
Fターム[5J084AC07]の内容
光レーダ方式及びその細部 (24,468) | 装置の設置形態 (779) | ロボット、機械に設置するもの (126)
Fターム[5J084AC07]に分類される特許
101 - 120 / 126
光伝搬時間の測定方法

【課題】とりわけカメラの場合により都合のよい構成要素及びより低周波数の増幅器によっても作動可能な光伝搬時間測定のための方法の提供。
【解決手段】とりわけカメラ(10)のための光伝搬時間測定方法であって、以下の工程、即ち、第1のクロック制御器(16)によってクロック制御される第1の光信号を、少なくとも1つの光送信器(12)から光チャンネル(14)に送信し、反射性対象物(O)を介してフォトダイオード(13)に至らしめる工程、前記受信器(13)において前記第1の光信号の結果としての受信信号を検出する工程、更なる(第2の)クロック制御器(17)によってクロック制御される更なる(第2の)光信号を、前記第1の光信号に対し所定の角度で前記フォトダイオード(13)に入射し、該第1の光信号と混合して共通の受信信号(S13)を生成する工程、その周波数応答がクロック差の周波数に相当するフィルタ(25)によって共通の受信信号(S13)をフィルタ処理し、フィルタ信号を生成する工程、光チャンネル(14)からの前記共通の受信信号を用いて伝搬時間を求める工程、ミキシング装置(30)において前記第1のクロック制御器(16)のクロック信号と前記更なる(第2の)クロック制御器(17)のクロック信号とを混合し同様に混合信号を生成する工程、及び両クロック制御器(16,17)の前記混合信号と前記フィルタ信号との間の位相シフトを用いて、前記光伝搬時間を求める工程を有する。
(もっと読む)
バーコード・スキャナによる移動するアイテムの方向を追跡するための方法および装置

【課題】レーザ・バーコード・スキャナによる移動するアイテムの方向を追跡するための方法、コンピュータ読み取り可能媒体および装置を提供する。
【解決手段】一対の走査面による移動するアイテムの包装グラフィックスから反射するビデオ遷移を感知するステップと、一対の走査面の各走査面が感知したビデオ遷移の数をカウントするステップと、一対の走査面の各走査面のビデオ遷移のカウントした数を、第1のサンプルのところの所定の閾値と比較することにより、移動するアイテムが各走査面と交差したかどうかを判定するステップとを含む。時間的に第2のサンプルのところで、上記ステップが反復され、この方法は、第1のサンプルおよび第2のサンプルから観察した変化から移動するアイテムの移動方向を評価する追加ステップを含む。
(もっと読む)
被測定物検出装置
【課題】電磁波を周囲空間に走査することによって形成される平面状の走査領域の形態を、容易に変更可能な被測定物検出装置を提供する。
【解決手段】電磁波を周囲空間に走査して平面状の走査領域を形成し、走査領域内で反射して戻ってきた電磁波に基づいて走査領域内に存する被測定物を検出する被測定物検出装置本体2の周囲空間に、電磁波を反射して走査領域の形態を変更する反射部3を配置した。
(もっと読む)
物体検出ユニット、物体検出装置、横断路の移動物体検知装置及びプログラム
【課題】表面が滑らかで光沢のある黒い物体などレーザ光線の反射率が低い物体の位置、形状を正確に検出する物体検出ユニットを提供する。
【解決手段】物体検出部20a〜20dが読み出された固定物体の位置データ中から距離の測定値を示す信号のあるレーザ光線の照射角度ごとに、そのレーザ光線の照射角度に対応する監視領域内に存在する物体の位置データ中から受光なしを示す信号のあるレーザ光線の照射角度を抽出する(S125)。そして、抽出されたレーザ光線の照射角度がある場合には、物体検出部20a〜20dがそのレーザ光線の照射角度の位置には、レーザ光線を反射しない移動物体が存在すると判断する。一方、抽出されたレーザ光線の照射角度がない場合には、物体検出部20a〜20dが監視領域内にレーザ光線を反射しない移動物体が存在しない、と判断する(S130)。
(もっと読む)
検出センサ
【課題】比較的簡単な構成で、移動する物体を測定することが可能な検出センサを提供することを目的とする。
【解決手段】光電センサ30は、投光部31、受光部33、データ処理部40、出力回路51、出力回路制御部55などから構成され、移動するワークWに向けて、投光・受光動作を行なって、ワークWの位置を検出する。受光部33から出力される受光信号Cnはデータ処理部40に入力される。データ処理部40は第一データ処理部45、第二データ処理部47などから構成される。ワークが測定エリアになく測定が正しく行なわれていない場合には、受光信号Cnの変化が大きく現れるが、この変化を、第二データ処理部47で監視することで、ワークWが測定エリアから外れている場合には、出力回路51の出力動作を停止させる。これにより、ワークWが測定エリアから外れた状態で測定された測定結果が、外部に出力されることがない。
(もっと読む)
自己混合レーザを用いる三次元計測内視鏡
【課題】これまでの内視鏡において対象物までの距離を測るには対象物にスポット光を照射し、三角法に基づいて距離を求めていたが、基線長が短く精度に問題があった。また自己混合半導体レーザによれば近距離でも精度よく距離が測れるが、多点における計測が困難であった。
【解決手段】自己混合半導体レーザの発光部を光軸と直交する方向に変位させて、レーザ光の方向を変えることにより対象物表面を走査する。または中間部に光ファイバーを介在させ、光ファイバーの端部を光軸と直交する方向に変位させて、レーザ光の方向を変える。さらにはレーザの発光部を2次元に配列し、時分割駆動することにより対象物表面を走査する。
(もっと読む)
移動ロボットの距離および位置検出装置
【課題】光を用いた2つの方法により周囲距離および自己位置検出をより正確に行う。
【解決手段】移動ロボット1が光ビーコン3の光信号の規定領域BAに入っていないときには、ジャイロセンサ16の出力する角速度を積分して求めた方位角及びステッピングモータ12の駆動用パルスの計数値に対応する移動距離に基づいて移動ロボット1の位置を求めているので、如何なる位置でも求めることができる。また、移動ロボット1が光信号の規定領域BAに入っているときには、光信号による三角測量を行って、光ビーコン3からの移動距離LBを求め、この移動距離LB及び規定領域BAに基づいて移動ロボット1の位置を高精度で求めて更新する。移動ロボット1が光ビーコン3の光信号の規定領域BAに入っていないときには、光信号による三角測量を行って、周囲距離を測定する。
(もっと読む)
光伝搬時間の測定方法
【課題】 比較的有利な構成要素と、より低い周波数の増幅器により動作できる光伝搬時間の測定方法。
【解決手段】 カメラ等のための光伝搬時間測定方法(装置)では、クロック制御部(11)によりクロッキングされる第1の光信号が少なくとも1つの送信器(12)から少なくとも1つの光区間(14)へ、反射性対象物(O)を介して少なくとも1つの受信器(13)に送信され、前記受信器は、前記対象物(O)の接近、滞留(停止)および/または離隔により変化した前記第1の光信号を検出する。受信器では、第1の光信号の結果である、光区間からの受信信号が検出され、伝搬時間を検出するために、クロック制御部(11)によりクロッキングされた第2の信号と比較器(15)でクロック毎に比較される。この第2の信号は光区間(14)なしで生じる信号である。そして前記比較器(15)の出力端に比較値を形成するために、この比較器は、送信信号および/または第2の信号の振幅値を制御するために使用され、前記受信信号と前記第2の信号が少なくとも前記比較器の入力端で実質的に同じ大きさであるようにする。平行して、クロック変化の際に発生し、光伝搬時間に相応する、光区間(14)からの前記受信信号と前記第2の信号との間のクロック変化信号(TW)がクロックに従って検出される。ここで前記光区間(14)からの前記受信信号と前記第2の信号は前記比較器(15)の入力端において実質的に同じ大きさに制御される。前記受信信号と前記第2の信号との間のクロック変化信号(TW)をその振幅に従い、別の比較器(16)で比較することによって差値(S16)が検出される。この差値(S16)が最小に、有利にはゼロになるまで、位相シフタ(17)によって受信信号と第2の信号の位相の位相遅延が変化される。差値が最小であるときに発生した位相シフタの遅延は光伝搬時間の検出に使用される。これによって光伝搬時間の測定方法が得られる。  (もっと読む)
(もっと読む)
距離測定による通過方向判別装置
【課題】本発明による距離測定による通過方向判別装置の課題は、複数の通過体が重複して通過する場合においても、個々を区別した状態で通過体の通過方向を検知することが可能なものを提供することにある。
【解決手段】検出信号を発生する検出信号発生器と通過体による前記検出信号の反射信号を受信する受信器との対からなる複数個の検出ユニット、又は、検出信号を発生する1個の検出信号発生器と前記検出信号発生器を共用し、通過体による前記検出信号の反射信号を受信する複数の受信器による複数個の検出ユニットと、距離差計算器と、応答順判定器と、方向及び個判定器とを有することを特徴としている。
(もっと読む)
検知装置
【課題】領域内において検知した物体が障害物であるか否かを短時間で精度よく判断でき、かつ設備費用を削減できる検知装置及び検知方法を提供する。
【解決手段】検知装置は、所定の領域を走査するレーザレーダ10と、このレーザレーダ10により検知される距離情報とその走査方向の情報とから3次元レーダ情報を求めるレーダ情報作成手段21と、3次元レーダ情報から所定の領域内に存在する物体を検知する物体検知手段22と、所定の領域を、物体の進行方向に対して複数に分割された分割領域として認識する領域認識手段23と、分割領域の1つに所定時間継続して少なくとも1つの物体が滞留したときに、障害物が滞留していると判断する障害物判断手段24とを備えたことを特徴とする。
(もっと読む)
人間検知器
【課題】 連続して利用者を追尾できる自動改札機用人間検知器を提供する。
【解決手段】 光線(ビーム光線)を発生させる発光器と、光線を受光する受光器と、自動改札機の本体の上方の所定位置に設けられた反射鏡と、発光器から照射された光線を前記反射鏡に向くように反射させるとともに、その反射鏡から照射されてくる光線を受光器に向くように反射させるガルバノミラーと、発光器からガルバノミラー及び反射鏡を介して照射されてきた光線を自動改札機の本体の改札通路を走査するようにそのガルバノミラーを駆動制御するガルバノミラー制御手段と、発光器から照射された光線が自動改札機の本体の改札通路内で反射されて受光器に到達するまでの時間に基づいてその改札通路内の利用者を検知する検知手段とを有する。
(もっと読む)
板速度計
【課題】パージエアによる騒音を大幅に抑制し、圧縮空気の消費量を抑制しつつ、鋼板速度が速い場合にも遅い場合にも常に正確な速度測定が可能な板速度計を提供する。
【解決手段】パージエアが供給されるハウジング1の内部にレーザ速度計2を収納し、ハウジング1の端部に設けたパージノズル4の内部から板の表面にレーザ光線を照射する板速度計の改良であって、パージノズル4をテーパ部5を備えた先細とするとともに、パージノズル4の外側にサイドパージノズルを7を設け、中心部よりも外側位置における板表面上のパージエア面圧を確保する。これにより騒音が大幅に低減し、また鋼板表面のクーラント液を確実に排除して精度の高い速度測定ができる。
(もっと読む)
走行ロボットの位置感知装置及びこれを備えたロボット掃除機
【課題】走行ロボットの位置感知装置に係り、特に、走行における障害物との距離を感知する上で、外部の妨害光線が障害物として誤認されることを防止しうる走行ロボットの位置感知装置及びこれを備えたロボット掃除機を提供する。
【解決手段】走行ロボットの位置感知装置は、光を反射させた障害物との距離に従って異なる位置に光を結像させるように構成された受光素子と、障害物から反射されて前記受光素子に入射する光を、直進するように放出させ、前記受光素子に入射される外部の妨害光線による虚像の障害物が前記有効感知範囲外に位置するようにその妨害光線に対して角度を与えて光を放出する発光素子と、前記受光素子に入射した光の結像位置から前記障害物との距離を演算する信号処理装置と、前記位置感知装置で感知された距離の走行時変化を考慮してその距離に障害物が存在するかを判断する誤信号処理装置と、を備える。
(もっと読む)
自律走行車及びその制御方法
【課題】現場に固定された検出対象物を検出することにより基準方位を読み取ってジャイロセンサの基準方位の設定を行う自律走行車において、検出対象物の設置を容易にし、正確な走行制御を行う。
【解決手段】現場に仮想として配置されるXY座標上の点として特定されている2点以上の位置にそれぞれ固定された検出対象物(リフレクタR1〜R4)をレーザ・スキャナ44によって検出して得られた情報に基づき、XY座標上の自車の方向αを算出する。これを走行ルート始点5等において行い、自車の方向αに基づきジャイロセンサの基準方位を設定する。ジャイロセンサの検出信号に基づき走行ルート4に沿った走行を制御し、リフレクタの設置数は極力少数に抑えた。
(もっと読む)
自走式掃除機
【課題】高価な障害物センサを用いることなく、掃除されない範囲を小さくすることのできる自走式掃除機を提供する。
【解決手段】自走式掃除機の赤外線センサ11から障害物100までの距離が短くなっていくときに、フォトトランジスタ52で受光される障害物100からの反射光の受光量が限界距離を境として増加から減少に転じるように、LED51とフォトトランジスタ52とが配置され、且つ反射光を遮る遮光筒57がフォトトランジスタ52に取り付けられている。掃除機を制御するマイコンは、フォトトランジスタ52の出力レベルが増加から減少に転じたことを検出した後に掃除機の移動を停止するなどの措置をとる。この限界距離が短い距離(例えば1cm)となるように赤外線センサ11を構成することにより、掃除されない範囲が小さくなる。
(もっと読む)
車両撮像カメラ
【課題】 車両をより確実に撮像すること。
【解決手段】 所定の車線6に進入する車両7の映像を撮像するカメラ5と、レーザが発射されてからレーザが車両7の表面で反射した反射光が受光されるまでの飛行時間に基づいて車両7の立体形状を示す距離画像を間欠的に生成するフラッシュレーザレーダ4と、その距離画像に基づいてカメラ5を制御する制御装置11とを備えていることが好ましい。
(もっと読む)
脱着容易なカバーを備えた光電センサボックス
【課題】 高いシール性を確保してケースを施蓋でき、かつ、ケースに対し、開閉自在で容易に脱着できるカバーを備えた光電センサボックスを提供する。
【解決手段】 左右寸法の小さい偏平なケース2に、これの上面を覆うカバー3を、回動による開閉が可能で、かつ、着脱可能に装着する。カバー3の後端面から後方への突出位置に設た支軸29の両端面に、外側方に進出した軸側進出面29aと、軸側進出面29aとの接続部から内側方へ向け後退する軸側傾斜面29bとを設ける。ケース3に、支軸29の両端部が嵌合する軸孔31を有する一対の受部30を設け、この両受部30の軸孔31の周囲の内側面に、内側方に進出した受側進出面30aと、受側進出面と30aから外側方へ向け後退する受側傾斜面30bとを設ける。一対の軸側進出面29a,29a間の寸法D1は、一対の受側進出面30a,30a間の寸法K2よりも大きく、かつ、一対の受側傾斜面30b,30b間の最大寸法K1よりも小さく設定する。
(もっと読む)
物体検知装置
素子の指向性にばらつきがあっても、全ての検知エリアを均一な感度で検知することができ、しかも誤動作の発生を少なくできる物体検知装置を提供する。検知線Pの投光素子(41)または受光素子(42)と、単一の前記素子(41),(42)に対して複数の検知エリア(S1)〜(S4)を形成するプリズム体(6)と、前記素子(41)または(42)とプリズム体(6)との間に配置されたレンズ体(5)とを備え、レンズ体(5)とプリズム体(6)との間で検知線(P1)をプリズム体(6)の稜線Lに沿って平行な方向に向けるように設定され、前記プリズム体(6)は、前記稜線Lで区画される複数のプリズム片(60)を有し、この各プリズム片(60)が前記複数の検知エリア(S1)〜(S4)のそれぞれを形成するプリズム小片(61)〜(64)を有している。  (もっと読む)
(もっと読む)
立体視装置およびそれを備えた立体画像表示システム
【課題】 超小型、かつ低消費電力、かつリアルタイム撮像が可能な立体視装置およびそれを備えた立体画像表示システムを提供する。
【解決手段】 この立体視装置では、超音波発生器4は、LFSR11からのPN符号に従って振幅変調された超音波を生成して対象物6に照射する。イメージセンサ14は、複数行複数列に配置され、各々が対象物6からの反射波を受け、受けた反射波を電気信号に変換する複数の単位キャパシタを含む。相関器15は、複数の単位キャパシタの各々によって生成された電気信号の位相とLFSR12からのPN符号の位相とを比較し、比較結果に応じて相関値DATAを出力する。これにより、対象物の三次元的な立体画像をリアルタイムに得ることができる。また、立体視装置内部に記憶回路やプロセッサが不要であるため、超小型で低消費電力の立体視装置が実現できる。
(もっと読む)
多次元計測システム
レーザを利用したトラッキングユニットは、ターゲットと通信してターゲットに関する位置情報を取得する。具体的には、ターゲットを計測対象点に配置する。次に、ターゲットのピッチ移動、ヨー移動およびロール移動、ならびにトラッキングユニットを基準としたターゲットの球座標を取得する。例えば、ターゲットは、遠隔制御ロボットなどの可動装置に組み込まれた能動素子であってもよい。 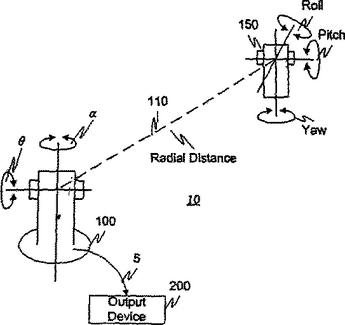 (もっと読む)
(もっと読む)
101 - 120 / 126
[ Back to top ]