
Fターム[5J084AA06]の内容
光レーダ方式及びその細部 (24,468) | 測定内容 (2,871) | 距離 (1,344) | 変位、厚さ、深さ (53)
Fターム[5J084AA06]に分類される特許
1 - 20 / 53
赤外線センサを用いた運転者状態監視装置及びその方法
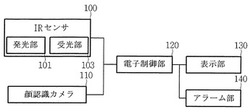
【課題】赤外線LED及びカメラを用いて運転者状態を確認することにより、カメラ又は運転姿勢に従い発生することのある認識誤謬を低減できる運転者状態監視装置を提供する。
【解決手段】光信号を発光する発光部101及び前記光信号を受光する受光部103を含み、発光部101から発光される光信号と、受光部103により受光される光信号の位相差を用いて、正面の運転者までの距離を測定する赤外線センサ100、運転者の顔を撮影し、撮影された映像で運転者の顔を検出する顔認識カメラ110、及び赤外線センサ100及び顔認識カメラ110を介して測定されたデータを用いて認識誤謬が発生したのかの可否を判別し、認識誤謬が発生した場合、発生した認識誤謬を分析する電子制御部120を含み、運転者が正常状態か、不注意、眠気などの不注意状態かを確認する。
(もっと読む)
移動体の障害認識方法及び障害認識システム

【課題】精度良く障害を認識することができる移動体の障害認識方法を提供する。
【解決手段】本発明の一形態に係る移動体の障害認識方法は、移動体の障害認識方法であって、移動体の路面データ取得手段で少なくとも高さデータを含む路面データを取得するステップと、取得した路面データを高さ順に並べ替えるステップと、並べ替えた路面データの変化点を抽出するステップと、変化点を境に障害を認識するステップと、を備える。これにより、精度良く障害を認識することができる
(もっと読む)
形質計測装置及び形質計測システム
【課題】映像情報を用いることなく、形状データに基づくルゴシティを得ることで、水中の形質を簡単に把握することができる形質計測装置を提供する。
【解決手段】レーザ発振器15によって水中の測定領域に向けてレーザ光を射出する。光センサ19によって測定領域に照射されたレーザ光の散乱光を反射光として検出する。演算用PC11によって反射光に基づいて測定領域の形状データを計測し、計測した形状データに基づいて、測定領域の面積と表面積との関係をルゴシティとして算出し、算出したルゴシティに基づいて測定領域の形質を判定する。
(もっと読む)
ドップラーライダ装置
【課題】ファイバ増幅器を備えたドップラーライダ装置では、光ファイバ増幅器の内部での偏波変動の影響を最小化するため、偏波制御をおこなっていた。
【解決手段】レーザ光を発振する基準光源1からのレーザ光を光分波回路2で送信信号光と局部発振光に分波し、光分波回路2で分波した送信信号光を偏波保持特性を有した光ファイバ増幅器4で増幅して大気中に発射する。大気中での散乱光を受信光として受光し、この受信光と光分波回路2で分波された局部発振光とを光受信回路7で合波し、受信光の局部発振光からの変動成分を電気信号として取り出すことにより、偏波制御を必要としないドップラーライダ装置を得る。
(もっと読む)
受光レンズ、および光学式変位センサ
【課題】光学式変位センサに用いられた際に、測定性能を向上すると共に、小型化して、安価に製造可能な受光レンズを提供することである。
【解決手段】受光レンズ14は、測定対象物に対して光を照射する投光モジュールと、投光モジュールからの光による測定対象物からの反射光を受光する受光素子とを備える光学式変位センサに用いられる。受光レンズ14は、測定対象物と受光素子との間に位置して、反射光を受光素子に結像するものであり、レンズ本体40と、レンズ本体40の反射光が入射する側の表面40aに形成され、レンズ本体40と屈折率の異なる樹脂で形成される樹脂層41とを含む。
(もっと読む)
変位センサ
【課題】測定部位毎の態様が急変しても、安定して適切な測定を行うことができる変位センサを提供する。
【解決手段】フィードバック回数設定部19及び制御部16にて1出力周期において複数回の調整の設定がなされると、制御部16はその最後のフィードバック調整後の測定値信号の出力を行い、受光信号が安定するまでの過渡期における測定値の排除が行われる。
(もっと読む)
深さセンサーの深さ推定方法及びその記録媒体
【課題】対象物体までの深さ計算時に漏れたフレーム信号によるエラーを補償することができる深さセンサーを利用した深さ推定方法を提供する。
【解決手段】光信号を対象物体に放射する段階と、対象物体から反射される光信号及び深さピクセルに印加され一定の位相差で周期的に印加される複数のゲート信号に基づいて複数のフレーム信号を発生させ、複数のフレーム信号及び複数のフレーム信号のそれぞれのフレーム情報を対象物体までの深さ推定のために提供する段階と、複数の提供されたフレーム信号のうちから漏れたフレーム信号の有無及び複数の提供されたフレーム信号の連続パターンを考慮して、複数の提供されたフレーム信号をそれぞれがエラーなしに、対象物体までの深さの推定に利用される複数のフレーム信号グループにグループ化する段階と、複数のフレーム信号グループのそれぞれを用いて、前記対象物体までの深さを推定する段階とを有する。
(もっと読む)
積雪深計測システム
【課題】本発明は、高い精度で計測でき且つ安全性の向上が図られ、積雪深の測定
結果を階的に警報出力できるものである。
【解決手段】
本発明は図1に示すように、積雪の表面に向けたスキャナより、レーザ光線を発光
させ、扇状に往復走査し、雪による反射光がスキャナに戻り受光するまでの位相差を
検出して距離を測定し、その距離データを送信するセンサー部と、前記センサー
部から受信した距離データを積雪深データに変える演算手段と、積雪深データを
出力する機能と、予め積雪深データの設定値を信号出力する機能を持つ処理部
からなる積雪深計測システム。
(もっと読む)
振動振幅計測装置および振動振幅計測方法
【課題】物体の振動振幅を精度良く求める。
【解決手段】振動振幅計測装置は、物体12にレーザ光を放射する半導体レーザ1と、発振波長が増加する期間と発振波長が減少する期間とが交互に存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光と物体12からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力信号に含まれる干渉波形を数える計数部7と、計数結果に基づいて物体12の振動の最大速度を算出する振動最大速度算出部8と、計数結果に基づいて物体12の振動周波数を算出する振動周波数算出部9と、振動最大速度と振動周波数とから物体12の振動振幅を算出する振動振幅算出部10とを備える。
(もっと読む)
測距方法及びレーザ測距装置
【課題】レーザ光の特徴である可干渉性を利用するとともに、被測定物の2つの測定点間の厚み方向の距離を高精度に測定する測距方法及びレーザ測距装置を提供することを目的とする。
【解決手段】本発明に係る測距方法及レーザ測距装置によれば、測定光を第1測定光と第2測定光とに分割し、第1測定光を被測定物6の第1測定点S1に照射した上で、第1測定光と参照光との光路長が等しくなる反射点の位置を取得する。また、第2測定光を被測定物6の第2測定点S2に照射した上で、第2測定光と参照光との光路長が等しくなる反射点の位置を取得する。そして、これらの位置に基づいて第1測定点S1と第2測定点S2間の厚み方向の距離を高精度に測定する。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の変位や速度を高い分解能で計測し、計測に要する時間を短縮する。
【解決手段】物理量センサは、物体10にレーザ光を放射する半導体レーザ1と、半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力信号に含まれる干渉波形の周期を計測する信号抽出部7と、信号抽出部7で計測された干渉波形の周期を、その直前と直後のうち少なくとも一方において計測された干渉波形の周期の移動平均値と比較することにより、干渉波形の周期を補正し、補正した個々の周期に基づいて物体10の変位と速度のうち少なくとも一方を算出する演算部8とを備える。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の変位や速度を高い分解能で計測する。
【解決手段】物理量センサは、半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するようにレーザ1を動作させるレーザドライバ4と、レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力に含まれる干渉波形の周期を計測する信号抽出部7と、信号抽出部7が計測した個々の周期の基準周期に対する変化量に基づいて物体10の変位と速度のうち少なくとも一方を算出すると共に、基準周期を補正する演算部8とを備える。
(もっと読む)
光学式変位センサシステム、コンソール、コントローラ、およびプログラム
【課題】光学式変位センサを用いて対象物までの距離を簡単に且つ精度良く測定する。
【解決手段】測定対象物に光を投光して、イメージセンサで反射光を受光し、各画素での受光信号出力値を取得する。表示画面上に受光信号出力波形を表示して、表示画面上での画素位置の範囲(有効画素範囲)を設定し、有効画素範囲内での最大受光信号出力値が所定の基準出力値と一致するように検出感度を変更する。そして得られた検出感度を用いて測定対象物の変位を測定する。こうすれば、たとえ測定しようとする箇所から十分な強度の反射光が受光できない場合でも、その箇所を含むように有効画素範囲を設定することで、適切な検出感度を用いて精度良く測定することが可能となる。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の変位や速度を高い分解能で計測し、計測に要する時間を短縮する。
【解決手段】物理量センサは、半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するようにレーザ1を動作させるレーザドライバ4と、レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力に含まれる干渉波形の周期を計測する信号抽出部7と、信号抽出部7が計測した個々の周期の基準周期に対する変化量に基づいて物体10の変位と速度のうち少なくとも一方を算出すると共に、周期の変化特性に応じて基準周期を補正する演算部8とを備える。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の変位や速度を高い分解能で計測し、計測に要する時間を短縮する。
【解決手段】物理量センサは、物体10にレーザ光を放射する半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力信号に含まれる干渉波形の周期を干渉波形が入力される度に計測する信号抽出部7と、信号抽出部7が計測した個々の周期に基づいて物体10の変位と速度のうち少なくとも一方を算出する演算部8とを備える。
(もっと読む)
距離計及び距離測定方法並びに光学的三次元形状測定機
【課題】 長い距離を高い精度でしかも短時間に測定することが可能な距離計および距離測定方法を提供する。
【解決手段】
第1の光源1から出射されて基準面4に照射される基準光S1と第2の光源2から出射されて測定面6に照射される測定光S2と干渉光S3を基準光検出器3により検出して得られる干渉信号と、上記基準面4により反射された基準光S1’と上記測定面5により反射された測定光S2’との干渉光S4を測定光検出器6により検出して得られる干渉信号を信号処理部7に供給して、上記信号処理部7により、上記干渉光S3を検出した干渉信号と上記干渉光S4を検出した干渉信号の時間差から、光速と測定波長における屈折率から上記基準面までの距離と上記測定面までの距離の差を求める。
(もっと読む)
レーザ干渉測長装置及びレーザ干渉測長方法
【課題】製造コストを抑制し且つ変調による影響を解消したレーザ干渉測長装置及びレーザ干渉測長方法を提供する。
【解決手段】レーザ干渉測長装置は、レーザ光の干渉に基づき測長を行う。レーザ干渉測長装置は、変調信号Sg2にて変調されたレーザ光L1を生成するレーザ光生成部10と、レーザ光生成部10からのレーザ光L1を移動鏡30に照射して測長情報を含んだ計測光L4を得ると共に計測光L4を参照光L2と干渉させて受光して測長情報を含んだ電気信号φA、φBを生成する干渉計測部20と、電気信号を所定周波数に同期するようにサンプリングしてサンプリング電気信号φA(n)、φB(n)を生成するサンプリング部40と、信号φA(n)、φB(n)に基づき測長情報を算出する変位算出部50と、変調信号Sg2に基づき、算出された測長情報に含まれる変調成分を除去する変調成分除去部60とを備える。
(もっと読む)
移動体位置測定装置、移動体位置測定方法、及び移動体位置測定プログラム
【課題】複数の装置を組み合わせて用いることなく、光学系による測定方法を工夫することにより飛翔体の位置測定精度を高めることができるようにする。
【解決手段】レーザ部1が2つの連続するレーザパルスを生成して発射すると、送信光学部2が送信レーザパルスP1を所定の時間間隔Δtでターゲット10へ送信する。受信光学部3が、ターゲット10で反射した受信レーザパルスP2を集光すると、多チャンネンル光検出部4が、受信レーザパルスP2を入射方向に対応するチャンネルごとに検出し、多チャンネル測距部5が送信レーザパルスP1の送信時刻と受信レーザパルスP2の受信時刻との時間差を測定する。そして、制御部8が、多チャンネル測距部5の測定した時間差によってターゲット10までの距離を算出すると共に、多チャンネンル光検出部4で検出されたチャンネルの位置からターゲット10の移動方向を算出する。
(もっと読む)
追尾式レーザ干渉計
【課題】簡単な構成で、基準球支持部に対する各種配線、光ファイバ等の接触による張力や摩擦力による影響を無くして、高精度な測定を可能とする。
【解決手段】測定の基準を成す基準球10と、該基準球を支持する基準球支持部12と、前記基準球の周囲を2軸回転運動する、第一軸回転機構21及び第二軸回転機構22でなる回転機構部20と、該回転機構部に搭載されたレーザ干渉測長機30を有し、ターゲットとなる再帰的反射体(40)からの戻り光の情報に基づきターゲットを追尾して、基準球の中心座標を基準とし、回転機構部に載ったレーザ干渉測長機からの出射光と戻り光の光軸が平行となる再帰的反射体との距離を測定する追尾式レーザ干渉計において、装置の基部(14)に設置される第一軸回転機構21の内周部を中空とし、該中空に、前記基準球支持部12との隙間を介して筒状カバー60を設け、その外部に第二軸回転機構22への配線を通過させる。
(もっと読む)
ホットスカーフ溶削量測定方法及び測定装置
【課題】本発明は、鋼片上下面それぞれの溶削量を測定できるホットスカーフ溶削量測定方法および装置の提供を目的とする。
【解決手段】本発明は、鋼片の溶削前に上下面の表面高さ分布を測定するとともに、溶削しない側面の特定部位の上下方向の位置を記憶し、鋼片の溶削後に再度上下面の表面高さ分布を測定するとともに、前記特定部位の上下方向の位置を記憶し、前記特定部位の位置について溶削前後の上下方向の移動量及び傾き量を求め、当該上下方向の移動量及び傾き量により前記特定部位の位置を溶削前の状態に修正することにより、前記溶削後の鋼片の上下面の表面高さ分布を溶削前の位置に修正し、当該修正した鋼片の上下面の表面高さ分布と前記溶削前の上下面の表面高さ分布との比較から鋼片の上下面の溶削量の分布を求めることを特徴とする。
(もっと読む)
1 - 20 / 53
[ Back to top ]