
Fターム[5L096EA15]の内容
イメージ分析 (61,341) | 前処理 (3,379) | 正規化 (765) | 位置の正規化(位置合わせ) (432) | 平行移動するもの (60)
Fターム[5L096EA15]に分類される特許
41 - 60 / 60
特徴量分析を使用してデジタル画像データ内のオブジェクト・パーツの位置を推定する方法および装置

【課題】特徴量分析を使用してデジタル画像内のオブジェクト・パーツの位置を推定する方法および装置を提供すること。
【解決手段】一実施形態に係る方法は、デジタル画像のオブジェクト・パーツを含む領域を表すデジタル画像データにアクセスし、所定の領域内の前記オブジェクト・パーツの所定の位置に関するクラスのクラス・データと、前記クラスを識別する特徴とを含む基準データにアクセスし、前記領域の範囲内のピクセル値を使用して前記領域内の前記特徴に関する特徴量を計算し、前記特徴量と前記基準データとを使用して前記オブジェクト・パーツの位置推定値を判定する。
(もっと読む)
生体識別装置

【課題】照合の精度が低下することがなく、生体を適切に識別する。
【解決手段】照合用ハンディスキャナ11は、3次元特徴点データベース31に格納されている血管パターンの3次元特徴点のうち基本姿勢から照合時姿勢への変化の度合いに対応する3次元特徴点を選択して2次元照合用特徴点を生成すると共に、2次元血管画像を解析して血管パターンの2次元特徴点を抽出し、それら2次元照合用特徴点と2次元特徴点とを照合する。照合時には、掌や指の血管を3次元的に撮影する必要がなくなり、掌や指の血管を2次元的に撮影すれば良く、掌や指を自由空間で撮影できる。
(もっと読む)
パターンマッチング方法
【課題】標準パターンを位置検出パターンと角度検出パターンとに分割し、対象画像の位置と回転角度とを個々に求めることにより、回転角度の正確な検出を可能とする。
【解決手段】標準パターンが、対称中心となる代表点の周りにおいて許容された回転では形状変化を生じない位置検出パターンと、代表点の周りでの回転により位置変化を生じる角度検出パターンとに分離される。位置検出部6では、対象画像を位置検出パターンと比較することにより標準パターンとマッチングする候補の位置を対象画像から検出する。角度検出部7では、標準パターンとマッチングする候補に対して標準パターンの代表点の周りで対象画像と角度検出パターンとを比較することにより標準パターンに対する候補の回転角度を検出する。
(もっと読む)
紙葉類識別装置および紙葉類識別方法
【課題】紙葉類のクラスを効率的に推定し、かつ、媒体変動にロバストなパターン識別が可能となる紙葉類識別装置および紙葉類識別方法を提供する。
【解決手段】紙葉類から得られる画像パターンとあらかじめ設定される基準パターンとを比較することにより当該紙葉類の種類や真偽等を識別する紙葉類識別装置において、紙葉類の画像パターンを複数の領域(画素あるいは画素の集合)に分割し、重み付けや選択を行ない、領域ごとに識別結果を得て、その論理的な組み合わせで全体の識別結果を決定する。
(もっと読む)
領域抽出装置、領域抽出方法およびプログラム
【課題】 複数の対象物についてモデルフィッティング手法を適用する場合において、フィッテイング動作前の標準モデルの初期状態の調整を、より効率的に行うことが可能な技術を提供する。
【解決手段】 領域抽出装置1は、複数の標準モデルのうちの第1の標準モデルMS1を用いて、複数の対象物領域のうちの第1の対象物領域BJ1を計測データからモデルフィッティング手法により抽出し、その際の第1の標準モデルMS1の変倍量および/または移動量を、第1の標準モデルと第1の対象物領域との相対的関係として求める。また、装置1は、当該相対的関係に基づいて、複数のモデルのうちの第2の標準モデルMS2(,MS3)の初期状態を修正し、修正後の第2の標準モデルを用いて、複数の対象物領域のうちの第2の対象物領域BJ2(,BJ3)を計測データからモデルフィッティング手法により抽出する。
(もっと読む)
三次元クラスモデルを用いた二次元画像における認識システムおよび方法
二次元画像において、三次元クラスモデルを用いて、クラスのインスタンスを認識する
ためのシステムと方法、および、二次元画像において、三次元クラスモデルを用いて、物体のインスタンスを認識するためのシステムと方法。本発明は、クラス部分の集まりを備える三次元データベースを構築するためのシステムと方法を提供する。ここで、各クラス部分は、部分アピアランスと、部分ジオメトリを含む。本発明はまた、二次元画像の一部を三次元クラスモデルにマッチングさせるためのシステムと方法を提供する。本方法は、二次元画像中で画像特徴を認識するステップ、クラスモデルと画像との間の配置変換を計算するステップ、配置変換の下でクラスモデルのクラス部分を画像特徴と比較するステップを備える。比較においては、部分アピアランスと部分ジオメトリの両方が用いられる。
(もっと読む)
文書自動分類システムと方法及びその記録媒体
【課題】 文書をデジタル化する時に生じる傾斜、変位、等比例拡大縮小などの干渉要因を排除し、且つ、より簡単なハードウェアでデジタル化文書を有効に分類することのできる文書自動分類システムと方法及びその記録媒体を提供する。
【解決手段】 データベースは、少なくとも一つの基本文書を保存する。位置決め情報の取得装置は、デジタル化文書にある複数の物体の位置決め情報を取得する。位置決め装置は複数の物体の位置決め情報を基に、基本文書にある物体との比較を行い、基本文書の対応物体を抽出する。文書比較装置は、複数の物体と基本文書の対応物体を比較し、位置決め処理によって複数の物体と基本文書の対応する物体を重ね合せ、さらに、デジタル化文書にある全ての物体とこれら物体に最も近い位置にある基本文書の物体との距離を基に、前記デジタル化文書と前記基本文書が同じ種類であるかどうかを判別する。
(もっと読む)
検査装置
【課題】
欠陥を高い精度で分類することができる検査装置を提供することにある。
【解決手段】
明るさが近いダイ間の画像信号同士の差分画像信号に対して欠陥検出しきい値と該欠陥検出しきい値よりも低い特徴量抽出のしきい値とを設けることで、欠陥の各種特徴量を精度よく抽出する検査装置。
(もっと読む)
貨幣識別装置、貨幣識別方法および貨幣識別プログラム
【課題】貨幣の画像照合精度を高めるとともに、貨幣の微細な特徴を効率的に照合することを課題とする。
【解決手段】金種識別処理部が硬貨の金種を取得し、取得した金種を受け取った第1の真偽識別処理部が硬貨の真偽識別処理をおこなうよう構成する。そして、年代識別処理部が硬貨の発行年を識別し、第2の真偽識別処理部が、先に識別された金種および発行年を用いて特徴テーブルを検索して特徴部テンプレート画像と特徴範囲とを取得し、特徴部テンプレート画像と入力画像の対応部分とを照合するよう構成する。さらに、真偽判定部が、第1の真偽識別処理、年代識別処理および第2の真偽識別処理の処理結果に基づいて、硬貨の真偽を判定するよう構成する。
(もっと読む)
画像の解析及び表現
閉じた走査曲線を定義するマッピング関数を使用して画像の一次元表現が得られる。この関数は、双方向フィルタを使用して、表現の帯域幅の異なる部分を表す成分信号に分解され、ゼロの群遅延が達成される。 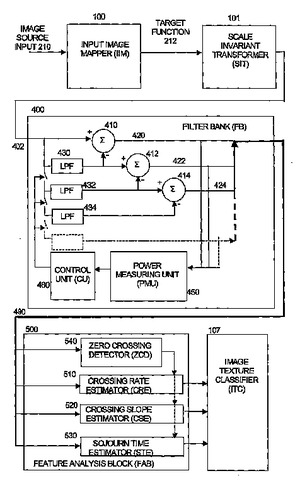 (もっと読む)
(もっと読む)
画像処理装置、および画像処理方法、並びにコンピュータ・プログラム
【課題】 xy方向によって異なる倍率変動を持つ画像データについて正確な画像補正処理を実行する装置、および方法を提供する。
【解決手段】 複数の画像間のずれを補正する画像変換処理構成において、x方向とy方向それぞれの並行移動に対応した補正係数、(Δx,Δy)と、回転補正係数(θ)と、x方向とy方向それぞれの独立した倍率補正例数(βx,βy)の5種類の補正係数を生成し、これらの5種類の補正係数に基づく画像変換処理を実行する。本構成により、例えばスキャン画像など、原本画像に対して、x方向とy方向とで異なる倍率変動を持つ画像についても、xy各方向の独立した倍率補正係数に基づく正確な画像補正を行なうことができる。
(もっと読む)
2次元画像からの3次元オブジェクトの不変視点検出および識別
2次元ソース画像から複数の特徴を含む3次元ソースオブジェクトを検出し、かつ、候補オブジェクト間で視点と照明が不変である検索を実行することによりそのようなオブジェクトの候補データベースから最良マッチングする3次元オブジェクトを探索する方法およびシステムを提供する。本発明はさらに、探索された3次元候補の最適に適合する視点、照明、および変形を決め、かつ、候補の投影とソース画像との適合の質に基づいてソースに関連付けて候補を識別する方法およびシステムを含む。  (もっと読む)
(もっと読む)
画像照合装置、画像照合方法、及び画像照合プログラム
2つの画像を照合する際に、予め部分画像Sの登録を行い、その部分画像Sと画像Iとが最も一致するときの互いの相対位置を求め、その相対位置に基づいて、画像Tと画像Iとの相対位置を決定し、画像Tと画像Iとが一致するか否かを判定している。  (もっと読む)
(もっと読む)
画像処理装置、および方法
【課題】 車両の振動に起因する撮像画像の変位量を算出すること。
【解決手段】 制御装置103は、カメラ101で撮像された撮像画像内で車両の振動に伴って画像内で上下に移動する移動成分を特定し、特定した移動成分の移動履歴に基づいて移動成分の振動周波数の強度を算出し、振動周波数の強度が最も高い振動周波数範囲を抽出し、抽出した所定の周波数範囲内における振動の平衡点で撮像された平衡画像を抽出し、抽出した平衡画像に基づいて、車両の振動によって変位する画像内の変位の中心位置である消失点を検出し、検出した消失点を監視して、各撮像画像における車両の振動に起因する画像の変位量を算出する。
(もっと読む)
生体情報の特徴量変換方法および生体認証システム
【課題】
指紋認証に適用可能な、精度の劣化のないキャンセラブル生体認証を実現する。
【解決手段】
キャンセラブル生体認証における指紋情報の変換手段として、指紋特徴点の座標と方向の対称変換と、座標の回転変換と、方向の回転と、特徴点種別の反転を組み合わせた変換を用いる。また対称変換の有無と、座標の回転角度と、方向の回転角度と、特徴点種別の反転の有無を、変換パラメータとして用いる。この変換は指紋照合アルゴリズムの特徴量空間における等長変換であり、従って二つの特徴量を同一の変換パラメータで変換しても特徴量同士の照合結果は変化せず、従って精度劣化のないキャンセラブル指紋認証が実現される。
(もっと読む)
対象物の形状判別方法及び装置
【課題】円形あるいは矩形状の対象物の形状を高精度で判別できる対象物の形状判別方法及び装置を提供する。
【解決手段】対象物を撮像してその画像の輪郭点を抽出し、各輪郭点を結ぶことにより得られる輪郭線の周囲長並びに該輪郭線で囲まれた部分の面積を求め(S7)、この求めた周囲長並びに面積から円形度を示す第1の評価値を算出する(S8)。また、対象物のモデルを設定し、その対象物の輪郭点での勾配ベクトルと、該輪郭点に対応するモデルの輪郭点での勾配ベクトルとの一致度を示す第2の評価値を算出し(S9)、これら2つの評価値から、対象物が円形であるか否かを判別する(S11、S12、S13)。このような構成では、2つの評価値を用いて円形か否かを判別しているので、形状判別精度が向上する。
(もっと読む)
画像のマッチング・キー生成方法
【課題】画像のインデックスキーを生成する方法で、高い空間周波数構造においては異なっている画像をあまりよく区別しなかった。特に、回転、拡大縮小、平行移動に対して実質的に不変で且つ従来より識別力を向上させたマッチングキーを生成する。
【解決手段】マッチングキーの生成方法は画像(501)の平行移動に実質的に不変な、画像(501)の空間領域の表現値を形成することにより開始する。次に、変換された画像を形成するために、空間領域の表現値における回転及び拡大縮小の少なくともいずれかは平行移動に変換される(580)。次に、変換された画像の平行移動に対して実質的に不変な、変換された画像の表現値が形成される。変換された画像の表現値は画像(501)のマッチング・キー(599)である。
(もっと読む)
画像照合装置、画像照合方法および画像照合プログラム。
【課題】入力画像とテンプレート画像の画像照合を高い精度でおこない、照合率を向上させることを課題とする。
【解決手段】極座標変換済の入力画像およびテンプレート画像から相関値画像を生成し、該相関値画像を画素値が閾値以上であるか否かにより正相関値画像と負相関値画像とに分離し、テンプレート画像を画素値が閾値以上であるか否かにより正テンプレート画像と負テンプレート画像とに分離し、正相関値画像および負相関値画像と正テンプレート画像および負テンプレート画像との組み合わせにより複数の正負分離相関画像を生成し、該正負分離相関画像を用いて照合判定をおこなう。
(もっと読む)
部分空間の逐次更新を伴う適応型確率的画像追跡
動画ビデオ内においてオブジェクトの適応型確率的追跡を行うためのシステムおよび方法(図2)を開示する。本方法では、時間によって変化する固有基底218と、動的モデル224と、観測モデル230と、推論モデル236とを利用する。固有基底218は、オブジェクトのモデルとして利用される。動的モデル224は、オブジェクトの動きを表現し、前の位置に基づいてオブジェクトの予想位置を定義する。観測モデル230は、現在の固有基底218とオブジェクトの観測結果との距離を測定する。推論モデル236は、過去と現在の観測結果に基づいて、オブジェクトの最も可能性の高い位置を予測する。  (もっと読む)
(もっと読む)
監視装置
監視装置は、カメラ(101)で撮影された全体画像をフレーム毎に受けて全体画像に対してフレーム間差分処理、又は事前に用意された背景画像との背景差分処理を行う移動体画像生成部(102)と、差分処理された画像(移動体画像)を1次元情報に変換し、周波数分析を行って、移動物体または群衆の密集の度合いを示す密集度を算出する密集度算出部(103)と、所定日時の密集度に基づいて移動物体又は群衆の基準密集度(モデル値)を算出するモデル生成部(104)と、現時刻における密集度と基準密集度との比較を行って、現時刻における密集度が基準密集度と異なるか否かを判断して判断結果を生成して報知部(107)に与える状況判断部(106)とを備える。  (もっと読む)
(もっと読む)
41 - 60 / 60
[ Back to top ]