
Fターム[5L096EA04]の内容
Fターム[5L096EA04]に分類される特許
1 - 20 / 59
コーナー検出装置
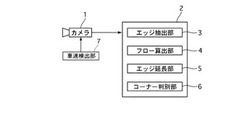
【課題】 撮像状況によって分離して抽出された2つのエッジ間に存在するコーナーを検出できるコーナー検出装置を提供する。
【解決手段】 車両に搭載し、周囲環境を画像として撮像するカメラ1と、撮像された画像に対し、2方向以上の直線エッジ成分を抽出するエッジ抽出部3と、各エッジを構成する画素に対して、エッジの直交方向の速度であるフローを算出するフロー算出部4と、エッジ端をエッジ方向(エッジの延びる方向)に延長するエッジ延長部5と、延長されたエッジに基づき、方向の異なるエッジ同士の交点をコーナーとして判別するコーナー判別部6と、を備え、エッジ延長部5は、延長した先に同じ大きさを有するフローが存在する場合、延長を有効と見なして再線化する。
(もっと読む)
被写体追跡プログラムおよび被写体追跡装置

【課題】時系列に入力されるフレーム画像において適切に主要被写体を追跡すること。
【解決手段】被写体追跡プログラムは、時系列で入力される各フレーム画像の色情報および輝度情報に基づいて複数の要素画像を生成する要素画像生成処理と、複数の要素画像をそれぞれ2値化して複数の2値化要素画像を生成する2値化要素画像生成処理と、複数の2値化要素画像を論理積演算する論理積演算処理と、論理積演算後の2値論理積画像に対するラベリング処理に基づいて、各フレーム画像における主要被写体の位置を特定する特定処理と、特定処理で特定された範囲と所定範囲との論理積演算に基づいて特定された範囲を縮小する縮小処理と、前フレーム画像において縮小処理で縮小された範囲を膨張させて所定範囲を得るモルフォロジー処理と、をコンピュータに実行させる。
(もっと読む)
一時停止線検出装置及びプログラム
【課題】一時停止線以外の白線の誤検出を防止して、一時停止線を精度良く検出する。
【解決手段】画素距離変換部20で、画像入力部18により取得した入力画像を2値化し、画素値を画素距離に変換した画素距離画像を生成する。交差パターン検出部22で、画素距離画像を用いてレーンマークを追跡して、レーンマークと水平方向に伸びる白線との交点を検出する。探索領域設定部24で、交点近傍領域を一時停止線を検出するための探索領域に設定し、一時停止線判定部26で、探索領域内の白線の芯線を抽出し、抽出された芯線が直線状かつ所定の長さ以上の場合に、芯線に対応する白線を一時停止線と判定する。
(もっと読む)
把持物体認識装置、把持物体認識方法、及び把持物体認識プログラム
【課題】撮影等により得られた映像や画像に含まれる人物が把持する把持物体等を高精度に認識する。
【解決手段】映像又は画像に含まれる人物が把持している物体を認識する把持物体認識装置において、前記映像又は画像に含まれる少なくとも1人の人物の人体領域を検出する人体領域検出手段と、前記人体領域検出手段により得られる人体領域から手先領域を検出する手先検出手段と、前記手先検出手段により得られる手先領域に対応した手先の位置情報に基づいて、把持物体を検出する把持物体検出手段とを有することにより、上記課題を解決する。
(もっと読む)
部位認識装置、部位認識方法、及び部位認識プログラム
【課題】映像や画像に含まれる人物の部位等を高精度に認識する。
【解決手段】映像又は画像に含まれる人物の部位を認識する部位認識装置において、前記映像又は画像に含まれる少なくとも1人の人物の人体領域を検出する人体領域検出手段と、前記人体領域検出手段により得られる人体領域から所定の部位を認識する部位認識手段とを有し、前記部位認識手段は、前記人体領域検出手段により得られる人体領域の画像のうち、予め設定された形状と一致する領域を、前記形状に対応して設定された前記所定の部位として認識することにより、上記課題を解決する。
(もっと読む)
姿勢推定装置および姿勢推定プログラム
【課題】人物の撮影画像から姿勢または動きを推定する際に対応するCG画像との照合の精度を高める。
【解決手段】姿勢推定装置1は、撮影画像と、当該撮影画像中の人物に対応して生成されたCG画像とを入力し、撮影画像からオブジェクトの特定領域を2値化したシルエットを抽出すると共に、CG画像から同様に特定領域を2値化したシルエットを抽出する特定領域抽出手段31と、抽出されたそれぞれのシルエットに細線化処理を施す細線化手段32と、細線化されたそれぞれのシルエットに膨張処理を施す膨張処理手段33と、膨張させたそれぞれのシルエットに距離変換を施すことで濃淡画像を生成する距離変換手段34と、それぞれの濃淡画像の特徴量としてHOGを算出する勾配特徴量抽出手段35と、撮影画像から算出されたHOGとCG画像から算出されたHOGとを照合することで、撮影画像中のオブジェクトの関節角度を推定する照合手段4とを備える。
(もっと読む)
人体姿勢推定装置、人体姿勢推定方法およびコンピュータプログラム
【課題】人を撮像しながら実時間での人体姿勢推定処理を効率的に行うことを図る。
【解決手段】ビデオフレームに写っている人のポーズを推定し、推定したポーズに基づいて該ビデオフレームよりも後のビデオフレームのポーズを推定し、推定結果のポーズをビデオフレームの人物画像に重ね合わせて表示パネル上に表示する表示データを出力するポーズ追跡部14と、感知データに基づいてユーザがどのような所定の操作を行ったのかを判断する操作判断部11と、ポーズ修正開始の操作に応じて初期ポーズをビデオフレームの人物画像に重ね合わせて表示パネル上に表示する表示データを出力する初期ポーズ提示部12と、ポーズ修正操作に応じて初期ポーズを修正するポーズ修正部13と、を備え、ポーズ追跡部14は、該修正結果のポーズに基づいて、ポーズ修正開始の操作が行われた時刻以降のビデオフレームに対してポーズを推定する。
(もっと読む)
画像処理装置、画像処理方法、および画像処理プログラム
【課題】対象画像から対象物の輪郭エッジを精度良く検出すること。
【解決手段】本発明のある実施の形態の画像処理装置1は、粘膜構造を撮像した管腔内画像の画素値をもとに、各画素の勾配強度を算出する勾配強度算出部16と、各画素の勾配強度をもとに輪郭候補エッジ位置を検出する候補エッジ検出部17と、各画素の勾配強度をもとに、輪郭候補エッジ位置の中から輪郭エッジ位置を選択する際に参照する参照範囲を設定する参照範囲設定部18と、参照範囲内の輪郭候補エッジ位置の中から1つを選択し、輪郭エッジ位置とする輪郭エッジ選択部19とを備える。
(もっと読む)
クロスマーク検出装置及び方法、並びにプログラム
【課題】テンプレートに頼らず、各画素の周囲の輝度の変化を検出することで、安定したクロスマークの検出を行う。
【解決手段】クロスマーク検出装置は、画像中の各点についてクロスマークの中心を判定して、クロスマーク候補点画像とするクロスマーク候補画像作成手段と、クロスマーク候補画像を太線化し、領域分割して近傍にあるクロスマーク候補点に同じ領域番号を付与した領域画像を出力するクロスマーク候補画像太線化手段と、クロスマーク候補点に対して近傍の輝度情報を使って二直線の交点としてクロスマーク中心座標を計算するクロスマーク中心座標計算手段と、同一の領域番号を持つ点の中で最大のスコアを持つ点を領域の代表点としてクロスマークの中心であると判定する代表点採用手段とから成る。
(もっと読む)
線画処理装置、線画処理方法およびプログラム
【課題】描画線に基づいた領域分離を高精度に実施することを容易とする技術を提供する。
【解決手段】線画処理装置100は、線画から芯線CL1を抽出する芯線抽出部21と、芯線CL1の端点TP1を抽出する端点抽出部22と、端点TP1から延長線ELを延伸させる延伸方向EDとして、前記端点まで続く芯線CL1の描画方向DDに基づいて、端点TP1から射出させる射出方向SDと、射出方向SDに射出された延長線EDを所定方向に湾曲させる湾曲方向CDとを決定する延伸方向決定部24とを備える。
(もっと読む)
画像処理装置および画像処理方法
【課題】画像から特定形状を高速に検出することができる画像処理装置を開示する。
【解決手段】この画像処理装置において、候補位置算出部(106)は、与えられた画像から、検出対象の形状に含まれる3辺に3点で接する第一の円の中心点の第一の候補位置を求める。角度算出部(106)は、前記3辺から前記第一の候補位置への法線と、前記法線と各辺が交わる点を通る一定方向の基準線との角度を求める。相対関係算出部(106)は、前記第一の候補位置に関する前記角度の相対関係を求める。認識部(108)は、前記角度の相対関係と、予め格納された形状の角度の相対関係とから、前記与えられた画像に含まれる形状を認識する。
(もっと読む)
サインに基づくマンマシンインタラクション
【課題】人間のサイン及びジェスチャのコンピュータ視覚認識に基づくヒューマンコンピュータインタラクション方法を提供する。
【解決手段】人間の検出、人間のボディパーツ検出、手形状分析、軌道分析、向き決定、ジェスチャマッチング等を含む。形状及びジェスチャの多くの型が、コンピュータビジョンに基づく煩わしくない様式で認識される。多くのアプリケーションが、家電の遠隔制御、コンピュータ制御装置のマウスレス(及びタッチレス)操作、ゲーミング及び他方に命令を与えるための人間−ロボットコミュニケーションを含むこのサイン理解技術により実現可能となる。動的な検出ハードウェアが、ビデオレートでの深度画像のストリームを取得するために用いられ、深度画像のストリームは、情報抽出のために順次分析される。
(もっと読む)
情報処理装置、ブロック検出方法およびプログラム
【課題】ハフ変換が施された画像のデータ量を削減することが可能な、情報処理装置、ブロック検出方法およびプログラムを提供すること。
【解決手段】本発明に係る情報処理装置は、生体に固有な画像情報である生体画像に対してハフ変換を実行するハフ変換部と、所定の形状を有するブロックが、ハフ変換後の生体画像であるハフ空間画像の中に含まれているか否かを検出し、前記ブロックが前記ハフ空間画像中に含まれている場合に前記ハフ空間画像中における前記ブロックの存在位置を表す存在位置情報を出力するブロック検出部と、を備える。
(もっと読む)
画像を用いた移動物体検知装置
【課題】画像を拡大中にも画像内での移動物体の存否を検出し、画像の拡大中にも画像内での移動物体の有無を確認できるようにした画像を用いた移動物体検知装置を提供する。
【解決手段】撮像手段10は、対象空間を時間経過に伴って連続的に撮像する。撮像手段10により撮像された画像からエッジ画像が生成され、エッジ画像はエッジ画像記憶部13に格納される。論理演算部14aおよび移動判定部15aは、エッジ画像を3枚ずつ用いてシルエットマッチングを行い画像の中で移動領域を抽出する。移動領域が抽出されると、拡大画像生成部16において移動領域を含む部分領域を1画面の大きさに拡大した拡大画像を生成する。論理演算部14bおよび移動判定部15bは、少なくとも3枚の拡大画像が得られるまでの期間は、時系列において隣接する2枚ずつの拡大画像の差分画像により移動領域の存否を検出する。
(もっと読む)
白線検出装置
【課題】演算量を低減させることができ、かつ、誤検出を防止することができる白線検出装置を提供する。
【解決手段】カメラ1による撮像画像を俯瞰処理部2が俯瞰画像に変換し、俯瞰画像は区分線により複数の区画に区分されて表示部3に表示される。そして、複数の区画のうち一部の区画を選択する操作が選択操作部13に入力されると、切出し部14が、画像処理部4において画像処理が行われた後の画像全体から、選択された区画に対応した画像部分を切り出す。さらに、白線認識部9が、この画像部分について白線認識を行ない、テンプレート作成部10が認識された白線に基づいてテンプレートを作成し、テンプレートマッチング部11が画像全体についてテンプレートに表された白線に対して平行な白線の検出を行ない、検出白線出力部7により検出され白線が表示部3に表示される。
(もっと読む)
車両運転支援装置および車両運転支援方法
【課題】自車両の前端部に対する左右の側方の領域の状況を簡便かつ適切に確認することができる「車両運転支援装置および車両運転支援方法」を提供することを目的とするものである。
【解決手段】車載カメラ11の撮影映像3に含まれる物体に対する車両の姿勢を検出する姿勢検出装置17と、この姿勢検出装置17の検出結果に基づいて、車両の姿勢にかかわらずに状況確認に必要とみなされる領域を含み、物体の角度が表示状態において互いに左右対称となるような第1の画像1および第2の画像2を生成する画像生成装置18と、この画像生成装置18によって生成された画像1,2を合成して表示部14に表示する画像合成装置20とを備えたこと。
(もっと読む)
検出候補の近傍排除処理機能を有する画像処理装置及び画像処理プログラム並びにコンピュータで読み取り可能な記録媒体
【課題】近傍排除処理を適切に実行できるようにする。
【解決手段】サーチ手段で実行されたサーチの結果得られる複数の検出候補中から、所定の基準で基準候補を選択するための基準候補選択手段と、前記基準候補選択手段で選択された基準候補に類似する検出候補を排除するための近傍排除条件として、前記基準候補と任意の検出候補との距離の閾値として予め設定された近傍排除距離と、所定の手法で決定された前記基準候補の基準角度と、任意の検出候補の基準角度との角度差の閾値として予め設定された近傍排除角度と、前記基準候補の姿勢を、前記基準角度に基づいて変化させて、任意の検出候補との角度差を2以上得るための角度変化量と、に基づき、前記基準候補の姿勢を前記角度変化量に従い2以上に変化させた各姿勢毎に近傍排除角度を算出し、該近傍排除角度及び前記近傍排除距離を共に満たす検出候補を排除可能な検出候補排除手段とを備える。
(もっと読む)
画像処理装置、画像処理方法およびプログラム
【課題】 画像の中から画素値が急激に変化する点を特徴点として抽出し、この特徴点及び/又は特徴点に関する情報を用いて画像処理をするシステムにおいて、コーナから抽出した特徴点と、コーナと比べて抽出される再現性の低いコーナ以外のエッジから抽出した特徴点との区別をしていなかった。
【解決手段】 入力画像からエッジを抽出し、エッジからセグメントを抽出し、セグメントごとに勾配方向を計算して勾配方向グラフを生成し、この勾配方向グラフを調べて勾配方向の変動点を特徴点として抽出するようにした。
(もっと読む)
画像のデータ圧縮方法、画像処理におけるパターンモデルの位置決め方法、画像処理装置、画像処理プログラム及びコンピュータで読み取り可能な記録媒体
【課題】十分な特徴量を残しつつ、縮小率を高めて処理の高速化を図る。
【解決手段】予め登録された登録画像に対応するパターンモデルを、サーチ対象画像中からサーチして位置決めを行う画像処理におけるパターンモデルの位置決めにおいて、画像のデータを圧縮するデータ圧縮方法であって、画像を構成する各画素に対して、エッジ強度情報を含むエッジ強度画像及びエッジ角度情報を含むエッジ角度画像を演算する工程と、各画素毎のエッジ角度画像につき、予め規定された一定幅の角度を示すエッジ角度ビットで表現したエッジ角度ビット画像に変換する工程と、エッジ角度ビット画像を圧縮して、エッジ角度ビット毎に和をとったエッジ角度ビット縮小画像を作成する工程とを含む。これにより画像を縮小後もエッジ角度情報が維持されるので、サーチの精度を維持しつつデータ量を縮小したサーチの高速化を実現できる。
(もっと読む)
物体検出装置及び物体検出方法
【課題】立体物を正確に検出する物体検出装置を提供する。
【解決手段】車載のカメラ10と、物体の撮像画像の情報に基づいて各画素の移動情報を算出する移動情報算出部20と、移動情報に基づいて物体を検出する検出部30とを備え、検出部30は、移動情報に基づいて、移動情報の共通する画素が縦方向に連続する第1特徴領域を抽出し、移動情報に基づいて、移動速度の共通する画素が所定角度の方向に沿って連なる第2特徴領域を抽出し、第1特徴領域が第2特徴領域の間に位置する場合は、第1特徴領域と第2特徴領域を含む領域に対応する物体は立体物であると判定する。
(もっと読む)
1 - 20 / 59
[ Back to top ]