
Fターム[5J083BE58]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 受信信号処理 (1,335) | 重み付け(係数付与) (19)
Fターム[5J083BE58]に分類される特許
1 - 19 / 19
アクティブソーナー装置及びその信号処理方法
【課題】アクティブソーナー装置において、目標をより確実に検出できるようにする。
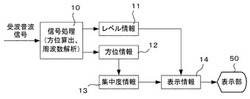
【解決手段】アクティブソーナー装置における信号処理方法は、第1の時間幅を有する音波信号を媒質に送波することと、媒質を伝播してきた音波信号を受波音波信号として受波することと、受波音波信号の時間軸を第1の時間幅よりも短い第2の時間幅で区切ったものをそれぞれ時間セルとして、各時間セルごとに、受波音波信号の到来方位と強度とを求めることと、各時間セルごとに、その時間セルを含む複数の連続する時間セル内での到来方位の方位集中度を算出し、その時間セルでの強度に方位集中度を重み付けしたものを検出値とすることと、を有する。
(もっと読む)
超音波診断装置

【課題】超音波診断装置において、整相加算後の信号に含まれる不要波成分の抑圧を適切に行う。特に過剰な抑圧がなされないようにする。
【解決手段】スペクトル演算部34は、整相処理後(遅延処理後)かつ加算処理前の受信信号列に対して、素子配列方向に沿って信号レベルをサンプリングして複数のサンプリング値からなる波形を得て、それに対する周波数解析により方位スペクトルを取得する。方位特性処理部36は、方位スペクトルに対して、前記整相処理及び加算処理により生じる振動素子列の方位特性を用いた重み付け処理を適用することにより、重み付け後の方位スペクトルを生成する。係数演算部38は、重み付け後の方位スペクトルに基づいて不要波成分抑圧用の係数を演算する。乗算器40は、加算部28の出力信号に対して係数を乗算することにより不要波成分を抑圧する。乗算に代えて減算を利用することも可能である。
(もっと読む)
位置検出装置、方法及びプログラム
【課題】必要な計算量が少なく、信頼性の高い測定結果を得ることができる位置検出装置を提供する。
【解決手段】装置は、各ランドマーク装置との距離の履歴に基づき、新たに測定した各ランドマーク装置との距離が異常であるか否かを判定する距離異常判定手段と、各ランドマーク装置の位置情報と、各ランドマーク装置との距離に基づき、カルマン・フィルタにより現在位置を求めて出力する位置判定手段とを備えており、位置判定手段は、新たに測定した第1のランドマーク装置との距離が異常である場合、新たに測定した第1のランドマーク装置との距離から、カルマン・フィルタによる、その予測値を引いた値が大きい程、小さくなる重み係数を算出し、算出した重み係数によりカルマン・ゲインを調整し、調整後のカルマン・ゲインにより現在位置を求める。
(もっと読む)
ストリーミング測定値からストリーミング信号を再構築するための方法
【課題】方法が、測定値の作業セット、測定システムの作業スナップショット、内部作業信号推定値、及び外部作業信号推定値を保持することによって、ストリーミング測定値からストリーミング信号xnを再構築する。
【解決手段】現在の測定値の作業セットを使用して、内部作業信号推定値、測定システムの作業スナップショット、及び信号スパース性のモデルが精緻化される。外部作業信号推定値がリフレッシュされる。外部作業信号推定値の係数のサブセットが出力にコミットされる。次のストリーミング測定値及び対応する次の測定ベクトルが受信される。測定値の作業セット、測定システムの作業スナップショット、及び内部作業信号推定値が更新されて、次の測定値及び対応する測定ベクトルが組み込まれる。最も古い測定値及び対応する最も古い測定ベクトル、並びにコミットされた係数のサブセットの効果が除去される。
(もっと読む)
音響信号に対する情報の埋め込み装置および音響信号を利用した位置検出装置
【課題】 可能な限り少ない数のスピーカから発せられる音を利用して、二次元における詳細な位置を特定することが可能な音響信号に対する情報の埋め込み装置および音響信号を利用した位置検出装置を提供する。
【解決手段】 所定長のビット列で構成される9種のIDを用意しておき、ID11のビット値およびID11とID31、ID11とID13のビット値の異同に基づき所定周波数成分の強度を変化させた音響信号をFLスピーカから出力する。同様な処理を、他のチャンネルに対しても行い、所定周波数成分の強度を変化させた音響信号をFRスピーカ、BLスピーカ、BRスピーカから出力する。4つのスピーカに囲まれた範囲に設置されたマイクロフォンでは、それぞれID11からID33を抽出し、事前に記録したIDと位置との対応関係に基づいて、対応する位置を検出する。
(もっと読む)
目的物及び動作検出
例えば、人間の手のモーション、位置、若しくは構成は、夫々の時間フレームで複数の送信信号を送信するステップ、複数の受信信号を受信するステップ、送信信号及び受信信号を利用して複数のチャネルインパルス応答を判別するステップ、近接する時間フレームに対するインパルス応答を相互に近接させて、インパルス応答のマトリクスを規定するステップ、及び、モーション、位置、若しくは構成に対応するパターン(22)に対する上記マトリクスを分析するステップによって、認識され得る。  (もっと読む)
(もっと読む)
パーティクルフィルターに基づく音響センサーを利用した3次元空間での客体追跡方法
パーティクルフィルターに基づく音響センサーを利用した3次元空間での客体追跡方法が開示される。従来のベアリング−オンリートラッキングのためのパーティクル・フィルタリング・アルゴリズムを3次元空間で直接的に確張する代わりに、本発明は、3次元パーティクルフィルターを多様でなおかつ簡単な2次元パーティクルフィルターに再構成する。2次元パーティクルフィルターに対する再構成及び選択は、ノイズ環境での音響センサーの特性に基づく。本発明は、多重パーティクルフィルター結合で拡張されるが、本発明の剛健さと性能は、ラオの理論限界(Cramer−Rao Lower Bound:CRLB)を使って証明されうる。本発明は、計算の複雑性を減少させながらも、正確な3次元客体追跡を行うことができる長所がある。 (もっと読む)
目標信号検出装置及び目標信号検出方法
【課題】目標の位置を予測する閾値を制御することにより、目標を安定して検出することができる目標信号検出装置を得ることにある。
【解決手段】送受波器は、水中に音波を発信し、目標からの反響音を受信処理する。信号処理部は、受信信号が有する複数の要素を抽出し、抽出した特徴素を複数の時系列信号として出力する。信号検出部は、時系列信号の目標らしき信号を抽出し、特徴素を算出する。目標検出部は、時系列信号ごとに目標信号を統合して位置を算出する。目標類別部は、統合された各特徴素に対して重み付けを行い、統合された目標信号の目標らしさの程度を示す確信度を算出する。目標追尾部は、目標の予測位置を算出し、実際に検出した目標との相関を実施する。目標検出最適化処理部は、目標の予測位置を利用し、信号検出部を最適化する。
(もっと読む)
位置推定装置、その方法、そのプログラム、およびその記録媒体
【課題】高精度に信号源などの位置を推定する。
【解決手段】K個(Kは1以上の整数)の放出手段12kから放出される放出信号CkとN個(Nは1以上の整数)の信号源17nから発せられる信号源信号AnとをM個(Mは2以上の整数)の収音手段11mが収音したMチャネルの収音信号Bmを用いて、当該Mチャネルの収音信号Bm間の遅延時間差である測定収音間遅延時間差τijnを測定し(15、S2)、K個の放出手段12kに入力されるKチャネルの入力信号EkとMチャネルの収音信号Bmを用いて、Kチャネルの放出信号CkのそれぞれとMチャネルの収音信号Bmのそれぞれとの間の遅延時間差である測定収音放出間遅延時間差δkmを測定し、測定収音間遅延時間差τijnと、測定収音放出間遅延時間差δkmとを用いて収音手段11mの位置、放出手段12kの位置、信号源Anの位置を推定する。
(もっと読む)
超音波映像システム及びスキャンラインデータ形成方法
【課題】プローブ内の複数の変換子の受信信号から複数のスキャンライン及びフレームを形成する超音波映像システム及びスキャンラインデータ形成方法を提供する。
【解決手段】複数のスキャンラインデータ形成部を用いて複数のスキャンラインデータを形成する。各スキャンラインデータ形成部は対応する少なくとも一つの変換子の受信信号から得られた受信データを用いて担当スキャンラインのスキャンラインデータ及び補充スキャンラインの補充データを形成する。担当スキャンラインのスキャンラインデータを形成するために、受信データから担当スキャンラインの部分データを形成し、担当スキャンライン別部分データに少なくとも一つの他スキャンラインデータ形成部から入力される補充スキャンラインデータを反映させる。
(もっと読む)
自動追尾スキャニングソナー
【課題】予測した魚群予測位置を捉えるように次回の水平スキャンにおける俯角θを制御するとともに、予測に誤差が含まれる場合にもより良い俯角に自動的に回復させることができる魚群追尾スキャニングソナーを提供すること。
【解決手段】標的である魚群を次回俯角を予測して予測追尾を行うとともに、魚群エコー強度総和が小さくなった場合には、現在の俯角から指定された所定の角度範囲内で受波ビームの俯角を振って追尾再開条件を満たす魚群エコー強度総和が得られる俯角を追尾再開時俯角として決定し、この追尾再開時俯角を基準として予測追尾を再スタートする。
(もっと読む)
複数の目標が可能な位相不定性の解決方法
位相測定の原理によって距離情報を得るために、少なくとも2つの変調された波長λiを有する周期信号が二つあるいはそれ以上の対象物体に送信され、その反射が受信され、関係する複数の位相φiが決定され、J個の対象物体に割り当てられる個々の対象物体の位相φijに分解される。位相の不定性を解決するために、少なくとも1つの対象物体が配置された不定性の間隔は、所定の幅を有する複数の区画5に分割され、その区画5はカウンタの読みと距離が割り当てられる。カウンタの読みは、可能性のある対象物体の距離に割り当てられる区画5に加算される。その加算は、周期性の連続な変数と全ての位相に対し実行される。絶対位相あるいは少なくとも二つの対象物体からの真の対象物体距離Djは、カウンタの読みの分布から決定される。  (もっと読む)
(もっと読む)
干渉性結像装置
【課題】視野に渡って迅速な走査を可能とし従来の手法に内在するアーチファクトを低減可能な超音波診断装置を提供する。
【解決手段】1以上のビームを送信する変換アレイを使用し、それらビームは、複数の励起事象について走査され、個々の励起事象後に、受信走査線上の1以上の受信ビーム信号を検出し、それら受信された信号を対応する電気信号に変換する。その方法及び装置は、加えて、視野の少なくとも一部に渡って、受信走査線上で取得されたそれら電気信号の位相及び振幅情報の両方を保持する干渉性サンプルを捕捉及び記憶し、また、別個の受信ビームに関連する、記憶された干渉性サンプルを結合して、合成走査線上に整列した新たな干渉像サンプルを合成する。更に、合成された干渉像サンプルを検出し、結果として得られる像のフィールドを表示又は記録する。
(もっと読む)
多重ビームの形成方法および装置
【課題】 従来技術のビーム形成の限界を本発明によって処置する。
【解決手段】 時分割多重を用いたネットワークを形成する多重光を形成する装置および関連する方法が開示されている。並列な数セットの光線が所定のサンプリングクロックレートで動作するネットワークハードウェアに代えて、より単純で単一のハードウェア単一部分が、サンプリングクロック速度と成形されるビームの数との積に等しいより早い速度で動作する。各素子(26a〜26m)からの受信された各サンプルは、各ビームにつき一つのビットストリームに時分割多重化されている。これらの時分割多重方式の要素のサンプルは、要素ごとに望まれる位相変移/時間遅延を適用するために重みが付けされる(30、32)。各重み付けの結果は、カスケード遅延パイプライン(34)で延期され、所定の時分割瞬間にビームを成形するためにカスケードコンバイナ(36)で結合される。この処理は、次のビームを形成すべく、配列の各要素からの時分割多重サンプルおよび重み付けの次のセットのために所定の時間に繰り返される。この処理は、サンプル時間間隔の終端まで、すべてのビームのために繰り返される。 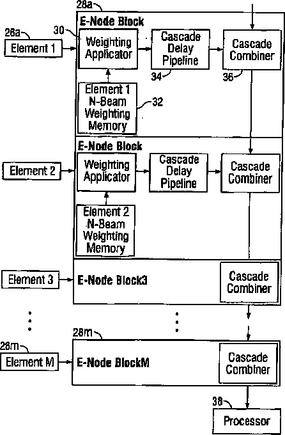 (もっと読む)
(もっと読む)
アクティブソナーのデータ解析方法及び記憶媒体
【課題】アクティブソナーにおいて、ターゲットから反射して得られたエコーデータは瞬間的に存在するのみであり且つこのエコーは様々な影響を受け、その包絡線は不規則で多種多様になる。そのため、斯かるアクティブソナーのエコーを画一的に解析し、2次元に可視化する方法はなく、統計的なものに頼らざるを得なかった。
【解決手段】検波後のエコーデータを画一的に解析するために、伝播損失補正正規化処理(ステップA2)を行う。そして、この補正後の波形データについて、特徴データ抽出処理(ステップA3)において、ピークレベル検出処理(ステップB1)、エコー長検出処理(ステップB2)およびエコー形状判定処理(ステップB3)を含む特徴データ抽出処理(ステップA2)を行う。また、特徴データを自己組織化マップに入力して学習を行って、これらの特徴に基づいて分類を行い、2次元可視化する。更に、補正後波形データを用いて誤分類データを検索し、マップ上に表示するための誤分類データ検索処理(ステップA12)を行う。
(もっと読む)
任意配置のマイクロホンアレイによる非線形ビームフォーミング
【課題】 従来のフィルタの設計法(BF)の遅延和BFでは、位相のみで簡単に処理が可能なものであるが、ビームが広く、球や不等間隔アレイの時はピーク方向が保証されないもので、サイドローブが大きくなっていた。
【解決手段】 入力に応じてビームフォーミング(BF)の係数を再設計し、高分解能なビームフォーミング(BF)実現したもので、球形アレイ等を含め任意のマイクロホン配置でビームフォーミング(BF)を可能とし、更に、数9によるビームフォーミング(BF)のビーム方向を操作して得られる強度分布をもとに重みを計算し数10によりビームフォーミング(BF)を再設計を行う。
(もっと読む)
超音波送受波器および水中探知装置
【課題】円筒部と半球部とからなる送受波器において、振動子の配列を工夫することにより、垂直方向のグレーティングローブを抑制するとともに、指向性偏差を最小限とする。
【解決手段】円筒部1Aでは、1つの振動子に隣接する6個の振動子が正6角形8の各頂点に位置するように振動子10aを配置し、また、正6角形8の対向する一組の辺9が鉛直方向を向くように配置する。半球部1Bでは、半球部1Bの球面に内接する正12面体を構成する正5角形を球面上に投影して得られる図形を球面5角形5としたとき、球面5角形5の構成要素をなす球面3角形6の頂点と、球面3角形6の各辺を等分割した点と、これらの等分割点を結ぶ円弧により形成される小さな球面3角形の重心とにそれぞれ振動子10bを配置する。
(もっと読む)
スキャニングソナー
【課題】広範囲を探知することのできるスキャニングソナーを提供する。
【解決手段】球形の送受波器1の振動子から超音波を送信することにより、送受波器1の周囲に傘状の送信ビームTBが形成される。また、スキャニングソナーの受信ビーム形成部で送受波器1の各振動子の受信信号の位相や受信開口の大きさなどを制御することによって、受信ビームRBが形成される。この受信ビームRBは、その俯角が送信ビームTBの俯角αと等しくなるように形成される。また、受信ビームRBの上下方向の広がり角θVは、探知距離Dが長くなるに従って小さくなるように制御される。
(もっと読む)
ソーナー方法及び水中画像ソーナー
【課題】 受波した周波数の組をマトリックス状にデマッピングし、受信ビーム方向とすることによりデータ処理量を削減する。
【解決手段】 送波器4は、周波数帯が割り当てられた水平/垂直の各1列から成るクロスファンビーム方式で構成される。送信制御部1は、送波音の送信ビーム方向をマトリックス状に走査させると共に、走査に同期して送波音の周波数を漸次連続的に制御する。受波器5は、周波数帯の異なる2つの無指向性受波器で構成される。乗算器9は、各周波数帯別の信号を乗算する。帯域制限器10は、乗算器9出力の高域信号を出力する。FFT11は、帯域制限器10出力より周波数成分を分別する。目標検出部12は、受信信号のレベルに応じて、色もしくは濃淡情報に変換し、分別された各周波数成分に対応する送信ビーム方向を基に画像を生成する。
(もっと読む)
1 - 19 / 19
[ Back to top ]