
Fターム[5K102AA24]の内容
光通信システム (58,656) | 目的、課題 (7,472) | 光空間伝送の特性改善 (619) | 光空間伝送の光軸調整 (162) | 自動追尾 (47)
Fターム[5K102AA24]に分類される特許
1 - 20 / 47
捕捉追尾制御装置
【課題】粗駆動機構と精駆動機構との2種の駆動機構の協調制御を行うことにより目標に対して高速高精度に捕捉追尾を行なうことができ、小型軽量化を図れる捕捉追尾制御装置を提供する。
【解決手段】捕捉追尾制御装置10は、移動体の光通信等における光アンテナの指向角制御において、粗駆動機構21および精駆動機構15の2つの駆動機構を有する。
(もっと読む)
捕捉追尾装置

【課題】簡易な構成で、初期捕捉および高精度捕捉を行い、受信部で受光する光ビームの損失を最小限に低減し、受光量が微量な場合でも捕捉追尾を行う。
【解決手段】光ビームを偏向する第1の光路偏向手段1と、光ビームを集光する集光手段3と、光ビームを偏向する第2の光路偏向手段5と、第2の光路偏向手段5に設け、光ビームが基準光軸30と一致する際の集光スポット近傍かつ集光スポットサイズ以上のピンホール4と、第2の光路偏向手段5を通過した光ビームを受信する受信部10と、第2の光路偏向手段5により偏向された光ビームに基づき光ビームと基準光軸との角度ズレを検出する第1の光検出手段6と、光ビームを分岐する光分岐手段2と、分岐された光ビームに基づき光ビームと基準光軸30との角度ズレを高精度に検出する第2の光検出手段7と、角度ズレに基づき、第1の光偏向手段1の偏向方向を補正する偏向方向補正手段8とを備えた。
(もっと読む)
光空間通信における捕捉追尾方法、捕捉追尾機構および捕捉追尾システム
【課題】
本発明は、光空間通信において高精度に相手局を初期捕捉して捕捉追尾することが可能な光空間通信における捕捉追尾方法、捕捉追尾機構および捕捉追尾システムを提供することを目的とする。
【解決手段】
本発明に係る捕捉追尾機構10は、パルス状の初期捕捉光50を送信し、初期捕捉光50が反射された反射初期捕捉光60を受信する光アンテナ部20と、初期捕捉光50を生成して出力すると共に反射初期捕捉光60を検知した時に検知信号を生成して出力する初期捕捉部30と、初期捕捉時に初期捕捉光50を所定の軌道で走査し、初期捕捉部30から検知信号が入力された時に初期捕捉から捕捉追尾に移行する制御部40と、を備える。
(もっと読む)
情報処理装置
【課題】 送信元の光源と受信側の受光部との少なくともいずれか一方が移動している場合に、通信信号の取得漏れの可能性を低減すると共に、光通信の通信速度及び受光した光の処理時間が光電素子の数に依存せず短縮化できる情報処理装置を提供する。
【解決手段】 情報処理装置1において、取得手段3は、複数の光電素子6のうち所定の光電素子6によって変換された電気信号を取得する。制御手段4は、送信元の光源から送信された光を受光した光電素子6を電気信号に変換された電荷量に基づいて決定する。そして、複数の光電素子6のうち所定の光電素子6の電気信号を取得した後に、所定の光電素子6に隣接する光電素子6のいずれの電気信号を取得するかを所定の条件に基づいて決定し、この決定した光電素子6の電気信号を取得するように取得手段3を制御する。
(もっと読む)
光空間伝送装置
【課題】情報を伝送する光信号の発光と光軸調整のための光信号の発光を同一の発光素子で行う。
【解決手段】。ビーコン生成回路23は、伝送信号とは異なる周波数帯のビーコン信号を生成する。重畳回路24は、入力信号とビーコン信号を重畳し重畳信号電圧とする。発光部26は、発光素子27の点滅により、重畳光信号を送信する。受光部42は、重畳光信号を受光する4つの受光素子43を有する。ローパスフィルタ46は、4つの重畳信号電圧から4つのビーコン信号を分離する。レベル検出回路47は、この4つのビーコン信号のレベルを検出する。方向検出回路48は、これらのレベルから発光軸方向と受光軸方向の差を検出する。方向調整部49は、レンズ41と受光部42を移動し受光軸方向を調整する。ハイパスフィルタ50は、変換された重畳信号電圧から入力信号を分離する。出力部55は伝送信号を出力する。
(もっと読む)
通信装置
【課題】光通信を用いた通信装置において、子機が移動した場合にも通信が途切れることがなく、子機の消費電力を低減し、長時間の連続通話を可能とする。
【解決手段】子機20は、親機10に設けられた親機受光部12に対して送信用の光を照射する複数の子機発光部33a,33bと、子機に加えられる加速度を検知する加速度センサ50を備えている。2つの子機発光部は、子機に対する取付方向が異なる。加速度センサ50は、使用者の姿勢に応じて移動する子機20の加速度を検知する。通信方向演算部52は、検知された加速度と親機位置記憶部53に記憶されている親機の位置に基づいて、親機の方向を演算する。制御信号出力部55は、演算された親機の方向に基づいて、2つの子機発光部の切換を行う。
(もっと読む)
光無線通信装置
【課題】光ファイバで直結される信号光と信号光に比べ短波長のビーコン光を共通の屈折率光学系で送受信する光無線装置において、収束・発散追尾光方式を採用した場合に、ビーコン光の遮断に伴って光軸を制御する追尾制御系が不安定になるという問題を解決し、ビーコン光の遮断時にも通信回線の維持を図る光無線通信装置を提供する。
【解決手段】ビーコン光の到来方向を基準として送信光の指向誤差を補正する追尾装置のほかに、正常な追尾が動作している時のビーコン光の到来角変動を基に将来の最も確からしい追尾光の到来角を予測する推定装置を追尾装置とは独立に動作させておき、追尾光の遮断時にはこの予測値を用いて光無線通信装置の送信光の指向方向を受信機の方向に正しく指向させる推定装置を備える。
(もっと読む)
可視光データ処理装置、可視光通信システム、可視光データ処理方法及びそのプログラム
【課題】画像センサ通信方式の可視光通信において、車両の走行速度を考慮した確実な可視光通信を実現することが求められる。
【解決手段】本実施形態によれば、可視光データ処理装置は、メモリと、注目領域設定部と、取得部と備えた構成である。前記メモリは、時系列の複数の画像データを記憶する。前記注目領域設定部は、前記画像データについて、通信対象である可視光の発光位置を含む注目領域を連続的に設定する。前記取得部は、前記メモリに記憶された前記各画像データから、前記注目領域設定部により設定される注目領域の画像データを取得する。
(もっと読む)
レーザ通信機
【課題】細いレーザ光を相手ビーコン光の到来方向に送信した際に、遠方にあって狭い受光範囲を有する相手受信器がそのレーザ光を確実に受信できるレーザ通信機を提供すること。
【解決手段】レーザスポット光強度センサ50a、50b、50c、50dを備え、通信用のレーザスポットがどのような位置で受信されているかを検出し、その情報によってビーコン光を変調してビーコン送信器40によって相手レーザ通信機に送り、その情報を受けたレーザ通信機は、この情報に基づいて送信する通信レーザ光の方向を制御する。
(もっと読む)
送信方向制御をする光送受信機
【課題】光送受信機の送信方向および受信方向間の差を、追跡段階中の各瞬間で正確に補償する。
【解決手段】光送受信機100は、送信システム10と、受信システム20と、送信システム50によって発出された信号の一部を受信システムへ向ける結合システムとを備える。送信信号のその一部は、受信信号を検出するために専用の光検出器マトリックスの実用領域(ZU)の外側で、受信システムの光検出器マトリックスによって検出される。したがって、受信信号が検出されると同時に、リアルタイムで送信方向を測定できる。
(もっと読む)
空間光通信装置およびその方法
【課題】本発明は、通信相手から送られてくる光ビームを追尾することを実現するときに、機械的可動部分を排除し、一層の小型化を実現することを目的とする。
【解決手段】レンズ系を使って、遠方の通信相手から送られてくる光ビームを受け取ると、ビームスプリッタを使って、2つの光ビームに分割する。そして、分割された一方の光ビームが集光することになる焦点面上で、エリアセンサを使って、その光ビームを検出する。続いて、エリアセンサのどの受光素子が光ビームを受光したのかを検出して、その配置座標に対応付けられる配置座標を持つレーザアレイのレーザを、通信相手に向けて光ビームを送信するレーザとして選択する。そして、そのレーザを使って、通信相手に向けて送信する光ビームを生成することで、分割された他方の光ビームが集光することになる焦点面上で、レーザアレイを使って、通信相手に向けて送信する光ビームを生成する。
(もっと読む)
光空間通信システムとこのシステムに用いられる光通信ユニット
【課題】光軸ずれの修正に必要なパイロット光を通信光とは別波長で固定側から電源フリーで送出可能とする。
【解決手段】固定側、ユーザーエンド側光通信ユニットA,Bの間で、波長λ1,λ2によるレーザー光により双方向光通信を行う。コリメータB2の直前に配置される光ビーム制御装置Cは、固定側コリメータA4より発せられるレーザー光をパイロット光としてモニターし、その伝播経路をフィードバック制御することにより、ユーザー側コリメータB2の光軸と一致させて外乱の影響を吸収し、光空間通信を維持する。ここで、ユーザーエンド側の光通信ユニットBに第3の波長λ3の光源B8を用意し、これをコリメータA4へ向けて照射して結合し、さらにこの第3の波長λ3のみを全反射させて、光ビーム制御装置Cへ光軸調整用のパイロット光として用いる。
(もっと読む)
光空間通信システムの光ビーム制御装置
【課題】 光ビームの光軸ずれを補正する制御処理中の遮断による不安定動作を解消する。
【解決手段】 光ビーム制御装置13は、光ビーム光軸補正用の駆動ミラー131で反射される光ビームを分岐しPSD135に導いてビームスポット位置信号と受光パワー信号を取得し、ビーム位置制御器136に入力する。ビーム位置制御器136は、ビームスポット位置信号と減算器21で光軸一致目標値との差分を求め、アンプ22でフィードバックゲインKを乗じて乗算器23に送る。一方、比較器24において受光パワー信号を闘値と比較し、閾値を上回る場合には乗算器23に“1”を与えてアンプ22からの出力を積分器25で積分し、駆動ミラー131に変位指令値として出力する。闘値を下回る場合には、乗算器23に “0”を与えて積分器25への入力を0とし、積分器25に光ビームの遮断が発生する直前の出力を維持させる。
(もっと読む)
双方向空間伝送装置
【課題】シンチレーション量が多いときにシンチレーションによる影響を低減し、少ないときに受信光を無駄に損失させることなく受光する。
【解決手段】絞り機構は100msごとに絞り駆動信号に基づいて開閉を行う。S11において総受信レベルが閾値以下であればS12に進み、絞り機構を開く方向に動かす。また、閾値レベルよりも大きければS13に進み、1分間の角度ずれ信号の最大値と最小値を抽出し差を出力する。S14、S15で差が閉の閾値よりも大きいか小さいかを判定する。
最大値と最小値の差が閉の閾値よりも大きいと、シンチレーションが大きいと判断し、S16で絞り機構を閉じる方向に動かす。差が閉の閾値よりも小さく、開の閾値よりも大きい場合は、絞り機構の口径の設定が最適と判断しS17では開閉を行わない。差が開の閾値も小さい場合は、シンチレーションが小さいと判断しS18で絞り機構を開ける方向に動かす。
(もっと読む)
レーザ通信のための捕捉、指示、および追跡アーキテクチャ
自由空間のレーザ通信システムにおける端末の捕捉および追跡のための技術は、端末の間でビーコンレーザビームを交換し、ビーコンレーザビームの検出からのフィードバックに基づいて、端末によって交換されたデータレーザビームがステアされるように、端末を捕捉ひいては追跡することを含んでいる。捕捉のために用いられるビーコンレーザビームは、追跡のために用いられるビーコンレーザビームよりも大きな拡がりを有する。ジンバルは、データレーザビームの大雑把なステアリングを提供し、ステアリングミラーは、精密なステアリングを提供する。RFリンクを介して交換されるGPS位置データは、捕捉のために、ビーコンレーザビームの初期の指示のために用いられ得る。ビーコンレーザビームは、全ての端末が同じビーコン波長を用いることができるようにチョップされ、異なるチョッピング周波数によって区別される。  (もっと読む)
(もっと読む)
レーザエネルギおよび情報供給システム
【課題】遠隔装置のシステムの簡素化、小型化、軽量化・省電力化とレーザーシステムの簡素化、省力化を達成することができるようにすることである。
【解決手段】カイトプレーン100は、太陽電池パネル101によってレーザシステム200からのレーザ光を受光して電気に変換し、制御信号用受光器102によってレーザ光から制御信号を取得し、強誘電体フィルタ104によってコーナリフレクタ103で反射されたレーザ光の一部に画像データを乗せる。レーザシステム200は、制御データ用変調回路202によって、レーザ装置201が出射したレーザ光の一部に制御信号を乗せ、反射光検出装置203によって、コーナリフレクタ103で反射されて画像データが乗ったレーザ光から画像データを取得する。
(もっと読む)
照明光通信装置
【課題】移動機と照明器具との間で適正かつ効率的な光学系を形成する。
【解決手段】照明光側受光器13は、受光センサ14、および、3つのパイロット光源16A,16B,16Cから構成される。パイロット光源16A,16B,16Cでパイロット光発光素子群16を構成する。パイロット光源16A、受光センサ14、パイロット光源16Cは、それぞれの中心点が仮想直線L1上に位置し、パイロット光源16Cはその中心点が、仮想直線L1と直交する仮想直線L2上に位置する。本構成によって、照明側の受光センサの位置・方向を移動機側から容易に決定でき、移動機と照明器具との間で適正かつ効率的な光学系(光軸、輝度設定など)を形成することが可能となる。
(もっと読む)
光受信装置
【課題】
光軸ずれがあっても、迅速に光軸を合わせられる簡易な構成の光受信装置を実現する。
【解決手段】
ハーフミラー12は信号光ビーム10を2分割する。一方の分割光10aは、レンズ14を介して受光素子16に入射する。受光素子16はXYステージ18上に載置されている。他方の分割信号光ビーム10bは、互いに異なる光学距離で、エリアセンサ26,30に入射する。ビーム重心検出装置32は、エリアセンサ26,34の入射ビームのビーム中心(重心)を検出する。制御装置36は、ビーム重心検出装置32,34の位置出力から、信号光ビーム10aのXYステージ18上での入射位置(X0,Y0)を計算し、その位置(X0,Y0)に受光素子16が位置するように、X駆動回路38及びY駆動回路40によりそれぞれX軸アクチュエータ20及びY軸アクチュエータ22を駆動する。
(もっと読む)
光空間通信装置
【課題】光軸外れが発生する可能性を低減する。
【解決手段】Z方向は自装置51の駆動機構が中点位置にある場合の相手側装置52に向けた光ビームLの方向を示している。初期調整モードでの光軸ずれ補正機構の垂直方向の光ビーム放射方位角駆動範囲は角度B1、通常運用モードでの垂直方向の駆動範囲は角度B2であり、B1<B2の関係にある。また、自装置51の駆動機構が中点位置にある場合の光ビームLのZ方向は角度B1と角度B2の中心に設定される。角度B3は通常運用モード時の自装置から角度B1を越えた上向き部分の駆動範囲であり、角度B4は角度B1を越えた下向き部分の駆動範囲であり、B2=B1+B3+B4の関係となる。 これにより、設置後に何らかの要因により自装置51が傾いた場合でも、初期設置時に光軸ずれ補正可能な角度B3、B4が確保できているため、その範囲以内であれば自動追尾動作を継続することができる。
(もっと読む)
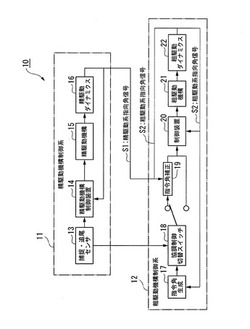
光無線伝送装置
【課題】光ビーム送受信機では、光ビームの放射角が非常に狭いので、いったん光軸を見失うと、自動追尾は不可能になる。
【解決手段】主信号送受信用の第1の光ビーム送受信機10と、光軸調整用の第2の光ビーム送受信機20と、これらを一体に支持したフレーム50を備える。このフレーム50を転動させて、第1の光ビーム送受信機10と第2の光ビーム送受信機20の光軸を同時に調整する光軸調整機構51とを備える。第2の光ビーム送受信機20の送信部光学系は、第1の光ビーム送受信機10の送信部光学系よりも広い光ビームの放射角を有し、第2の光ビーム送受信機20の受信部光学系は、第1の光ビーム送受信機10の受信部光学系よりも広い光ビームの視野角を有し、第2の光ビーム送受信機20の受信部光学系は、第1の光ビーム送受信機10の受信部光学系よりも、波長帯域が広くて、互いに異なる波長の光ビームを使用する。
(もっと読む)
1 - 20 / 47
[ Back to top ]