
Fターム[5L096EA15]の内容
イメージ分析 (61,341) | 前処理 (3,379) | 正規化 (765) | 位置の正規化(位置合わせ) (432) | 平行移動するもの (60)
Fターム[5L096EA15]に分類される特許
21 - 40 / 60
顔認証システム

【課題】量子化誤差による影響を受け難くすることのできる顔認証システムを提供する。
【解決手段】撮像手段1と、顔検出手段2と、顔領域の画像から認証に用いる画像のサイズ及び角度に合わせて正規化切り出し画像A,Bを切り出す切り出し条件を各々変更して複数の正規化切り出し画像A,Bを切り出す切り出し手段4と、切り出し手段4における切り出し条件を変更する切り出し条件変更手段5と、複数の正規化切り出し画像A,Bの各々から濃度勾配画像を生成する濃度勾配画像生成手段6と、複数の濃度勾配画像から1枚の認証用画像を生成する認証用画像生成手段8と、認証用画像を用いて顔認証を行う認証手段10とから構成される。
(もっと読む)
立体物検出装置およびその方法

【目的】単眼カメラによる撮影画像に影が存在する場合においても、影を立体物と誤認識せず、立体物を正確に検出できるようにし、接触事故や人身事故を防止する「立体物検出装置およびその方法」を提供することにある。
【構成】単眼カメラにより任意の時刻t1と該時刻t1より所定時間経過した時刻t2におけるそれぞれの撮影画像を視線変換した俯瞰画像を取得し、一方の俯瞰画像を自車の移動量に基づいてシフトしたシフト画像とシフトしていない俯瞰画像との第1差分画像を算出し、該時刻t1およびt2の自車影画像を算出し、一方の自車影画像を自車の移動量に基づいてシフトしたシフト影画像とシフトしていないシフト影画像との第2差分画像を算出し、該第1差分画像と該第2差分画像との差分である第3差分画像を算出し、該第3差分画像に残存差分が存在する場合には立体物が存在すると判断する。
(もっと読む)
パターンの位置合わせ方法、照合方法及び照合装置
【課題】比較元パターンと比較先パターンとを位置合わせする方法に関し、高速且つ高精度に位置合わせする。
【解決手段】比較元パターンと比較先パターンの各々を、角度、スケール、中点X座標、中点Y座標に変換し、角度とスケールから角度ずれを、中点X座標、中点Y座標からスケールの比率を別々に演算し、比較元パターン又は比較先パターンのいずれかを角度・スケール変換した後、実測テンプレートマッチングを行う。テンプレートマッチング処理を最小限とでき、高精度及び高速な位置合わせが可能となる。
(もっと読む)
画像処理装置、画像処理方法、プログラム及び記憶媒体
【課題】 少ない計算コストで、安定した多数の局所領域の設定を可能にする。
【解決手段】 判別対象の画像に含まれる局所領域から抽出された特徴量を用いて、類似する画像を判別する顔認識処理装置100であって、画像から特徴点を抽出する手段(104)と、前記抽出された特徴点を起点とした場合の移動先に関する情報と、移動先において切り出されるべき画像の切り出しサイズとを定義した定義テーブル120を保持する手段(110)と、前記抽出された特徴点を起点として移動した場合の移動先の位置と、該移動先において切り出されるべき画像の大きさとを、前記定義テーブル120の定義に基づいて算出する手段(106)と、該算出された前記移動先の位置において、前記算出された大きさの画像を、前記局所領域として切り出す手段(107)とを備える。
(もっと読む)
検査装置
【課題】パターン認識の所要時間が短い検査装置を提供する。
【解決手段】検査装置は、被検査物を撮影して画像として出力する画像入力部と、上記画像入力部から出力される良品の上記被検査物の良品画像を登録する登録手段および上記画像入力部から出力される検査対象の上記被検査物の検査画像と上記良品画像との差分画像を用いて上記検査対象の被検査物を検査する検査手段を有する判定部と、を備える検査装置において、上記判定部は、上記良品画像の被検査物の複数の部分の画像を抽出して参照画像として登録する参照画像登録手段と、上記参照画像と最も相関性の大きい上記検査画像の被検査物の複数の部分を特定するパターン認識手段と、上記特定された検査画像の被検査物の複数の部分の座標に基づいて位置合わされた上記検査画像と上記良品画像との上記差分画像から欠陥を判断する欠陥判断手段と、を有する。
(もっと読む)
文書認識装置、文書認識方法、コンピュータプログラム
【課題】 文書のフォーム認識を高精度に行えるようにする。
【解決手段】 本発明では、入力文書画像を複数のセルに分割し、当該分割された各セルについての特性値を導出する。そして、当該導出された前記入力文書画像についての各セルの特性値と記憶手段に記憶されている登録文書についての各セルの特性値とを用いて、各セルの演算結果を求め、当該各セルの演算結果に基づいて、前記登録文書と前記入力文書画像との類似度を計算する。
(もっと読む)
位置合わせ方法、位置合わせ装置及びプログラム
【課題】処理負荷を低減し得る位置合わせ方法、位置合わせ装置及びプログラムを提案する。
【解決手段】一方の画像に映し出されるオブジェクトから抽出された第1の点の集合における一部の点群と、他方の画像に映し出されるオブジェクトから抽出された第2の点の集合における一部の点群を基準として、第1の点の集合に対して第2の点の集合を位置合わせし、この後、第1の点の集合におけるすべての点と、位置合わせされた第2の点の集合におけるすべての点を基準として、第1の点の集合に対して第2の点の集合を位置合わせするようにした。
(もっと読む)
パターンマッチング方法及びパターンマッチング装置
【課題】被写体の拡大/縮小、回転及び平行移動があっても、テンプレート画像と対象画像との間での同定を可能とする。また、被写体の拡大率又は回転角度の推定を可能とする。
【解決手段】テンプレート画像及び対象画像のそれぞれについて、LACRドメインを生成し、これらのLACRドメインについて位相限定相関を行う。これにより、両画像の間(すなわち被写体の間)における拡大率及び回転角度を推定できる。ここで両画像についてのLACRドメインの生成は、(a)画像へのRadon変換によるRadonドメインの生成;(b)Radonドメインにおける動径方向での自己相関の算出;(c)Radonドメインの自己相関における動径軸の対数化;(d)自己相関の動径方向における差分の算出、により行われる。LACRドメインの自己相関により生成したLACR自己相関ドメインどうしを比較することにより、画像どうしの同定を行うことができる。
(もっと読む)
画像処理装置、および画像処理方法、並びにコンピュータ・プログラム
【課題】顔画像の正規化処理として実行する画像変換に際して、誤差の発生を抑制した変換を行い正確な顔識別を実現する。
【解決手段】入力顔画像の左右の目の中心を原点とした画像変換処理による正規化処理を実行する。具体的には、正規化前の顔画像を蓄えるSRAMの原点を左右目位置の中心で画素と画素の間の点とし、正規化後の顔画像を蓄えるSRAMの原点を固定した画素点とし、正規化前の座標と正規化後の座標が異なる正規化処理を行なう。本構成により、例えば顔識別処理に際して重要となる目、鼻、口といった顔パーツの位置や形の誤差の発生を抑制した画像変換が実現され、正確な登録画像との類似度判定が可能となり、高精度な顔識別処理が実現される。
(もっと読む)
生体情報の特徴量変換方法、その装置およびそれを用いたユーザ認証システム
【課題】
総当り攻撃に対して安全性が高く、精度劣化の小さいキャンセラブル生体認証を実現する。
【解決手段】
生体情報の特徴量を変換するための特徴量変換部104で、特徴点を三次元空間上の点とみなした上で三次元回転および対称変換を行うことにより、従来特徴量の変換として提案されていた平面上の回転が自由度1であるのに対し、三次元空間上での回転では自由度3となり、総当り攻撃への耐性を高め、またこれらの変換では特徴点間のユークリッド距離を維持できるため、精度劣化も抑制した。
(もっと読む)
画像対間の変換を推定する方法、画像を表現する方法、並びにこの方法のための装置、制御装置、及びコンピュータプログラム
【課題】高精度及びロバスト性が、変更された対数極座標空間でのRST変換パラメータの局所推定と、特徴点の選択の制御と、RANSAC推定器による反復大域改良との組み合わせにより実現する。
【解決手段】画像対間の変換を推定する方法は、画像の複数の領域の局所変換を推定して、推定変換セットを導出することと、当該推定局所変換のサブセットを画像の推定大域変換として選択することを含む。
(もっと読む)
画像認識のための画像記述子
画像に対応する信号を処理することによって画像の表現を導出する方法であって、当該方法は、画像の関数を導出することであって、画像を平行移動、拡大縮小、又は回転させたものの関数は、画像の関数を平行移動又は拡大縮小させたものである、画像の関数を導出することと、画像の表現を導出するために、関数の周波数表現の複数の周波数成分を用いることとを含む。 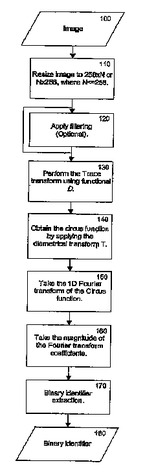 (もっと読む)
(もっと読む)
オブジェクト認識装置およびオブジェクト認識方法ならびにオブジェクト認識用プログラム
【課題】例えば人物の顔等のオブジェクトを、的確且つ迅速に認識することのできるオブジェクト認識装置およびオブジェクト認識方法ならびにオブジェクト認識用プログラムを提供する。
【解決手段】複数の識別器110(110−1,…,…,110−n)によって、オブジェクトの識別を、例えば検出対象画像のリサイズ(120)の倍率を異にしたり検出窓のシフト位置を異にしたりして各個の識別条件で実行し、システムコントローラ130によって、複数の識別器に順次所定のオブジェクトを含んでいる否かの識別を行わせると共に何れかの識別器において否定的な識別結果を得たときには被検出画像は所定のオブジェクトを含んでいない旨の結果を出力する。
(もっと読む)
対象物追跡装置および対象物追跡方法
【課題】視覚追跡システムにおいて、追跡対象の運動特性の変化により追跡が困難な場合がある。
【解決手段】追跡処理部26の追跡開始終了判定部28は所定の条件に基づき追跡処理の開始および終了の判定を行う。追跡を行っている期間、サンプリング部29はひとつ前の画像フレームについて推定された確率密度分布を用いてパーティクルを生成または消滅させる。第1モデル追跡部27aから第nモデル追跡部27nは、それぞれに割り当てられた運動モデルに従いパーティクルを遷移させ、画像処理部22が生成したエッジ画像に対する、各パーティクルに対応する候補曲線の尤度観測を行う。追跡統合部30は、最も高い尤度を観測した運動モデルを特定し、その運動モデルに基づく観測尤度を採用して確率密度分布を推定する。
(もっと読む)
画像照合装置、画像照合方法及びプログラム
【課題】画像データの解像度に応じた精度で画像を照合できる画像照合装置を提供する。
【解決手段】各照合対象画像データに基づく画像特徴情報に基づいて、一方の画像データに基づく画像特徴情報を他方の画像データに基づく画像特徴情報に一致させるようなアフィン変換の変換パラメタである拡縮率及び平行移動量が採りうる値の関係を、各変換パラメタに対応する座標軸を有する2次元空間上における直線として表す直線式を複数決定し、当該2次元空間の少なくとも一部の範囲を照合対象画像データの解像度に基づく大きさの複数の単位領域に分割し、決定した直線式と各単位領域との位置関係に基づいて候補単位領域を選択し、当該候補単位領域に基づいて照合対象画像データの一致度が高くなる変換パラメタの値を算出し、算出した拡縮率及び平行移動量が画像データとの照合処理に供される画像照合装置である。
(もっと読む)
オブジェクト認識装置及びオブジェクト認識プログラム
【課題】学習用画像の解像度の減少度合いに関する指標を設定し、学習用画像として採用するために適正な解像度を判定する。
【解決手段】画像取得手段から学習用標準パターンを取得し、その学習用標準パターンを変形し、その変形された学習用パターンを低解像化して学習用パターンを生成し、その学習用パターンから特徴量を抽出する装置201と、前記抽出された特徴量に基づいて各カテゴリの部分空間を生成する部分空間生成装置202と、前記生成された各カテゴリの部分空間の相関関係から学習用パターンの有する解像度が適性か否かを特定の閾値に基づいて判定する装置203と、その適性と判定された解像度を有する学習用パターンから作成された部分空間に基づいて、その学習用パターンが属するカテゴリを認識する装置204と、を用いて、オブジェクトを認識する。
(もっと読む)
画像照合装置、画像照合方法及びプログラム
【課題】画像照合の精度を向上できる画像照合装置を提供する。
【解決手段】各照合対象画像データのそれぞれに基づいて取得した画像特徴情報に基づいて、一方の画像データに基づく画像特徴情報を他方の画像データに基づく画像特徴情報に一致させるようなアフィン変換の変換パラメタである拡縮率及び平行移動量が採りうる値の関係を、各変換パラメタにそれぞれ対応する座標軸を有する2次元空間上における直線として表す直線式を複数決定し、決定した複数の直線式の交点に対して、当該各交点を分類するクラスタリング処理を実行して、複数の交点を含む少なくとも一つの交点群を候補交点群として決定し、決定した候補交点群に属する各交点の位置に基づいて、照合対象画像データの一致度が高くなる変換パラメタの値を算出し、算出した拡縮率及び平行移動量が画像データとの照合処理に供される画像照合装置である。
(もっと読む)
画像処理装置
【課題】画像処理の性能を向上させる。
【解決手段】
位置合わせにおける移動範囲で、少なくとも1つの方向の移動区間を複数の部分区間に分離することにより、部分位置合わせ区間を構成し、最初からm番目(mは正定数)までの部分位置合わせ区間における一致の度合いの最大値が、規定条件外であるときは、以後の部分位置合わせ区間における照合処理は実行せずに、照合は不一致と判定する。
(もっと読む)
画像処理装置および方法、プログラム
【課題】色物体を適切に認識する。
【解決手段】色領域検出部13は、入力画像上の同じ色の隣接する画素をひとまとまりにして色領域を形成する。マッチング部14は、入力画像上の色領域と、記憶部22に予め記憶されている物体の判別の基準となる物体(モデル)を被写体とした撮像画像(基準画像)上に形成される色領域とが、モデルの同じ部分に対応している可能性があるか否かを判定し、その可能性がある基準画像上の色領域と入力画像上の色領域の候補ペアを検出する。認識部15は、各候補ペアの基準画像上の色領域と入力画像上の色領域が、共通する姿勢パラメータで姿勢変換できる関係にあるか否かを判定し、その判定結果に基づいて、入力画像からモデルを認識する。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】膨張引き算法を用いた差分抽出処理では、追記後原稿の画像から追記前原稿の膨張処理画像を引き算することと、膨張した部分で余分に引き算を行うことになるために、文字のカスレや線の途切れなどが生じたり、追記抽出漏れが生じたりする。
【解決手段】追記前画像と追記後画像との差分をとって追記後画像から追記情報を抽出する追記情報抽出処理(差分抽出処理)において、両画像の比較に先立って、先ず、全体位置・歪補正部101で原稿全体に対して画像の位置合わせを行い、その後に差分抽出部102で大まかな差分情報を得る。次いで、当該差分情報を基に分割画像位置・歪補正部105で局所的な位置合わせを行い、その後に追記情報抽出部106で差分処理を行い、その差分情報を追記情報として抽出する。
(もっと読む)
21 - 40 / 60
[ Back to top ]