
Fターム[5L096CA04]の内容
Fターム[5L096CA04]に分類される特許
201 - 220 / 2,764
追尾装置
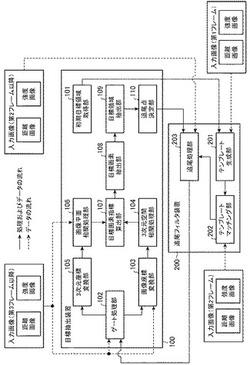
【課題】テンプレートマッチングと比べて目標領域の抽出精度の向上および抽出処理負荷の低減を図ることのできる追尾装置を得る。
【解決手段】目標抽出装置100は、追尾フィルタ装置200が出力した追尾予測値と新規入力画像各画素との間で、3次元空間上と画像平面上の、次元の異なる2種類の相関処理を実行し、これらの相関値から新規入力画像中の目標画素および目標領域を抽出し、追尾フィルタ装置200への入力となる新規画像上の追尾点を決定する。追尾フィルタ装置200は、目標抽出装置100が出力した追尾点に基づいて、3次元空間上での追尾点の位置、速度、強度の予測を行い、次のフレームの追尾予測値として出力する。
(もっと読む)
電子機器及び抽出方法

【課題】動画像から、ある動きをする物、人、動物などを簡便に抽出する。
【解決手段】電子機器1は、オブジェクトの動きを表現するリズム情報の類似度に基づいて動画像からオブジェクトを抽出する電子機器であって、オブジェクトの抽出に用いる抽出用リズム情報を取得する抽出用リズム情報取得部40と、抽出用リズム情報取得部40によって取得された抽出用リズム情報と、動画像内のオブジェクトのリズム情報との類似度を算出する算出部60と、算出部60によって算出された抽出用リズム情報との類似度が所定の閾値以上であるリズム情報として当該動きが表現されているオブジェクトを動画像から抽出する抽出部70とを備える。
(もっと読む)
映像におけるカメラモーション解析のための方法及び装置
【課題】映像におけるカメラモーション解析のための方法等を提供する。
【解決手段】方法は、映像から、有意な移動特性を有する映像セグメントと、有意な移動特性を有さない映像セグメントとを解析し、有意な移動特性を有さない映像セグメントの夫々について、先行する隣接映像セグメントに対応する第1のモーションタイプが後続の隣接映像セグメントに対応する第2のモーションタイプとは異なっている場合に、第1のモーションタイプ及び第2のモーションタイプの検出基準を下げ、有意な移動特性を有さない映像セグメントが、下げられた検出基準を満たすかどうかを判断し、判断結果に従って有意な移動特性を有さない映像セグメントを隣接する映像セグメントとマージすることを含む。本発明の実施形態に従って、映像におけるカメラのモーションタイプは、より効率的且つ正確に検出可能であり、ユーザの撮影意図は、より正確に反映可能である。
(もっと読む)
物体検出方法、物体検出装置および物体検出プログラム
【課題】昼夜の時間帯や天候などの環境変動に如何に関わらず、道路上の落下物を高精度で検出することが可能な物体検出装置を提供する。
【解決手段】検出波長が互いに異なる第1,第2カメラにより撮影した画像をそれぞれの取得画像として取得する第1,第2画像取得手段1,5と、各前記取得画像から道路上の物体の存在を判定する第1,第2物体存在判定手段2,6と、各前記取得画像から道路上の物体の移動状態を検出し、静止物体と移動物体とを判別する第1,第2移動体検出手段3,7と、各前記取得画像から道路上の物体の立体情報を算出する第1,第2立体情報算出手段4,8と、第1,第2物体存在判定手段2,6、第1,第2移動体検出手段3,7、第1,第2立体情報算出手段4,8それぞれにおける処理結果を統合する特徴量統合手段9と、特徴量統合手段9における処理結果の特徴量により落下物の判定を行う落下物判定手段10と、を少なくとも備える。
(もっと読む)
計測装置,計測方法および計測プログラム
【課題】 レーザレンジファインダで複数の対象を計測して多様な情報を得る。
【解決手段】 計測装置(10)は、スキャン面(Scn)が水平面に対して傾斜したLRF(14)で複数の対象(T1,T2,…)を計測する。計測装置のコンピュータ(12)は、ステップS1で複数の対象に関する3次元形状モデル(M1,M2)をデータベース(50)に登録し、その後、ステップS3でLRF14を制御してスキャン面の水平面に対する傾斜角(α)を変化させつつ、ステップS5〜S19(およびS21〜S39)で複数の対象それぞれのパーティクルフィルタ(38a,38b,…)を用いてLRF14からの計測データと3次元形状モデルとの比較を行うことにより複数の対象それぞれの3次元形状および姿勢、特に人の体の方向および頭の方向を少なくとも推定する。
(もっと読む)
ビデオにおけるカメラ動きの型を検出する方法および装置
【課題】ビデオにおけるカメラの動きの型をより効果的かつ精確に検出するよう、ビデオにおけるカメラ動きの型を検出する方法および装置を提供する。
【解決手段】本発明の諸実施形態は、ビデオにおけるカメラ動きの型を検出する方法および装置を開示する。該方法は:ビデオにおける隣接するフレームどうしの間の第一のズーム動きパラメータを推定する段階と;前記第一のズーム動きパラメータが第一の事前設定条件を満たす場合に、対応するビデオ・セグメントにおいて事前設定された数の間隔をもつフレームどうしの間の第二のズーム動きパラメータを推定する段階と;前記第二のズーム動きパラメータが第二の事前設定条件を満たす場合に、前記ビデオ・セグメントのカメラ動きの型を、ゆっくりしたズームとして識別する段階とを含む。
(もっと読む)
視線方向の推定装置、視線方向の推定方法およびコンピュータに当該視線方向の推定方法を実行させるためのプログラム
【課題】顔の向きの制限を緩和して、比較的少数のカメラにより、観測範囲内の任意の位置における被測定対象者の視線方向のリアルタイムに推定し追跡する視線方向の推定装置を提供する。
【解決手段】第2の頭部位置・姿勢推定部5612は、撮影できている複数のカメラからの画像データを統合して処理することにより、頭部の位置および頭部の姿勢の推定処理を実行する。処理対象となっている画像フレーム以前に獲得されている眼球の3次元モデルに基づいて、眼球中心推定部5614は、処理対象の特定人物の眼球中心の3次元的な位置を推定する。虹彩中心抽出部5616は、虹彩の中心の投影位置を検出する。視線方向推定部5618は、抽出された虹彩の中心の投影位置である画像フレーム中の2次元的な位置と、推定された眼球の3次元的な中心位置とに基づいて、視線方向を推定する。
(もっと読む)
物体検出装置
【課題】ユーザーによるモーション操作の検出精度を向上する。
【解決手段】所定のフレームレートで逐次撮影し、撮影画像を取得する撮影部と、前記撮影部で撮影する際の照明光を発光する照明部と、前記照明部が第1光強度と前記第1光強度よりも小さい第2光強度とを選択的に発光するように切換制御する制御部とを備える。
(もっと読む)
情報処理装置、情報処理方法、及び、プログラム
【課題】エージェントがアクションを行う環境中の物体の学習を、容易に行う。
【解決手段】分離学習モデルは、画像の背景のモデルである背景モデルと、背景上を移動可能な、画像の前景のモデルである1以上の前景モデルとを有する。背景モデルは、背景の見えを表す背景見えモデルを有する。1以上の前景モデルのうちの少なくとも1つは、前景に対応する物体が行うアクションによって、背景上の前景の位置に対応する状態が遷移する、アクションごとの遷移確率と、前景の見えを表す前景見えモデルとを有する。以上のような分離学習モデルの学習が、物体が行うアクションと画像の観測値とを学習データとして用いて行われる。本技術は、例えば、物体を操作するエージェントの学習を行う場合等に適用できる。
(もっと読む)
移動物体監視システム
【課題】進入監視エリアに対する物体の移動を効果的に検知して、小さな処理負担で移動物体を監視できる移動物体監視システムの提供。
【解決手段】カメラの撮影視野内で進入監視エリアの外側に任意に設定される第1指標帯の画像領域である第1画像領域と、この第1指標帯との間に任意に設定される第2指標帯の画像領域である第2画像領域を撮影画像から抽出する画像抽出部と、第1・第2画像領域の画像特徴量である第1・第2画像特徴データを算定する特徴量算定部と、第1・第2画像特徴データに基づいて進入監視エリアに対する物体移動を評価するための物体移動評価データを演算する評価データ演算部と、物体移動評価データの経時変化に基づいて進入監視エリアへの物体の進入又は退出あるいはその両方を推定する物体移動推定部とが備えられている。
(もっと読む)
物体検出システム、物体検出方法、及びプログラム
【課題】小さい物体の検出と高速に移動する物体の検出とを両立することを目的とする。
【解決手段】第一の物体検出手段と第二の物体検出手段と通信手段とを有するシステムで、第一の物体検出手段は、画像から規定の物体を検出し、通信手段は、画像の解像度が異なる画像、及び第一の物体検出手段で検出された物体の画像を第二の物体検出手段に送信し、第二の物体検出手段は、異なる画像から物体とは異なる他の物体を検出することによって課題を解決する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】、一連の動作を撮像した複数の画像から適切な状態となる画像を自動的に特定すること。
【解決手段】画像取得部51は、被写体の動きが連続的に撮像された複数の画像のデータを取得する。差分画像生成部54は、複数の画像のデータから、隣接した画像間の差分画像のデータを夫々生成する。強調画像生成部55は、差分画像のデータから、演算処理のための画像のデータを生成する。ハフ変換部562は、強調画像生成部55により生成された画像のデータを処理対象として演算処理(ハフ変換処理)を実行する。角度決定部151は、ハフ変換部562による演算結果に基づいて、被写体の動きの軌跡から変化点を特定する。
(もっと読む)
画像処理装置および方法、プログラム、並びに記録媒体
【課題】より少ない仮定かつより少ない演算量で学習型画像処理を行うことができるようにする。
【解決手段】時刻sの画像特徴量に対して、前記画像の中の前景の画像の画像特徴量をパラメータとして有する前景のビューモデルに対して、幾何的な変換であるビュー変換を施すことで、時刻sの前景の画像を推定して推定前景ビューを出力し、時刻sの画像特徴量に対して、前記画像の中の背景の画像の画像特徴量をパラメータとして有する背景のビューモデルに対して、幾何的な変換であるビュー変換を施すことで、時刻sの背景の画像を推定して推定背景ビューを出力し、前記推定前景ビューおよび前記推定背景ビューを合成した合成ビューと、時刻sの画像特徴量を比較することで得られる評価値に基づいて、前記前景のビューモデルのパラメータを確率的生成モデルに基づいて更新することで前記前景と背景のビューモデルとを学習する。
(もっと読む)
物品検出装置および静止人物検出装置
【課題】持ち込み物品を効果的に検出する。
【解決手段】物品検出装置は、監視領域を撮影した監視画像を順次取得する撮像部20と、監視領域の背景が撮影された背景画像と人物の外形を模した人物モデルを記憶する記憶部21と、静止している物品を検出する制御部22と、を具備する。制御部22は、監視画像と背景画像から変化領域を抽出する変化領域抽出手段220と、変化領域に前記人物モデルを重ね当該変化領域の内側でかつ当該人物モデルの外側である物品領域の特徴を記憶部21に記憶する物品領域抽出手段222と、順次取得された画像にて変化領域を時間的に追跡し変化領域が静止しているかを判定し静止物体領域を検出する静止物体領域検出手段223と、静止物体領域が検出されると、静止物体領域が前記物品領域の特徴を有するかを判定し物品領域の特徴を有する場合に当該静止物体領域が物品であると判定する異常判定手段224とを有する。
(もっと読む)
対象物追跡装置および対象物追跡システム
【課題】撮像画像中の対象物の追跡をより確実に行うことを可能にする。
【解決手段】テンプレートマッチングが成功して先行車両の追跡が継続されるごとに、新規追跡画像を重ねて合成していくことで新たに合成画像を生成していくとともに、新たに合成画像を生成する場合には、過去合成画像に追跡の継続回数に応じた重みを付けながら、新規追跡画像を重ねてさらに合成していく画像重畳合成部25と、画像重畳合成部25で生成された合成画像に対してエッジ検出を行って、先行車両の端部の位置を決定する車両端決定部27と、車両端決定部27で決定した端部の位置をもとに、テンプレートを更新するテンプレート更新部28とを備え、テンプレートを更新した場合は、更新後のテンプレートとのテンプレートマッチングを繰り返すことで先行車両の追跡を行う。
(もっと読む)
飛び出し歩行者判定装置及びプログラム
【課題】自車両の進路に飛び出す危険性が高い歩行者が存在するか否かを精度良く判定するようにする。
【解決手段】エッジ抽出部22によって、複数の撮像画像の各々からエッジを抽出し、輪郭線生成部24によって、各撮像画像について、エッジのピーク点が画像上方へ向かって連続する歩行者候補の輪郭線を生成する。対応輪郭線検索部28によって、各撮像画像において対応する輪郭線を検索し、移動量推定部30によって、対応する輪郭線のペアの各々について水平方向の移動量を算出する。グルーピング部32によって移動量に基づいて、輪郭線を、複数の輪郭線群に分類する。グループサイズ算出部34によって、各輪郭線群について、高さ方向の大きさを算出する。飛び出し判定部36によって、各輪郭線群についての移動量と高さ方向の大きさとに基づいて、自車両の進路に飛び出す危険性が高い歩行者が存在するか否かを判定する。
(もっと読む)
画像処理装置および方法、記録媒体並びにプログラム
【課題】軽い負荷で画像をトラッキングすることができるようにする。
【解決手段】トラッキングの対象であるオブジェクトを含む対象画像と、所定のフレームの対象画像と比較される比較領域の画像である比較画像との、第1の特徴量のマッチング度と第2の特徴量のマッチング度を所定の混合率で混合して得られる信頼度の、混合率を変化させた場合の和で表される評価値が計算され、評価値が最大になるときの混合率が求められる。評価値が最大になるときの混合率が設定された信頼度に基づいて対象画像に対応する画像が検出される。
(もっと読む)
画像処理装置
【課題】監視画像から背景画像を生成する画像処理装置において、監視空間内に似た色の服を着た人物が多く往来していたり、滞留する人物がいたりすると、生成した背景画像の一部に人の画素値が混入することがあった。
【解決手段】背景モデル生成部は、注目時刻より過去の入力画像の画素値から、注目画素300の特徴量の頻度分布330を生成し、当該頻度分布からなる背景モデルを生成する。背景特徴選出部は、注目画素300、近傍画素320の頻度分布330,340において集中度が最大ピークとなる正規分布331,342をそれぞれの画素の位置での背景特徴量として抽出する。背景モデル修正部は、注目画素300の頻度分布330のうち、近傍画素320の背景特徴量として選出される正規分布342に対応するものである正規分布332の頻度を高める修正を行う。
(もっと読む)
情報処理装置および情報処理方法、記録媒体、並びにプログラム
【課題】対象を迅速に追跡できるようにする。
【解決手段】物体認識部は、画像から認識物体を認識する。予測部は、認識物体の次の位置および形状を予測する。そして、物体認識部は、予測部により予測された位置に対応する画像の領域内から予測された形状の認識物体を認識する。本開示は、例えば情報処理装置に適用できる。
(もっと読む)
接近物体検知装置及び接近物体検知方法
【課題】低い処理負荷で、自車両と接近物体の位置関係及び自車両が移動しているか否かによらず、接近物体を検知できる接近物体検知装置を提供する。
【解決手段】接近物体検知装置は、異なる時刻に撮像部(2)により取得された車両(10)の周囲を撮影した二つの画像から特徴点を抽出する特徴点抽出部(432)と、その二つの画像間で同一の物体に関する特徴点からその物体の画像上の観測移動ベクトルを求める観測移動ベクトル算出部(435)と、撮像部(2)の移動に起因する各特徴点に対応する物体の見かけの移動ベクトルの最小値を算出する最小見かけ移動ベクトル算出部(434)と、特徴点ごとに観測移動ベクトルから見かけの移動ベクトルの最小値を減じて補正移動ベクトルを算出する移動ベクトル補正部(436)と、その補正移動ベクトルに対応する物体が車両(10)に接近する移動物体か否か判定する判定部(437)とを有する。
(もっと読む)
201 - 220 / 2,764
[ Back to top ]