
Fターム[5J084BB18]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学要素 (2,698) | 干渉フィルタ (50)
Fターム[5J084BB18]に分類される特許
21 - 40 / 50
画像撮像装置
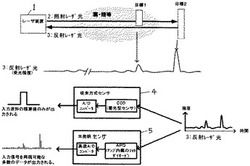
【課題】レーザレーダの測距精度の向上、レーザ光路上に複数の目標が有る場合への対応、および霧・雨等の影響を除去したデータ(画像)の取得。
【解決手段】レーザ照射後、光路上の全ての反射レーザ光の信号レベルをA/D変換器により時系列に取得する。A/D変換した信号からソフトウエアによる移動平均、ピーク検出処理により受光信号のピークレベルを正確に検知し、精度の高い測距データを得る。また、A/D変換データ上にある複数のピークを検出することにより、複数目標の距離を測定可能となる。更に、A/D変換データ上の所定の閾値以上の反射信号強度のみを抽出、表示することにより、霧・雨や背景のデータを削除した画像を表示する。
(もっと読む)
受光装置、情報取得装置および物体検出装置

【課題】フィルタの傾きの変化によって生ずる入射光の焦点ずれを抑制することができる受光装置、情報取得装置および物体検出装置を提供する。
【解決手段】情報取得装置1は、レーザ光源11から出射され目標領域から反射されたレーザ光を受光して信号を出力するCMOSイメージセンサ17と、レーザ光をCMOSイメージセンサ17へと導く受光光学系とを備える。ここで、受光光学系は、フィルタ15を具備する。フィルタ15は、レーザ光の進行方向に対して傾けられることにより透過波長帯域がシフトする。さらに、受光光学系は、フィルタ15の傾きの変化に伴う当該フィルタ15内での光路長の変化を補償するための透過板16を具備する。
(もっと読む)
距離画像撮影装置
【課題】正確な距離画像の撮影を可能とする距離画像撮影装置を提供する。
【解決手段】撮像空間内に向けて光波を照射し、当該光波を照射された当該撮像空間内の物体からの反射波の伝搬遅延時間に基づいて物体までの距離を示す距離画像を撮像する距離画像撮影装置であって、異なる波長帯の複数の光波を他の物体に向けて発光する光波照射手段と、複数の光波の反射波を波長帯毎に受光し、各反射波の受光量を検出する受光手段と、複数の光波各々の伝搬遅延時間を算出する遅延時間算出手段と、受光した反射波の受光量の大きさを各々比較して、当該受光量の大小を判定する受光量判定手段と、少なくとも、受光手段における受光量が最も大きい波長帯の光波の伝搬遅延時間に基づいて物体までの距離を算出する距離算出手段と、距離算出手段により算出された物体までの距離に基づいて距離画像を生成する距離画像生成手段とを備える、距離画像撮影装置。
(もっと読む)
高解像度三次元撮像のシステムおよび方法
本発明の実施形態は、広い視野および精密なタイミングを用いた三次元撮像のためのシステムおよび方法を提供する。一側面によれば、三次元撮像システムは、広い視野を有する現場を照射するのに十分な発散で光パルスを放出するように構成される、照射サブシステムを含む。センササブシステムは、場面によって反射または散乱された光パルスの部分を広い視野にわたって受容するように構成され、時間の関数として、受容された光パルス部分の強度を変調し、変調された受容された光パルス部分を形成するように構成される、変調器と、受容された光パルス部分に対応する第一の画像、および変調された受容された光パルス部分に対応する第二の画像を生成するための手段とを含む。プロセッササブシステムは、第一および第二の画像に基づいて、三次元画像を取得するように構成される。  (もっと読む)
(もっと読む)
物体検出装置および情報取得装置
【課題】目標領域に投射された光を適正に受光でき、よって、目標領域の情報を精度よく取得できる情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、所定波長帯域の光を出射するレーザ光源11と、レーザ光源11からの光を目標領域に向けて投射する投射レンズ12と、目標領域から反射された反射光を受光して信号を出力するCMOSイメージセンサ16と、反射光をCMOSイメージセンサ16へと導く撮像レンズ14と、レーザ光源11からの光を透過させるためのフィルタ15を具備し、さらに、フィルタ15を傾けるアクチュエータ50を有する。フィルタ制御回路26は、透過波長帯域がレーザ光源11からの光の波長帯域に近づくよう、フィルタ15を傾ける。
(もっと読む)
六自由度計測装置及び方法
六自由度計測用のレーザ追尾システムとして、第1レーザビームを輻射する主光学アセンブリ、第2レーザビームを二次元パターンへと整形して輻射するパターン投射アセンブリ、並びに標的を備え、その標的が再帰反射器及び位置検出アセンブリを有し、その再帰反射器の対称中心が位置検出アセンブリの存在平面とは異なる平面上にあるものを提案する。標的の向きを計測する方法として、二次元パターンを呈するようレーザビームをその標的に入射させるステップと、位置検出アセンブリ上における二次元パターンの位置を調べそのパターンの実測シグネチャ値を求めるステップと、得られた実測シグネチャ値に基づき標的の向きを算出するステップと、を有する方法を提案する。  (もっと読む)
(もっと読む)
光学式測距装置及び方法
【課題】外乱光が多く且つ変動する環境においても不要な測定を減少させて正しく動作する光学式測距装置及び方法を提供する。
【解決手段】ヒストグラム回路337が、投光部20のパルス光投光時間とアバランシェフォトダイオード332のパルス光受光時間との時間差を繰り返し計測して時間差のヒストグラムを作成し、信号処理回路338が、ヒストグラム回路337が作成したヒストグラムの極大値に基づいて対象物までの距離を算出する3Dカメラ10において、信号処理回路338は、ヒストグラム回路337が作成したヒストグラムの信頼度を算出し、算出したヒストグラムの信頼度が閾値以上である場合に、ヒストグラム回路337にヒストグラムの作成を停止させる。これにより、外乱光が多く且つ変動する環境でも、ヒストグラムの信頼度が高いときにヒストグラムの作成を停止し、不要な測定及び演算を減らす。
(もっと読む)
画像取得装置及び方法
【課題】対象物との距離に依存しない対象物の画像を取得することが可能な画像取得装置及び方法を提供する。
【解決手段】投光部20は、投光期間に対象物Oへパルス光を繰り返し照射し、投光休止期間に対象物Oへのパルス光の照射を休止して、各アバランシェフォトダイオード332の周辺回路333aは、投光休止期間に対象物Oから受光した光の強度を求め、投光部20がパルス光を照射した時刻と反射パルス光を受光した時刻との時間差に基づいて対象物Oまでの距離を算出するための読み出し回路に接続されている。これにより、各アバランシェフォトダイオード332は、投光休止期間において受光する光の強度に投光部20が照射したパルス光の反射光L2の成分が含まれないことになり、対象物Oとの距離に依存しない対象物Oの画像を取得することが可能となる。
(もっと読む)
方位測定方法及び方位測定装置
【課題】光の放射角を走査することなく、対象物の方位を高速度で検出する
【解決手段】所定波長帯域光を波長に依存して放射角が異なるように分散させて、放射する照射装置と、照射装置により放射された光の対象物からの反射光を受光する受光装置と、受光装置による受光結果から対象物の方位を決定する方位決定装置とを有する。また、照射装置は、スーパーコンティニュアム光を放射する装置である。パルス光を放射する時刻から、反射光の受光時までの遅延時間を測定し、遅延時間から対象物までの距離を測定する距離測定装置を有する。これにより光の放射角を走査することなく、一度に、3次元空間における対象物の座標を測定することができる。
(もっと読む)
光周波数発生器を用いた絶対距離測定方法及びシステム
【課題】光周波数発生器を用いた絶対距離測定方法及びシステム。
【解決手段】(a)光周波数発生器100を用いて、安定化した異なる複数の波長λiを生成するステップと、(b)周波数走査干渉計200を用いて、測定する距離の初期推定値を取得するステップと、(c)取得した初期推定値の不確度の範囲を分析するステップと、(d)多波長干渉計によって各波長λiに対する干渉信号を解析して、各波長λiに対する小数部εiを測定するステップと、(e)初期推定値の不確度の範囲内で、各波長λiに対する整数部miを決定するステップと、(f)上記異なる複数の波長λiに対するそれぞれの小数部εi及び整数部miを用いて、測定する距離の絶対距離Lを測定するステップとを含む。
(もっと読む)
光波レーダ装置
【課題】内部反射光と局部発振光とのビート信号が抑圧されて受信器が飽和せずに、近距離からの計測が可能である光波レーダ装置を提供する。
【解決手段】光波レーダ装置は、レーザ光を連続発振する基準レーザ光源(1)と、基準レーザ光源からのレーザ光の一部を局部発振光および残りを送信光としてそれぞれを2つの光路に出力する光スイッチ(2)と、一方の光路を伝播する送信光を大気中に送信するとともに大気中での散乱光を受信光として受信する望遠鏡(5)と、送信光と受信光との光路を切り替える光サーキュレータ(4)と、受信光と局部発振光とを合波し合波光として出力する光合波器(6)と、合波光を検波しビート信号を生成する光検波器(7)と、ビート信号を周波数変換して風速または風向を検出する信号処理装置(8)と、を備える光波レーダ装置において、他方の光路を伝播する局部発振光を時間遅延する時間遅延手段(12)を備える。
(もっと読む)
測距装置および測距方法並びにプログラム
【課題】精度良く測距を行うことができるようにする。
【解決手段】測距光源16が、所定周期にて強度が時間的に変化するように変調された第1の測距光、および所定周期にて強度が一定のパルス波状に変調された第2の測距光を切換可能に発光する。第1の測距光を発光し、第1の測距光の変調周期における位相が異なる複数の受光期間において複数の第1の受光信号を取得し、次いで、第2の測距光を発光し、第2の測距光の変調周期における複数の受光期間において複数の第2の受光信号を取得し、複数の第1の受光信号に基づいて、距離情報の算出に使用する第2の受光信号を選択する。距離画像生成部31が、選択した第2の事項信号を用いて距離情報を算出する。
(もっと読む)
測距装置および測距方法並びにプログラム
【課題】精度良くかつ高速に測距を行うことができるようにする。
【解決手段】測距光源16が、所定周期にて強度が時間的に変化するように変調された第1の測距光、および所定周期にて強度が一定のパルス波状に変調された第2の測距光を切換可能に発光する。第1の測距光を発光し、第1の測距光の変調周期における位相が異なる複数の受光期間において複数の第1の受光信号を取得し、複数の第1の受光信号に基づいて、第1の測距光と第1の測距光の反射光との位相差を算出し、位相差に基づいて第2の測距光の位相を第1の測距光とは異なるように変更して第2の測距光を発光する。第2の測距光の変調周期における位相差に応じた複数の受光期間において複数の第2の受光信号を取得し、複数の第1の受光信号に基づいて、距離情報の算出に使用する第2の受光信号を選択する。距離画像生成部31が、選択した第2の事項信号を用いて距離情報を算出する。
(もっと読む)
形状測定装置
【課題】スリット光を用いた三角測量において、被検物によってスリット光が正反射された場合においても、被検物の形状を部分的に欠落することなく測定する。
【解決手段】
この3次元形状測定装置10は、第1投光部11、第2投光部12、撮像部13、および画像処理部14を備える。第1投光部11と第2投光部12とは、異なる照射角で被検物1を照射するので、一方からのスリット光が正反射したとしても、それと同時に他方からのスリット光が正反射することはない。よって、正反射が生じていない方の投光部の照射光の反射光を撮像した画像を採用し、被検物1の3次元形状を解析する。本発明は、スリット光を用いた三角測量により被検物の3次元形状を測定する測定装置に採用することができる。
(もっと読む)
光学式測距センサおよびそれを備えた機器
【課題】測距センサの投光ビームの周辺光に起因して非測距対象物を誤測距または誤検知することを回避できる三角測距方式の光学式測距センサを提供する。
【解決手段】この光学式測距センサは、受光素子12の受光面12aの検知領域U1に形成されている光学フィルタ22が、所定の測距距離を上回る距離だけ離れた非測距対象物18で投光ビームの周辺光が反射した反射光が受光レンズ14を経由して受光素子12の受光面12aに入射する入射光の光量を低減させる。これにより、測距センサの投光ビームの周辺光に起因して非測距対象物18を誤測距または誤検知することを防止できる。
(もっと読む)
光波距離計
【課題】 遠距離測定の際に太陽光等による強い外乱を受けた場合にも、測定値がばらついたり、測定不能になったりしないようにしたノンプリズム型の光波距離計を提供する。
【解決手段】 基準信号(K)を発生させる基準信号発振器(24)と、基準信号を基に変調された測距光(L1)を出射する発光素子(1)と、測定対象物(5)で反射してきた測距光を受光して測距光を測距信号(M)に変換するAPD(6)と、基準信号と測距信号の位相差から距離を算出する演算制御部(36)とを備えた光波距離計において、APDのバイアス電圧を与える逆電圧回路(38)を備え、演算制御部は太陽光(52)等による外乱光に応じてAPDの出力のS/Nが最大になるように逆電圧回路の出力電圧を制御する。
(もっと読む)
センサ
【課題】被写体までの距離の計測の精度が悪くなるのを抑制することが可能なセンサを提供する。
【解決手段】このセンサ100は、LED2から照射されて被写体により反射された反射光を検出することにより被写体までの距離を計測するための画素42を備え、画素42は、画素42に蓄積される信号電荷を衝突電離させて増加するための高電界領域422aを含む。
(もっと読む)
レーザ測距装置及びレーザ測距方法
【課題】ターゲットとの距離に応じた受信レベルの変化に幅広く対応して、必要なダイナミックレンジを確保するとともに、機械的な可動部による信頼性の低下を回避する。
【解決手段】レーザダイオード2から出力されるパルスレーザ光をターゲットに向けて送信するとともに、ターゲットに反射したパルスレーザ光を、受信光の波長を選択するバンドパスフィルタ4を介して受信し、送受信したパルスレーザ光の回帰時間測定に基づいて、ターゲットとの距離を測定するレーザ測距装置1又はレーザ測距方法において、レーザダイオード2の加温や冷却に基づいて、レーザダイオード2から出力されるパルスレーザ光の波長を変更し、レーザダイオード2から出力されるパルスレーザ光の波長を、バンドパスフィルタ4の透過中心波長に対してシフトさせることにより、ターゲットに反射したパルスレーザ光の受信レベルを制御する。
(もっと読む)
撮影装置および方法並びにプログラム
【課題】TOF方式において測距を行う場合に、正確に測距を行うことができるようにする。
【解決手段】光学的距離算出部52が、被写体に光を照射し、光の被写体による反射光を撮像系20により検出し、光が出射されてからその反射光が撮像系20により検出されるまでの時間に基づいて被写体の光学的な被写体距離を算出する。この光学的な被写体距離を算出するに際し、発光部41A,41Bから波長が異なる複数の光を被写体に照射する。そして、撮像系20が複数の光の被写体による反射光を異なる波長毎に受光する。強度取得部50が、受光した反射光の強度を取得する。
(もっと読む)
画像撮像装置及び距離測定方法
【課題】光が照射された被写体から得られる出射光を撮影し、被写体の奥行き距離を簡便に測定することのできる画像撮像装置及び距離測定方法を提供する。
【解決手段】第1の波長を有し、光軸と垂直な面において第1の強度分布を有する第1の照射光と、第1の波長とは異なる第2及び第3の波長を有し、光軸と垂直な面において第1の強度分布とは異なる第2の強度分布を有する第2の照射光とを、同時に被写体に照射する照射部と、被写体から得られる出射光から、第1の波長を有する第1の出射光と、第2の波長を有する第2の出射光と、第3の波長を有する第3の出射光とを光学的に分離する分光部と、それぞれの強度を撮像及び検出する撮像部及び光強度検出部と、第1、第2及び第3の出射光の強度に基づいて被写体までの奥行き距離を算出する奥行き距離算出部とを備えた。これにより、被写体の奥行き距離を簡便に測定することができる。
(もっと読む)
21 - 40 / 50
[ Back to top ]