
Fターム[5J084AC07]の内容
光レーダ方式及びその細部 (24,468) | 装置の設置形態 (779) | ロボット、機械に設置するもの (126)
Fターム[5J084AC07]に分類される特許
121 - 126 / 126
自動ドア周辺を検出するレーザ監視及び感知装置

【課題】外部での適用例などに応用する際の使用に適した光スキャナ装置を提供すること、また、長い使用期間にわたって適切な動作が確保される光スキャナ装置を提供することにある。
【解決手段】目標物体(56)の距離範囲及び角方向を計測するための光スキャナ装置(10)であって、光パルスを送信するようになされたパルス源(12)と、この送信光パルスを反射し且つ可変掃引方向に掃引面(15)内部の掃引区域を横切って掃引するようになされた送信偏向手段(20)と、掃引面(15)内で反射された受信光パルスを検出するようになされた光検出手段(42)と、掃引面(15)内で反射された光パルスを反射し且つ反射された光パルスを光検出手段(42)に再誘導するようになされた受信偏向手段(24)と、光遮断手段(32)を備える。
(もっと読む)
3次元画像システムにおける範囲または距離またはレインジ(range)の決定

対象物の画像化のシステムと方法。
検出器アレイの画像が画像面に配設される。検出器の各アレイは内挿部を有しているタイミング回路に接続され内装器はそれが放電する時とは異なった速度で第1のキャパシタを充電する第1の回路を含む。光パルスは対処物の方に送られるので光パルスの一部分は反射パルスとして対象物から反射され光パルスがいつ対象物へ送られたかを示す第1の値が記録される。反射されたパルスは1またはそれ以上の検出器で検出されそのパルスのパルス特性とその反射パルスが検出器にいつ到達したかを表わす第2の値とが記録される。対象物との範囲はその後第1及び第2の値と反射されたパルス特性の関数として計算される。
(もっと読む)
係留ロボット用レーザー走査機
船舶の輪郭上の目標位置の位置決めを行うための輪郭走査機であって、上記輪郭走査機は、上記船舶に向けて、徐々にあるいは即時に放射するために適用される放射機と、そこに入射する放射を示す信号を提供する受信機と、上記放射機を活動させ、上記信号を受信する格納された命令を含み、走査機の上記目標位置の垂直位置を決定する制御装置または処理装置とを備える。  (もっと読む)
(もっと読む)
面法線計測方法及びその装置
【課題】
離れた位置にある小領域対象面の面法線を計測する方法及び装置を提供する。
【解決手段】
互いの両端面を平行に組み合わせて中間に一定の隙間を有する2枚のウェッジプリズム11a、11bを用い、光ビームの入射光91を平行にシフトするためのビームシフト光学系1を構成し、これを角度可変アクチュエータ41により一体で回転させ照射位置を可変とし、小領域中の少なくとも3点94a、94b、94cに光ビームを照射して得られる距離データを基に法線演算回路51で法線を算出することにより、離れた位置にある対象面の面法線を計測する方法及びその装置を提供する。
(もっと読む)
サインに基づく人間−機械相互作用
コミュニケーションは、人間−ロボット相互作用における重要な問題である。サインは、ユーザの命令又はコマンドを提供することにより機械との相互作用に用いられる。本発明の一実施形態は、人間の検出、人間のボディパーツ検出、手形状分析、軌道分析、向き決定、ジェスチャマッチング等を含む。形状及びジェスチャの多くの型が、コンピュータビジョンに基づく煩わしくない様式で認識される。多くのアプリケーションが、家電の遠隔制御、コンピュータ制御装置のマウスレス(及びタッチレス)操作、ゲーミング及び他方に命令を与えるための人間−ロボットコミュニケーションを含むこのサイン理解技術により実現可能となる。動的な検出ハードウェアが、ビデオレートでの深度画像のストリームを取得するために用いられ、深度画像のストリームは、情報抽出のために順次分析される。 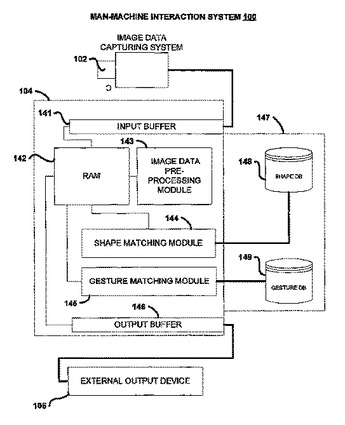 (もっと読む)
(もっと読む)
移動制御システム
本発明は、車両またはロボットアームなど移動プラットフォームの制御に使用できる移動制御システムに関する。本発明は特に車両用の運転支援、車両用のセルフパーキング支援システムに利用できる。3次元カメラ(12)がプラットフォーム、例えば車(102)上に置かれ、プラットフォームまわりの環境を撮像する(114)ように配置される。プロセッサ(7)が3次元情報を用いて環境モデルを生成し、このモデルを利用して移動制御信号を生成する。好ましくは、プラットフォームは環境に対して移動し、様々な位置からの環境の複数の画像を取得する。 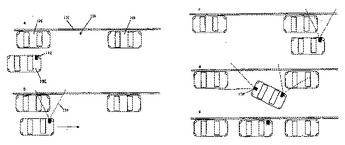 (もっと読む)
(もっと読む)
121 - 126 / 126
[ Back to top ]