開している信号を24kHzでアンダーサンプリングすることにより、前記周波数スペクトルは6kHz付近に展開する。この周波数スペクトルの中心周波数をDC=0Hzに周波数シフトする場合、中心周波数とサンプリング周波数との比が1/4であるため、サンプリングデータに順次1,−j,−1,jを乗ずるのみでこれを行うことができる。さらに、この定数をFIRフィルタの係数に埋め込んでおき、サンプリングデータが4n(nは正の整数)だけ進む毎にFIRフィルタの演算を行ってデータを出力することにより、周波数シフト、FIRフィルタ処理および4nのデシメーションを一括して処理することができる。
(もっと読む)
水中航走体の位置計測システム及び、位置計測方法
【課題】 水中航走体から発せられるピンガ信号を正確に受信するとともに、受信したピンガ信号について信号か残響によるノイズかを判別し、水中航走体の位置を算出する位置計測システムを提供する。
【解決手段】 水中航走体から所定の時刻で深度情報を含んだ第1及び第2パルスからなるピンガ信号を発信し、このピンガ信号を複数の計測ブイで受信し、計測ブイの位置情報とともに計測装置へ送信する。計測装置では所定の時刻からの伝搬時間から距離を求め、水中航走体の深度情報と、計測ブイの位置情報とに基づき、水中航走体の正確な位置を算出する。
(もっと読む)
水中の物体の位置をリアルタイムで決定するための方法および装置
様々なサンプリングレートで動作する多数のセンサを使用して水中の物体の位置決定をリアルタイムで達成するため、および中でも特に、検査業務を実行するために、決定された位置をリアルタイムで使用するための方法および装置が開示される。 (もっと読む)
21 - 40 / 40
[ Back to top ]