
Fターム[5J084EA27]の内容
光レーダ方式及びその細部 (24,468) | 目的 (2,756) | 誘導 (33)
Fターム[5J084EA27]に分類される特許
1 - 20 / 33
無人走行体を用いた環境情報の取得システム
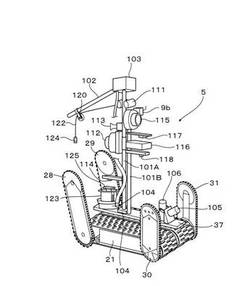
【課題】粉塵、煙又は水蒸気が立ち込める劣悪な環境下においても構築物内の環境を正確に取得可能な環境情報の取得システムを提供する。
【解決手段】遠隔操縦装置を用いてオペレータにより遠隔操縦される無人走行体5に、走査式二次元測距装置105と、放射線検出器116を搭載する。また、安全な場所には、遠隔操縦装置を備えた制御装置本体を設置する。制御装置本体は、遠隔操縦装置の操作内容に応じた制御信号を出力して無人走行体5の走行制御を行いながら、走査式二次元測距装置105の検出データから生成される三次元画像と、放射線検出器116の検出データを合成し、制御装置本体に接続された表示装置に表示する。
(もっと読む)
自己位置推定装置、方法、及びプログラム

【課題】自己位置の推定精度を向上させる。
【解決手段】自己位置推定装置1は、移動体の複数の視点から取得される環境データに基づいて視点毎に二次元マップを作成するマップ作成部2と、複数の二次元マップの中から直線部が比較的多い二次元マップを抽出するマップ抽出部3と、抽出された二次元マップと、当該抽出された二次元マップと同一の視点から取得される環境データとの照合結果に基づいて、移動体の自己位置を推定する位置推定部4とを備える。
(もっと読む)
位置・姿勢推定可能な移動体システム及び自律移動ロボットシステム
【課題】照射するレーザ光の反射光によって周囲の幾何的特徴を識別し、自装置の現在位置・姿勢を推定する際、幾何的特徴に乏しい環境においても確実に位置・姿勢を推定することが可能な移動体システムを提供する。
【解決手段】光学作用部材35を移動経路の棚や壁面等の障害物32に任意な位置と間隔にて取り付け固定する。これにより、移動体10から照射されるレーザ光は、障害物32から距離センサ部12に向けて反射するが、光学作用部材35からは反射光が到達しないため、反射光によって得られる幾何形状データ34に新たな幾何的特徴を生成することができ、移動体10は容易に自装置の現在位置及び姿勢を推定することができる。
(もっと読む)
人物検出装置、人物検出方法及びプログラム
【課題】人物検出装置、人物検出方法及びプログラムにおいて、人物の移動時及び静止時にかかわらず脚の特徴を抽出して人物を正確、且つ、比較的簡単に検出することを目的とする。
【解決手段】重力方向と略垂直な平面で走査範囲を走査して基準位置から走査範囲内の対象物までの距離を測定してレンジデータを出力する走査部と、レンジデータを所定周期でサンプリングしてセグメントを形成し、セグメントに基づいて脚の特徴を抽出する抽出部と、抽出した特徴の運動特性及び幾何情報に基づいて人物を検出する検出部を備え、抽出部は、最短距離近傍法を用いて取得した2つのセグメントペアの移動特性に基づいて、各セグメントペアが静止している静止セグメントを分類する静止特徴強分類器と、各セグメントペアが移動している移動セグメントを分類する移動特徴強分類器を含み、分類されたセグメントの特徴に基づいて2つのセグメントペアから脚ペアを抽出するように構成する。
(もっと読む)
搬送車両および運転支援装置
【課題】パレットに対して搬送車両を進行させるべき方向を運転者が容易に認識できる搬送車両および運転支援装置を提供すること。
【解決手段】周囲状況画面では、搬送車両1の周囲状況として、第1レーダレーダ5A(又は、第2レーダレーダ5B)の走査により障害物が検出されなかった障害物非検出エリアAと、障害物の影となって測定が行えない検知不可能エリアBとが、それぞれ異なる表示態様で表示される。例えば、障害物非検出エリアAと、検知不可能エリアBとが、運転者が区別可能に、別々の色で表示される。これにより、搬送車両1がパレット100の架台部100aの下に進入する場合に、搬送車両1をパレット100の架台部100aの下に進入させることが可能な進入経路を、運転者が容易に見いだすことができるので、パレット100に対して搬送車両1を進行させるべき方向を運転者が容易に認識できる。
(もっと読む)
自己位置推定装置および自己位置推定方法
【課題】高サンプリング周期で、高精度に自己位置を推定することが可能な自己位置推定装置を提供する。
【解決手段】本発明の自己位置推定装置は、移動機構を備え、所定の空間を移動可能な自律移動装置の移動機構による動作情報を検出する内界センサ、および所定の空間内に関する空間情報を検出する外界センサによる検出結果に基づいて、第1のサンプリング周期で自己位置を推定する第1の自己位置推定部と、第1の自己位置推定部による自己位置推定結果と、内界センサにより検出された自律移動装置の動作情報とに基づいて、第1のサンプリング周期よりも高いサンプリング周期で自己位置を推定する第2の自己位置推定部と、を備える。
(もっと読む)
マップ作成方法および装置とそのマップを利用した定位方法
【課題】レンジデータと画像特徴点とを連合させるマップ作成および定位方法を提供し、作成された環境デジタルマップをパーソナルナビゲーション装置(PND)にも提供できるようにする。
【解決手段】マップ作成方法が提供される。環境が走査されて環境障害物の深さ情報を獲得する。環境の画像が捕捉されて画像平面が生成される。環境障害物の深さ情報が画像平面に投影されて、投影位置を獲得する。少なくとも1つの特徴ベクトルが、画像平面中の各投影位置周辺の予め決定された範囲から計算される。環境障害物の深さ情報および特徴ベクトルが合併されて、一時点に対するサブマップが生成される。全時点でのサブマップが連合されてマップを生成する。また、マップを使用する定位方法も提供される。
(もっと読む)
自律移動装置及びその制御方法
【課題】自己位置推定機能と足元の障害物検出機能とを良好に両立させること。
【解決手段】非接触式の距離センサ17と、移動状況に関する所定の条件に基づいて、足元の障害物検出処理か自己位置推定処理のいずれの処理を実行するか判定する判定部58と、足元の障害物検出処理を実行する場合に、距離センサ17からの測定信号の方向を足元付近に向けて変化させ、自己位置推定処理を実行する場合に、測定信号の方向を遠方の対象物を測定可能となる向きに変化させる反射部19と、距離情報に基づいて足元の障害物を検出する足元障害物検出部57と、距離情報に基づいて自己位置を推定し、移動量から求めた自己位置を、推定した自己位置を用いて補正する自己位置推定部55と、検出した障害物情報と、補正した自己位置とに基づいて、移動装置23の制御を行う走行制御部59と、を備える。
(もっと読む)
誘導装置及び目標判定装置
【課題】飛しょう体に搭載され、レーザ光を利用し目標の3次元画像と強度画像を生成してデータベースの格納データと比較することで、目標と背景を高精度で分離可能な誘導装置を提供する。
【解決手段】飛しょう体1に搭載する誘導装置10において、レーザ光を発振する装置とレーザ光を検出する装置を備え、目標2を含む範囲を誘導装置10から照射するレーザ光で走査することによって走査範囲から反射したレーザ光を受光及び検出し、検出した信号から走査範囲のレーザ光の反射強度分布及び3次元形状を算出して強度画像及び3次元画像を生成し、生成した強度画像と3次元画像を利用した信号処理により、目標を検出する。
(もっと読む)
周波数量子もつれ光子の生成及び検出
紫外線レーザはコヒーレント光を発生し、このコヒーレント光は下方変換されて周波数量子もつれ光子を生成する。量子もつれ光子の各対に関して、第1光子は第1光路に沿って、第2光子は第2光路に沿って、それぞれ伝送される。第1検出器は、第1光路に沿って伝送されるこれらの光子を検出し、第2検出器は、第2光路に沿って伝送されるこれらの光子を検出する。この検出は、シングルフォトン領域で行なわれる。同時計数を検出器の出力に対して行ない、この同時計数には、第1及び第2検出器の出力の立ち上がりエッジを時間窓内で比較することが含まれる。  (もっと読む)
(もっと読む)
電波・光波探知装置
【課題】この発明は、簡易な構成で、且つ、電波及び光波の双方の高精度な検知を実現して、探知性能の向上を図り得るようにすることにある。
【解決手段】二軸回りに回動自在に配したジンバル枠10の開口に電波検知系を形成するアンテナ12及び光波検知系を形成するリング状光学系11を同軸的に設けて、アンテナ12の背面側にリング状光学系11で取込んだ光波を集光する光学系17と共に、第1及び第2の光波検知器18,19を配し、電波及び光波の双方を検知するように構成したものである。
(もっと読む)
航空機の識別およびドッキング誘導システム
【課題】到来する航空機等の対象物を適当な停止点まで正確且つ能率的に追跡する。
【解決手段】到来する対象物(12)を追跡するシステムは、光パルスを発生する手段(20)と、そのパルスを外方に、到来する対象物に投射し、その対象物からそのパルスを反射させる手段(21,22,24,25)と、その対象物から反射した光パルスを収集する手段(20)と、システムを較正すべく、投射光パルスを既知の角度方向にかつ既知の距離に配置された較正要素に指向させる手段(26)と、所定点から延びる仮想軸線に対する位置を検出し、その対象物とその所定点の間の距離を検出して、その対象物の位置の追跡を可能とする手段(62)と、を有し、レーザ走査に関する情報を反映し既知の形状を表わす輪郭テーブルと比較される比較テーブルを生成し、各反射パルスについて対象物のノーズから測定装置までの距離の分布を記録する距離分布テーブルを生成し、予定停止位置までの平均距離を計算する。
(もっと読む)
障害物検出装置
【課題】移動体にピッチ角変化が生じても、障害物検知の範囲が適切に確保できる障害物検出を提供する。
【解決手段】車両1の走行方向X前方に向けて電磁波を照射すると共にその電磁波によるスキャン範囲を上下方向に設定した照射手段を、車幅方向左右に離して2つ設ける。その2つの照射手段からの照射方向2Gを、上記走行方向X前方で交差するように設定する。そして、照射した電磁波の障害物からの反射波に基づき障害物を検出する。
(もっと読む)
障害物検出システム及び障害物検出方法
【課題】正確に床検出を行うことが可能な障害物検出システム及び移動ロボットを提供すること。
【解決手段】本発明にかかる障害物検出システム100は、距離画像データを生成する距離画像センサ1と、前記距離画像データに基づいて障害物を検出するデータ処理部2とを備えている。データ処理部2は、距離画像センサ1により生成された距離画像データより得られる反射光強度と、距離画像センサ1によって生成された距離画像データによる距離に基づいて、障害物を検出する。
(もっと読む)
レーザセミアクティブ誘導方法
【課題】シーカによる目標の検出精度を向上でき、レーザ照射器に人員を配置する必要がなく、感度が良いシーカをミサイル等の飛翔体に搭載でき、レーザ照射器の小型化・軽量化ができるレーザセミアクティブ誘導方法を提供する。
【解決手段】レーザ照射器3が、飛翔体1の発射時刻(T0)から第1設定時間(T1)経過後に、シーカ1aにおけるレーザ反射光6の強度がシーカ1aの光検出感度範囲内となるようにレーザ出力を段階的もしくは連続的に下げていく。
(もっと読む)
白線検出装置
【課題】低負荷かつ高精度に道路面上の白線を検出する白線検出装置を提供することを課題とする。
【解決手段】道路面に描かれた白線を検出する白線検出装置1であって、電磁波を送信し、当該送信した電磁波の反射波を受信する電磁波送受信手段2と、その電磁波の送信及び受信に基づいて検出点までの距離を算出する距離算出手段2と、検出点までの距離に基づいて道路面を推定する道路面推定手段6と、道路面と推定された各検出点に対する電磁波の送信強度と受信強度に基づいて白線を検出する白線検出手段6とを備えることを特徴とし、同一の検出点に対する電磁波の送信強度と受信強度及び距離に基づいて当該検出点での反射率を算出する反射率算出手段6を備え、白線検出手段6は、道路面と推定された各検出点での反射率に基づいて白線を検出すると好適である。
(もっと読む)
駐車支援方法
【課題】 後退による駐車を行う際、駐車位置の事前計測を行わずに、駐車体勢の時点で駐車位置の検出と軌道の生成を行い、駐車位置へ誘導する駐車支援方法を提供することを課題とする。
【解決手段】 車両1の後方に設置したレーザ測定器11を用いて、車両後方にある駐車車両の輪郭を計測し、レーザ測定器11にて計測できない部分は計測結果に略矩形の形状を重ねることにより輪郭を補い、駐車車両11、12、及び隣接する仮駐車目標位置3を求める。次に車両1の現在位置と仮駐車目標位置3を結ぶ軌道4を求め、車両1を自動的に誘導する。後退駐車中も計測を繰り返し行い、駐車車両11、12、及び軌道4を適宜補正し、最終的に駐車位置5に車両1を誘導する駐車支援方法を提供する。
(もっと読む)
路車間通信システム、光ビーコン、車載機、及び車両
【課題】 ドライバに対する安全運転支援を精度よく行うことができる路車間通信システムを提供する。
【解決手段】 本発明の路車間通信システムは、通信領域を道路Rの所定範囲に設定する投受光器8を有する光ビーコンと、車両に搭載されるとともに、前記通信領域において投受光器8との間でアップリンク情報及びダウンリンク情報の送受信を行う車載機と、を備えている。投受光器8は、前記アップリンク情報を受光する受光面14aを有する受光部12を備えている。この受光部12は、受光面14aを道路R上に投影するようにアップリンク領域UAを設定するとともに、受光面14aにおける前記アップリンク情報を受光した受光位置に関する受光位置情報を出力する。光ビーコン4は、受光部12が出力する前記受光位置情報に基づいて、アップリンク領域UAにおいて前記車載機が前記アップリンク情報を送信した送信位置を示す車載機位置情報を生成し、この車載機位置情報を含んだ前記ダウンリンク情報を投受光器8に送信させる制御部を備えている。
(もっと読む)
視野切替部及び赤外線誘導装置
【課題】小さいスペースで迅速かつ高精度に複数の視野を切り替えることができる視野切替部、及び、該視野切替部を備える小型かつ高性能な赤外線誘導装置の提供。
【解決手段】検知器に入射赤外線を集光する集光光学系3に視野切替部5を設け、視野切替部5を、光軸(高視野光軸15a及び狭視野光軸16a)が一点で交差するように配置された複数の視野のレンズ群(高視野用レンズ15及び狭視野用レンズ16)と、これらを支持する支持体17とで構成し、支持体17に、複数の光軸が交差する点を通り複数の光軸を含む面に直交する方向に延びる回転軸18を設け、視野切替部5を回転軸18を中心に回転させることによって集光光学系3を構成するレンズ群を切り替えて、複数の視野の切り替えを可能にする。
(もっと読む)
自律移動装置及び平面状障害物認識方法
【課題】自律移動装置において、壁などの平面状障害物の位置を単純な手順により容易に認識可能とし、正確に自己位置を特定して、効率的で安全な自律走行を可能とする。
【解決手段】水平面内をスキャンし、反射波を受信して複数のスキャンポイントの座標を取得し、時系列的に前後する2つのスキャンポイントについて、要素ベクトルを形成し、複数の要素ベクトルの中から時系列的に前後し、かつ互いに連続する複数の要素ベクトルで、その長さが第1所定長以下であり、角度が第1所定角度以下であり、角度の積算値が第2所定角度以下であるものを選択し、ベクトル合成して1つのスキャンセグメントベクトルとし、スキャンセグメントベクトルの始点と終点により定義される線分が第2所定長以上であるときに、そのスキャンセグメントベクトルに沿って平面状障害物が存在していると認識する。
(もっと読む)
1 - 20 / 33
[ Back to top ]