
Fターム[5J083AF20]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 送受波器(センサ、ソーナー)の設置 (1,005) | 移動体設置 (814) | ソナーブイ(魚群探知ブイ) (12)
Fターム[5J083AF20]に分類される特許
1 - 12 / 12
ホースラインの形状検出システム
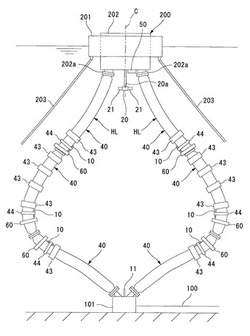
【課題】海中に配置されているホースラインの形状確認を行うことができ、しかも油の給送が行われている間や海象条件が悪い時でも正確な形状確認を行うことのできるホースラインの形状検出システムを提供する。
【解決手段】検出装置20から5.5kHzの音波が海中に向かって発信され、その音波に応答して各トランスポンダ10,11からそれぞれ所定の周波数の音波が発信され、検出装置20によって各トランスポンダ10,11との距離及び検出装置20に対する各トランスポンダ10,11の配置されている方向が検出される。また、検出装置20の検出結果に基づいて各トランスポンダ10,11の位置座標が前記所定時間おきに制御ユニット30によって演算されるとともに、前記所定時間おきに記憶装置31に記憶される。
(もっと読む)
音響反射体

本発明による音響反射体は、コアを取り囲むシェルを含み、このシェルは、シェルの表面に入射した音波をコア内に伝達して集束させ、入射領域の反対側に位置するシェルの領域で反射させて、反射体から反射音響信号を出力することができる。また、シェルはコアを有し、シェルのコアに対する寸法は、シェル壁に入射した音波の一部がシェルに結合し、シェルの円周に沿って誘導され、次に再放射され、反射体から出力された反射音響信号と合わさって強い反射音響信号が出力されるように設定される。コアにおける音波伝達平均速度に対するシェルにおける音波伝達速度の比は、好ましくは2.74〜3.4であり、より好ましくは2.74〜2.86である。水中のパイプラインへの応用や、洗掘の測定及び反射体のアレイにも適用できる。 (もっと読む)
水中画像全方位表示処理装置及び方法
【課題】送受波器自体が回転してしまう可能性があるソーナーの場合にも、適切な回転補正を行うことによって、全方位において正確な水中画像を表示する。
【解決手段】開示される水中画像全方位表示処理装置は、送波部S001〜S004において複数の送波アレイから順次送波したタイミングで、受波部において受波アレイR001を構成する複数個の受波素子で目標からの反射音を受信して取得したそれぞれの送波アレイからの放射音に対応する反射音の受波データに基づいて得られた画像処理後の位置データに対して、受波アレイで受信した三方向の回転行列による演算を行って、送受波器の向きをメモリ210のジャイロデータによってヨウ,ピッチ,ロールの三方位のデータとして随時取得する位置補正処理回路200と、取得したデータを用いて演算結果を送受波器固定座標から地球を基準とした絶対座標に座標変換を行って合成画像を得る画像合成処理回路220とを備えている。
(もっと読む)
シーアンカーの収納構造
【課題】シーアンカーの水中での展張を安定的に行うことを可能とするとともに、展張後に不要となるケースを展張後に分離させて、構成として残さないようにすることが可能なシーアンカーの収納構造を提供する。
【解決手段】シーアンカー1を収納する収納空間を有する半割のケース10を備え、ケース10を構成する2つのケース本体11、12のそれぞれの内面側に、シーアンカー1を載置する載置面11a,12aを設け、各載置面11a,12aは、互いに係合してケース本体11、12同士を係止するための係合部を有し、水中に投下された際に作用する外力によりシーアンカー1が回転すると、その回転力が載置面11a,12aに作用して係合部の係合が外れ、ケース10が解体するものである。
(もっと読む)
音響装置及び音響装置における音響素子収納方法
【課題】アーム部材の数を増やすことなく、周方向に配列される音響素子の数を増加させて、周方向の指向性を向上させるとともに、非使用時には、複数の音響素子を装置本体の外周面に密接状又は近接状に沿わせて収納する。
【解決手段】複数の音響素子3を、装置本体2を中心とする円周上に展開配置した状態で使用し、非使用時には、複数の音響素子3を装置本体2の外周面に沿わせて収納する音響装置1Aであって、円周上で複数の音響素子3を支持する環状音響素子配列部4を、それぞれが複数の音響素子3を支持する複数の円弧状音響素子配列部5に分け、非使用時には、円弧状音響素子配列部5を、その内周が装置本体2の外周に沿うように、装置本体2に対して傾斜させた状態で収納する。
(もっと読む)
GPS内蔵高機能ブイ
【目的】
GPSから得られるブイの位置情報を有効利用し、海上における情報ネットワークを提供する。
【構成】
暗礁の場所や航路などを知らせる標識であり、また、海面水温や海上風速の検証に用いられる観測計であるブイにおいて、複数の所定の場所に配置されたフロート内に、無線中継装置と外部入力端子とGPSを備えることにより、海上あるいは海中の情報を提供する装置であって、該無線中継装置により遠洋における情報をも地上局に伝送できることを特徴とするGPS内蔵高機能ブイ。
(もっと読む)
ブイおよび魚群探知システム
【課題】魚群探知機を搭載した漁船や模型ボートで魚群を探し出すという手間がなくなり、効率的に漁を行うことができ、しかも漁船の出港前、出港中に関わらず最新の魚群情報を得ることができ、データベースにも最新の魚群情報を反映させることができるブイおよび魚群探知システムを提供すること。
【解決手段】ブイに魚群探知機とGPS受信機と無線機とを搭載する。ブイから魚群情報および位置情報を無線で情報収集センタに送信し、データベースとして保存する。船舶は、無線でデータベースにアクセスし、最新の魚群情報および位置情報を無線で取得し表示端末に表示させる。
(もっと読む)
ソノブイ信号処理方式
【課題】ソノブイ信号処理において、周波数分析結果における雑音成分の周波数特性を補正しつつ、時間軸積分の積分時間を短縮し、周波数偏移の大きい信号のS/N低下を防ぐ。
【解決手段】主方向指向性ビーム形成部(3)は、DIFAR復調処理部(2)で復調されたNS,EW,OMNI信号を使用して、着目している任意の方位に指向性を向けたビームを形成し、他方位指向性ビーム形成部(4)は主方向を除く複数の他方位に指向性を向けたビームを形成する。周波数分析部(5)では、主方向ビーム及び他方向ビーム全ての周波数分析を行う。周波数成分平均化部(6)は、主方向を除く複数の他方位ビーム周波数分析結果に対して、周波数成分単位で複数の他方位ビーム間の平均処理を行う。主方位周波数成分正規化部(7)は、主方向ビームの周波数分析結果に対して、周波数成分平均化部(6)の出力を使用して、周波数成分毎の正規化を行う。
(もっと読む)
アクティブソナーのデータ解析方法及び記憶媒体
【課題】アクティブソナーにおいて、ターゲットから反射して得られたエコーデータは瞬間的に存在するのみであり且つこのエコーは様々な影響を受け、その包絡線は不規則で多種多様になる。そのため、斯かるアクティブソナーのエコーを画一的に解析し、2次元に可視化する方法はなく、統計的なものに頼らざるを得なかった。
【解決手段】検波後のエコーデータを画一的に解析するために、伝播損失補正正規化処理(ステップA2)を行う。そして、この補正後の波形データについて、特徴データ抽出処理(ステップA3)において、ピークレベル検出処理(ステップB1)、エコー長検出処理(ステップB2)およびエコー形状判定処理(ステップB3)を含む特徴データ抽出処理(ステップA2)を行う。また、特徴データを自己組織化マップに入力して学習を行って、これらの特徴に基づいて分類を行い、2次元可視化する。更に、補正後波形データを用いて誤分類データを検索し、マップ上に表示するための誤分類データ検索処理(ステップA12)を行う。
(もっと読む)
方位測定方法、方位測定方式及び水中音響計測ブイ
【課題】簡易な処理により雑音に影響されない安定した方位精度を実現可能な方位測定方法、方位測定方式及び水中音響計測ブイを提供する。
【解決手段】受波部1は目標の信号波長の略0.5倍の間隔で配置され、互いに直交するビームを形成する受波器を有し、整相処理部2は前記受波器1の出力に基づき方向の異なる複数のビームを形成する。ビーム割り当て部3は、前記複数のビームにより互いに異なる複数の直交するビームの組みを割り当て、ビーム選定部4は前記直交するビームの組みにより受信した目標信号の信号レベルの和が最大(又は前記信号レベルの差が最小)となる直交するビームを選定する。方位検出部5は前記選定した直交するビーム及びその受信信号に基づき方位を検出する。
(もっと読む)
CPA算出方法、CPA算出装置および画像処理装置
【課題】グラム表示からCPA算出までの一連の操作を自動化できるようにし、これにより操作員の負荷の軽減を図ったCPA算出方法、CPA算出装置および画像処理装置を提供すること。
【解決手段】音響グラム表示画像データを二値化したうえで画素膨張処理を施し、でシフト領域を前処理する。次に、前処理されたシフト領域の境界線を追跡してシフト領域を分割したのち、分割されたシフト領域を細線化処理してデジタルラインとする。次に、得られたデジタルラインを線分近似したのち上限周波数F1、下限周波数F2、中心周波数F0を求め、これらのパラメータを用いてCPAレンジRdを算出する。
(もっと読む)
海中センサ集合システム、基地局、および最適航法装置
【課題】魚群の存在を検知し、今現在の魚群の位置に関する情報を取得することが可能な海中センサ集合システム、海中センサ集合システムから魚群に関する情報を取得する基地局、および当該基地局から取得した魚群に関する情報に基づいて漁船を誘導する最適航法装置を提供する。
【解決手段】海中センサ装置3は超音波レーダを備え、ある頻度で超音波パルスを送信する第1の動作状態と、当該頻度よりも高い頻度で超音波パルスを送信する第2の動作状態のいずれかで動作する。海中センサ装置3は第1の動作状態で魚群を検知して報知信号を基地局4に送信する。基地局4は、報知信号に基づいて第2の動作状態とすべき海中センサ装置3を指定し、動作指令信号を海中センサ集合システム2に送信する。動作指令信号を受信し、自らが指定されたと認識した海中センサ装置3は、第2の動作状態での動作を開始する。
(もっと読む)
1 - 12 / 12
[ Back to top ]