
Fターム[5J084BA16]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 投光系に関するもの (2,428) | ビーム形状に関するもの (187) | 扇ビーム (16)
Fターム[5J084BA16]に分類される特許
1 - 16 / 16
計測システムおよび計測方法
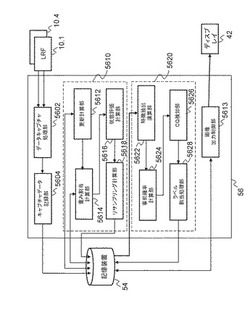
【課題】距離計測センサを用いて、観測領域内の移動対象を追跡しつつ、精度よく、対象を識別して分類することが可能な計測装置を提供する。
【解決手段】計測装置100は、対象までの水平方向の距離を計測可能に配置された複数のレーザレンジファインダ10.1〜10.4と、計測結果から、対象の位置および移動速度を推定する追跡モジュール5610と、計測結果に基づいて、対象の形状を表現する特徴ベクトルを算出する特徴抽出演算部5622と、特徴ベクトルに基づいて、対象が予め定められた分類の各クラスに属する確率を事前確率として算出する事前確率計算部5624と、対象が他の対象と同期して移動している同期状態であるかを判別し、算出された事前確率と、同期状態にある対象が各クラスに対応する尤度とに基づいて、対象が属するクラスを判別するラベル割当処理部5628とを含む。
(もっと読む)
車載レーダ装置

【課題】道路環境に適した検知が可能な車載レーダ装置を提供する。
【解決手段】車両が左側通行であることに基づいて生じる左右非対称な道路環境や、ドライバの習性に基づいて生じる左右非対称な死角範囲を考慮して、右方向の検知に用いる右照射光SRは長い検知距離を、左方向の検知に用いる左照射光SLは、広い検知範囲を確保できるように設定(αL>αR,γL>γR,βL>βR)する。これにより、交差点に進入した時に交差道路の手前側車線を右方向から自車両に向かって接近してくる車両を、早期に検知することができると共に、ドライバの注意が右側に偏ることによって左側から前方にかけて広がる死角中の物標を、的確に検知することができる。
(もっと読む)
レーザ画像計測装置
【課題】環境変化に左右されない正確な測距値を取得可能なレーザ画像計測装置を得る。
【解決手段】レーザ光の発振時間と反射光の受光時間との時間差に基づき対象物までの距離を導出するために、基準となる変調信号Mを生成する基準信号発生部20と、変調信号Mにより変調されたレーザ光を出射するレーザ光送信部30と、レーザ光を走査して整形された送信ビームLを出射するレーザ光走査部40と、反射光を受信信号に変換する受信部50と、レーザ光走査部40内のレーザ光走査光学系5から基準固定距離に設置されて送信ビームLが照射される基準反射板6と、受信信号から基準反射板6および対象物の距離値Dzを導出する信号処理部60と、を備える。レーザ光走査部40および受信部50は、基準反射板6からの反射光を、対象物に対する距離測定と同一の光路で送受信する。信号処理部60は、基準反射板6の距離変動量ΔDzから、対象物の距離値を補正する。
(もっと読む)
距離画像センサ
【課題】可動部がなく耐久性や信頼性が高く、広範囲の対象空間を設定することを可能にしながらも投光に要するエネルギーを低減可能な距離画像センサを提供する。
【解決手段】発光源1は、強度が時間経過に伴って変化する変調光を投光する。演算処理部7は、発光源1による投光から撮像素子2による受光までの時間差に相当する情報を変調光の時間変化と撮像素子2の各受光領域での受光強度とから抽出し、距離を画素の値とする距離画像を生成する。発光源1の前方には、屈折と反射との少なくとも一方を利用して発光源1からの変調光をスリット光として対象空間に投光する投光光学系3が配置される。また、撮像素子2の前方には、スリット光により物体表面に形成される投光パターンの像が撮像素子2の受光面のサイズに合わせて投影されるように屈折と反射との少なくとも一方を利用して当該像のアスペクト比を調節する受光光学系4が配置される。
(もっと読む)
追尾式レーザ干渉計および追尾式レーザ干渉計の復帰方法
【課題】レーザ光が遮断される等の理由により追尾できなくなったときに追尾を自動的に復帰可能とする、あるいは、測定開始時に初期調整作業の自動化を可能とする追尾式レーザ干渉計を提供する。
【解決手段】被測定体であるレトロリフレクタ300に向けて照射し、該レトロリフレクタ300によって戻り方向に反射されたレーザビーム102の干渉を利用してレトロリフレクタ300の変位を検出すると共に、前記レーザビーム102の光軸の位置の変化を用いて2軸回転機構240によりトラッキングを行うようにした追尾式レーザ干渉計において、前記レーザビーム102の光軸を含む扇形状であって、前記2軸回転機構のうち該扇形の中心軸と直交する軸の回転動作に連動可能な、扇状レーザ光602を出射する光照射体600と、前記レトロリフレクタ300又は光照射体600と特定の位置関係を有して、該扇状レーザ光を受光する受光体620と、を備える。
(もっと読む)
車両用空間計測装置
【課題】低コストで且つ計測精度が向上した車両用空間計測装置を提供すること。
【解決手段】車両に搭載され、自車両周辺の所定空間を空間計測する車両用空間計測装置が、自車両の前後方向後端部から略水平右方向及び略水平左方向へ向けて、略鉛直方向に縦長の楕円形断面を有するファンビーム形状のレーザパルス光を発射し、そのタイム・オブ・フライトを計測することによって自車両後方の左右領域に存在する周辺物体までの距離を測定する測距手段と、この測距手段により測定された上記周辺物体までの距離と、後輪の車輪速パルスの平均値と、ステアリングハンドル操舵角とから、自車両後方に存在する空間を計測する空間計測手段とを備える。
(もっと読む)
車両周辺監視装置
【課題】車両周辺の景色を撮像した画像と、車両周辺の障害物から車両までの距離又は障害物の速度とを表示部に重畳表示できる車両周辺監視装置であって、比較的小さい設置スペースで実現できる車両周辺監視装置を提供すること。
【解決手段】車両周辺の光を受光することで、車両周辺の景色を撮像する撮像部20と、車両周辺の障害物で反射されたレーザ光を受光することで、障害物から車両までの距離及び障害物の速度のうち少なくともいずれか1つを検知する障害物検知部10と、撮像部20により撮像された車両周辺の景色の画像に、障害物検知部10により検知された障害物から車両までの距離及び障害物の速度のうち少なくともいずれか1つを示す数字を合成した合成画像を表示する表示部30と、を備えたことを特徴とする。
(もっと読む)
ビーム照射装置
【課題】2軸駆動方式のビーム照射装置において、目標領域におけるビームの照射位置を、簡素な構成にて円滑に検出できるようにする。
【解決手段】ミラーホルダ10の支軸12の端部にレーザチップ50を配置し、レーザチップ50からのレーザ光を受光するPSD60をベース300側に配置する。こうすると、ミラー面の傾き状態がレーザ光の出射方向にダイレクトに反映される。よって、これを受光するPSD60からの出力をもとに、ミラー13の回動状態を精度良く検出でき、その結果、ビームスキャン位置の検出精度を高めることができる。また、支軸12の端部に小さなレーザチップ50を配する構成であるため、ミラーホルダ10に付加される構成を極めて簡素かつ小型化することができる。よって、ミラーホルダ10の構成の簡素化と、ミラー13の駆動レスポンスの向上が図られる。
(もっと読む)
光学デバイスおよび電子機器
【課題】小型化を図ることができると共に被検出物の検出時間を短縮できる光学デバイスを提供する。
【解決手段】一つの発光素子2、一つの二次元位置検出受光素子3およびIC4を備えている。このように、上記発光素子2を一つだけ使用しており、小型化を図ることができると共に、被検出物の検出時間を短縮できる。
(もっと読む)
3次元環境計測装置及びそれを備えた移動ロボット
【課題】広範囲な計測をするとともに、必要に応じて測定点の粗密を調整して適切な密度で、さらには、移動しながら計測する場合でも、移動によるずれをなくして誤認識せずに3次元形状を計測することができるようにする。
【解決手段】レーザで平面状にスキャンして環境の2次元形状を取得するセンサ1と、センサ1をチルト回転させるモータ2と、モータ2の回転速度を制御するモータ制御装置3とを備えた3次元環境計測装置において、操作者によって予め入力される、センサ1のスキャン速度に対するセンサのチルト動作の回転速度の比に応じてモータ2の回転速度を変更する回転速度指令を生成し、該回転速度指令をモータ制御装置3へ与える指令生成装置4を備えた3次元環境計測装置とそれを搭載した移動ロボットとした。
(もっと読む)
領域を3Dで取り込む装置および方法
空間領域の三次元被写域に対応した装置は、空間領域内の物点(20)までの範囲を特定するレンジファインダを有すると共に、画像記録ユニット(70)を有する。前記レンジファインダは、主にビームの形式で、物点に送信信号(18)を送信する送信機(12)と、前記物点からの反射信号(24)を受け取る受信機(14)と、前記送信信号(18)と前記反射信号(24)とに基づいて、前記物点までの範囲を決定するように設計された評価制御ユニット(16)とを含む。本装置は、更に、前記送信信号(18)を異なる空間的方向に向けるように設計されたビーム走査ユニット(23,30,54)を含む。画像記録ユニット(70)は、既定の画像記録領域を持ち、ビーム走査ユニット(22,30,54)と連結されて、前記画像記録領域と前記送信信号(18)とを同一の物点に整列させる。  (もっと読む)
(もっと読む)
車両用環境認識装置及び車両用環境認識方法
【課題】ピッチング等の車両挙動が発生した場合でもその影響を受けず安定した障害物検出を行う車両用環境認識装置を提供する。
【解決手段】スリット光発光装置5からスリット光を、自車体の下方から車体の前方に向かって一定の角速度でスキャンし、撮像画面14におけるスリット光の移動変化の有無を、物体検出プログラムP9によって監視することで走路や物体の抽出を行う。また、スリット光とは別に前方に向かって照準光を照射し、撮像画面14における照準光の位置変動に基づいて、車体の上下動に伴うスリット光の位置変動の補正を行う。
(もっと読む)
距離測定方法及び距離測定装置
【課題】
走査型の光波距離測定方法及び光波距離測定装置に於いて、測距光の光束断面でのスペックルパターンの影響を平均化し、光強度を増大させることなく、測定精度を向上させる。
【解決手段】
測距光13を測定対象物2に照射し、反射光を受光して距離測定を行う距離測定方法に於いて、所定の広がり角の光束を少なくとも1つ有する測距光を走査照射し、前記光束が測定対象物を横切る間に少なくとも2回パルス発光させ、少なくとも2回反射光を受光して測距し、測距結果を平均化する。
(もっと読む)
被測定物検出装置
【課題】電磁波を周囲空間に走査することによって形成される平面状の走査領域の形態を、容易に変更可能な被測定物検出装置を提供する。
【解決手段】電磁波を周囲空間に走査して平面状の走査領域を形成し、走査領域内で反射して戻ってきた電磁波に基づいて走査領域内に存する被測定物を検出する被測定物検出装置本体2の周囲空間に、電磁波を反射して走査領域の形態を変更する反射部3を配置した。
(もっと読む)
空間領域の監視装置
空間領域に関する監視装置(1)はアナモルフィック光学系(4)が対応付けられている受信器(2)を有する。さらに監視装置(1)は送信器(10)を有し、この送信器(10)はビームパルス束(11)を用いて受信器(2)に対応付けられている視野(8)を走査する。評価ユニット(12)において実施される短時間積分でのビーム伝播時間検出によって、視野(8)内のオブジェクトの距離画像を形成することができる。  (もっと読む)
(もっと読む)
駐車余地を測定する赤外線センサ及び車両に対する周囲の状況の監視
本発明は、車両(2)の側面に配置されたセンサ(14)によって車両(2)の横の周囲の状況を検出する装置に関する。このセンサは、電磁ビームを監視空間内に送信する送信装置及びこの監視空間内の物体で反射した電磁ビームを受信する受信装置を有する。この場合、検出信号が、反射した電磁ビームの受信時に受信装置によって生成可能である。 この装置は、本発明により、監視空間が、少なくとも2つの検出領域(18;16,18,20)を有し、この場合、第1検出領域(18)が、車両長手軸線に対してほぼ垂直に指向されていてかつ第1開口角度を有し、この場合、第2検出領域(16,18,20)が、第2開口角度を有し、この第2開口角度は、第1開口角度より大きいこと、第1検出領域(18)に割り当て可能な受信装置の検出信号が、パーキングエイド装置に入力可能であり、この場合、車両(2)が駐車余地(4)を通り過ぎる時に、駐車余地(4)が、パーキングエンド装置によって測定可能であること、及び第2検出領域(16,18,10)に割り当て可能な検出信号が、周囲監視装置に入力可能であることを特徴とする。  (もっと読む)
(もっと読む)
1 - 16 / 16
[ Back to top ]