
Fターム[5J083CA09]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 送受波器(センサ) (1,888) | 受波器のみ (84) | 水中聴音器 (17) | ハイドロホン (12)
Fターム[5J083CA09]に分類される特許
1 - 12 / 12
対象位置検出装置及び対象位置検出方法
【課題】雑音の影響を低減して対象の位置を検出できる対象位置検出装置を提供する。
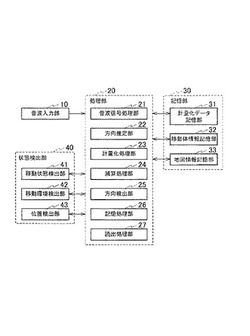
【解決手段】定常的な雑音及び周囲に存在する対象から発生する対象発生音を含む音波を入力する音波入力部10と、単位時間毎の音波に基づいて対象の方向を示す複数の方向推定値を算出する方向推定部22と、方向推定値を方向毎に計量化することにより、第1計量化データを作成する計量化処理部23と、定常的な雑音に基づく方向推定値が方向毎に計量化されたデータとして、第2計量化データを記憶する計量化データ記憶部31と、第1計量化データから、第2計量化データを減算することにより、対象発生音に基づく方向推定値が方向毎に計量化されたデータとして、第3計量化データを作成する減算処理部24と、第3計量化データから対象の方向を検出する方向検出部25とを備える。
(もっと読む)
向上したフォトニック結晶構造センサ

【課題】音響センサおよび音響センサの製造方法を提供する。
【解決手段】音響センサは、少なくとも1つのフォトニック結晶構造と、この少なくとも1つのフォトニック結晶構造に光学的に結合された端部を有する光ファイバとを含む。音響センサはさらに、上記少なくとも1つのフォトニック結晶構造および光ファイバに機械的に結合された構造部分を含む。上記少なくとも1つのフォトニック結晶構造、光ファイバおよび構造部分は、音響センサの周波数応答が音響周波数の範囲内で全体的に平坦となるように、ある体積を有する領域と実質的に境をなす。
(もっと読む)
ビーム合成装置、ビーム合成方法及び円筒アレイ受信システム
【課題】広帯域信号に対するビーム合成を可及的に少ないハイドロフォン数で実現しつつ、高い周波数におけるグレーティングローブを低減させる。
【解決手段】受信周波数帯域の一番低い周波数にて所定のビーム幅を得る開口長で、かつ、受信周波数帯域の一番高い周波数よりも低い周波数の1/2波長の間隔で配列された複数のハイドロフォン1(1)〜1(n)からなるアレイと、各ハイドロフォン出力を所定の分解能で周波数分析するFFT2(1)〜2(n)と、所定の分解能で分割された周波数毎にビーム形成を行う整相処理手段3(1)〜3(k)と、周波数毎に形成されたビームを合成する合成処理手段4とを備える。
(もっと読む)
整相システム、整相装置及び整相プログラム
【課題】変形したえい航型ラインアレイの形状を推定することができ、推定したえい航型ラインアレイの形状から指向性を補償した整相処理を行なうことができるようにする。
【解決手段】本発明の整相システムは、複数の受波器及びセンサを備えるラインアレイと、整相装置とを備え、整相装置が、センサからのセンサ情報及びえい航体の方位情報に基づいて、ラインアレイ上の複数の疑似的な位置から出力されたとみなす複数の疑似センサ出力情報を生成する疑似出力生成手段と、複数の疑似センサ出力情報及び複数の疑似的な位置に基づきラインアレイの形状を推定し、この推定したラインアレイ上での複数の受波器の位置を求めるラインアレイ形状推定手段と、複数の受波器からの受波信号に対して、ラインアレイ形状推定手段により求められた対応する受波器の位置で音波を受波したときの遅延時間を付与して受波信号の位相を整相する整相処理手段とを有する。
(もっと読む)
カーディオイドハイドロホンとそれを用いたハイドロホン装置
【課題】小型軽量で単一球形によってカーディオイド指向性を三軸の各方向に形成することを可能とする。
【解決手段】中空な球形圧電子に、音響整合レジン製の貫通軸が、球形圧電子の中心を通り両端が球形圧電子の外殻を貫通突出して配置固定され、球形圧電子の中心を座標軸の原点とし各軸が直交するXYZ座標系のX,Y及びZとなる仮想軸線のうちいずれかの軸線を貫通軸の軸線に対して直交配置し、且つ他の2軸を貫通軸からそれぞれ等距離となる位置として球形圧電子の外殻にそれぞれ対向する如く一対ずつに円形の切欠部を貫通形成し、各切欠部に円形圧電子が嵌め込まれて球形圧電子に接合係着され、各円形圧電子が球形圧電子の中心に対して等間隔な6方向とされてなり、これら3組の円形圧電子にてカーディオイド指向性をX,Y,Zの三軸方向に得る。
(もっと読む)
船舶推進音検出装置、船舶推進音検出方法、及び船舶推進音検出用プログラム
【課題】推進音が小さくても船舶から放出される船舶推進音を有効に検出することを可能とした船舶推進音検出装置等を提供すること。
【解決手段】到来する前記水中音波を音波信号として受信する水中音波受信器103と、この受信された音波信号をA/D変換するA/D変換器4と、このA/D変換された音波信号を周波数分析し且つ想定される船舶推進音の周波数帯で音圧レベルが周期的に変化する音圧波形データを周波数毎に抽出する船舶推進音抽出手段5とを有する。更に、この抽出された音圧波形データの音圧レベルの周期的変化率を周波数成分毎に算出する周期的変化率算出手段6と、この算出された音圧レベルの周期的変化率(周波数成分ごとの音圧変化率)の周期を周波数成分毎に前記船舶推進音の周期として特定する変動周期特定手段7とを備えたこと。
(もっと読む)
シーアンカーの収納構造
【課題】シーアンカーの水中での展張を安定的に行うことを可能とするとともに、展張後に不要となるケースを展張後に分離させて、構成として残さないようにすることが可能なシーアンカーの収納構造を提供する。
【解決手段】シーアンカー1を収納する収納空間を有する半割のケース10を備え、ケース10を構成する2つのケース本体11、12のそれぞれの内面側に、シーアンカー1を載置する載置面11a,12aを設け、各載置面11a,12aは、互いに係合してケース本体11、12同士を係止するための係合部を有し、水中に投下された際に作用する外力によりシーアンカー1が回転すると、その回転力が載置面11a,12aに作用して係合部の係合が外れ、ケース10が解体するものである。
(もっと読む)
広帯域信号処理システム、方法及びプログラム
【課題】 周波数帯域毎の方位ピーク周囲の情報を累加した結果の精度を向上させることができる、SPED処理を適用した広帯域信号処理システムを提供する。
【解決手段】 本発明は、直線又は円弧上の複数のセンサで構成されるセンサアレイで受信した受信信号を処理する広帯域信号処理システムに関する。そして、受信信号を複数の周波数帯域に分割し、各周波数帯域について、複数の異なる方位に対する整相出力を得る整相手段と、各周波数帯域についての整相出力における方位ピーク及びピークレベルを検出し、検出した方位ピークを、予め定められている分布形状に従った、しかも、検出されたピークレベルを重みとして適用した分布密度であるカーネル密度に変換する信号成分カーネル密度変換手段と、変換によって得られたカーネル密度を、方位毎に、複数の周波数帯域について累加する帯域累加手段とを有することを特徴とする。
(もっと読む)
音響装置及び音響装置における音響素子収納方法
【課題】アーム部材の数を増やすことなく、周方向に配列される音響素子の数を増加させて、周方向の指向性を向上させるとともに、非使用時には、複数の音響素子を装置本体の外周面に密接状又は近接状に沿わせて収納する。
【解決手段】複数の音響素子3を、装置本体2を中心とする円周上に展開配置した状態で使用し、非使用時には、複数の音響素子3を装置本体2の外周面に沿わせて収納する音響装置1Aであって、円周上で複数の音響素子3を支持する環状音響素子配列部4を、それぞれが複数の音響素子3を支持する複数の円弧状音響素子配列部5に分け、非使用時には、円弧状音響素子配列部5を、その内周が装置本体2の外周に沿うように、装置本体2に対して傾斜させた状態で収納する。
(もっと読む)
水中測位システムおよび水中測位方法
【課題】SBL方式の双曲線航法で測位対象物の測位を精度良く行う。
【解決手段】測位対象物に設けられたピンガ5から発せられた音響信号を含む音響信号をハイドロフォン1〜4で受信してAD変換器10でデジタル信号に変換(入力信号)する。入力信号は直交検波、デシメーション、帯域制限の各処理が施される。信号検出部20は、各処理の施された入力信号にピンガ5から発信された音響信号に対応するデジタル信号が含まれるか否かを検出する。これが検出された場合に、到達時間差算出部24が、相異なる入力信号間でラグ値ごとに相関関数演算を行い、この演算結果のピーク値を与えたラグ値から、相異なる2個のハイドロフォンによって受信したピンガ5からの音響信号の到達時間差を求める。この到達時間差を用いてピンガの位置が特定される。
(もっと読む)
追尾処理装置及びその方法並びにプログラム
【課題】 追尾フィルタに入力する追尾信号を有効に活用し、また各センサに対する時刻毎のそれぞれの潮流の影響を考慮して目標状態量の推定を精度良く行う。
【解決手段】 追尾信号として実際には存在しない遅延時刻(t−1)から現在時刻tまでの追尾信号、すなわち周波数情報f3(t−1),f3(t),f2(t)を、予測追尾信号外挿処理6において目標の状態量から予測し、この予測した周波数情報を新たな周波数情報として追尾フィルタ3に供給することにより、現在時刻tにおける周波数情報を得る。また、浮遊するGPS搭載のセンサから時々刻々の各センサ位置を正確に入手し、センサ毎、時刻毎の潮流情報u3(t−1),u3(t),u2(t)を周波数情報に加えて追尾信号として追尾処理を行う。時間遅延に対して追尾信号を予測する際、目標の状態量に加え、得られた各センサの潮流情報を含めて、周波数情報を算出する。
(もっと読む)
小型ステレオ超音波受信装置及びそれを用いた水中物体の位置測定方法
【課題】小型で軽量の超音波受信装置、特に水中を遊泳する動物に直接装着することが可能な小型で軽量の超音波受信装置を提供すること。
【解決手段】CPU、帯域通過フィルタ、アナログデジタル変換器、メモリからなる回路、及び駆動用電池を防水ケース内に収納し、2個のハイドロホンを前記防水ケース内のCPUと接続し、前記メモリの一部に格納したプログラムソフトにより前記2個のハイドロホンで受信した音声信号を前記CPUで処理し、その振幅と時刻をメモリに記録するよう構成する。
(もっと読む)
1 - 12 / 12
[ Back to top ]